Изобрегтение относится к специализированным средствам вычислительной техники и может быть использовано, например, в корреляционных измерителях скоростей, расходов в условиях нестационарности, обусловленной изменением параметров движения протяженных объектов и материальных потоков. Известно корреляционное устройство для определения времени задержки, содержащие линию регулируемой задержки первого входного сигнала, коррелятор и экстремальный регулятор, причем выход линии регулируемой задержки и,второй входной сигнал связаны с входами коррелятора, а выход последнего соединен с управляющим входом регулируемой задержки ij . Недостатком данного устройства является низкая помехоустойчивость и наличие поисковых колебаний, необходимых для поиска и поддержания экстремума, что ограничивает его быстродействие.
Наиболее близким по технической сущности к предлагаемому изобретению является корреляционное устройство для определения времени задержки, построенное по дифференциальной схеме и состоящее из линии регулируемой задержки, выход которой через последовательно соединенные линию постоянной задержки и первьлй корреклятор связан с первым входом блока вычитания,, через второй коррелятор - с втбрым входом блока вычитания, выходной сигнал которого через .усилитель подключен к управляющему входу линии регулируемой задержки 2. Недостатком известного устройствс1 является то, что оно не обеспечивает высокой точности в широком диапазоне измеряемых згщержек. Это связано с тем, что изменение скорости движения протяженных объектов или материальных потоков вызывает изменение корреляционно-спектральных характеристик входных сигналов, что приводит к нестабильности крутизны дискриминаторной характеристики устройства, которая формируется путем вычитания двук смещенных во времени оценок взаимнокорреляционных функций сопоставляемых входных сигналов.
Цель изобретения - повышение точности определения времени относительной задержки сигналов.
Поставленная цель достигается тем что в корреляционное устройство для определения времени задержки, содержащее блок регулируемой задержки, выход которого непосредственно и через блок постоянной задержки соответственно соединен с первыми входами первого и второго корреляторов, выходы которых соединены с соответствую11;имй входами блока вычитания, выход
которого через усилитель соединен с управляющим входом блока регулируемой задержки, введены первый и второй управляемые фильтры, информационные входы которых являются соответственно первым и вторым входами устройст.ва, управляющие входы первого и второго управляемых фильтров объединены и подключены к выходу усилителя, выход первого управляемого фильтра соединен с вторыми входами первого и второго корреляторов, выход второго управляемого фильтра соединен с вторыми входами первого и второго корреляторов, выход второго управляемого фильтра соединен с информационным входом блока регулируемой задержки.
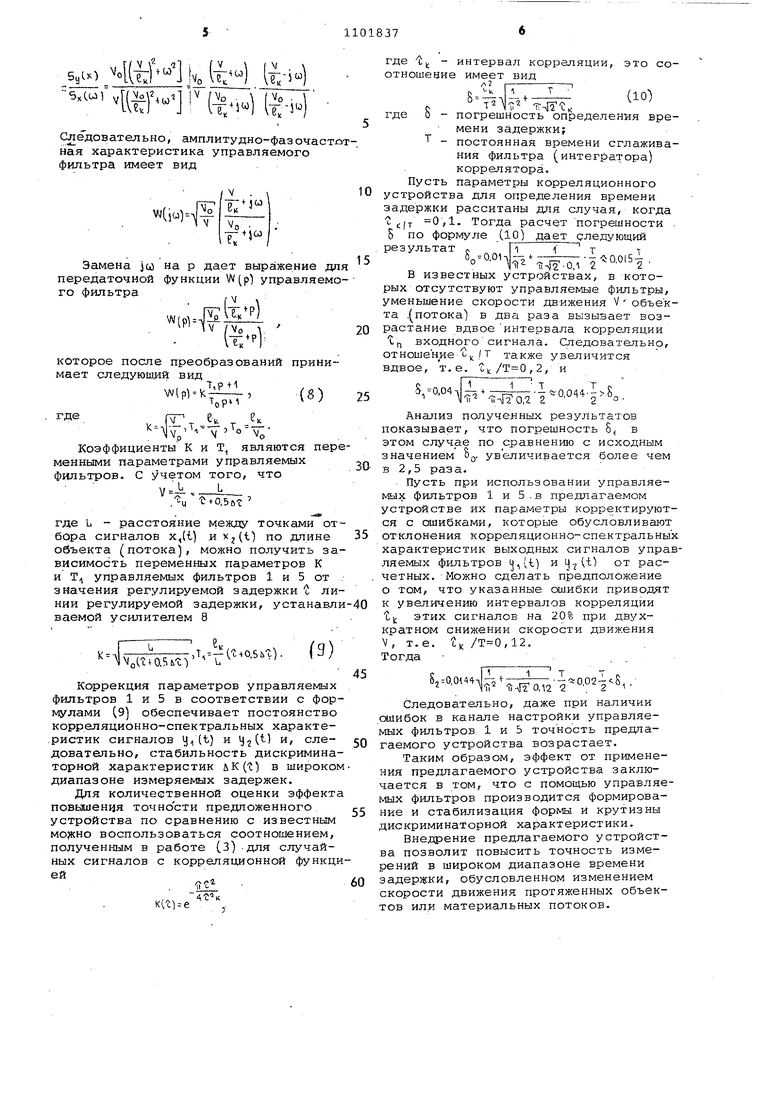
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - графики, Зшлюстрирующие работу устройства.
Устройство состоит из управляемого фильтра 1 (фильтра входного сигнала x,(t) F выход которого подключен к соответствующим входам корреляторов 2 и 3. Выход блока 4 регулируемой задержки, информационный вход которого соединен с выходом второго управляемого .фильтра 5 (фильтра входного сигнала х (t) , связан с другим входом коррелятора 2 и через блок 6 постоянной задержки - с другим входом коррелятора 3, Входы блока 7 вычитания соединены с выходами корреляторов 2 и 3, а его выход через усилитель 8 связан с управляющими входами управляемых фильтров 1 и 5 и блока 4 регулируемой задержки.
Устройство работает следующим .образом.
Входной сигнал х, (t) отстает от входного сигнала ) на искомое время С U . Управляег 1ые фильтры 1 и 5 осуществляют динамическое преобразование входных сигналов х (t) и х, (i) соответственно в сигналы у,Л)и Уз It) с заданными корреляционно-спектральными характеристиками. Блок 4 регулируемой задержки задерживает сигнал Mj{t) на время с , а блок б постоянной задержки - дополнительно ка время ut . Коррелятор 2 вычисляет значения ординат вза11мно-корреляционной функции K,(f) выходных сигналов управляемого фильтра lijil блока 4 регулируемой задержки j-, (t-c). Коррелятор 3 рассчитывает значения ординат взаимно-корреляционной функции ) выходных сигналов управляемого фильтра 1 i.|(i) и блока 6 постоянной задержки ). Елок 7 вычитания определяет разность ьК (t) между выходами корреляторов 2 и 3
bK(t) K(t -Кг (г) ,
которая усиливается усилителем 8. Выходной сигнал усилителя 8 воздействует на управляющий вход блока 4 ре гулируемой задержки в направлении уменьшения абсолютного значения разности iKCt) и на управляющие входы управляемых фильтров 1 и 5с целью стабилизации заданных корреляционноспектральных характеристик сигналов H4,U) . Автоматический режим работы уст- ройства начинается с такого значения t линии регулируемой задержки, кото рое обеспечивает попадание на рабочий участок А графика дискриминаторной характеристики и К (С) , приведенного на фиг. 2а. Если значение разности лКС) отличается от нуля, усилитель 8 через управляющий вход блока 9 регулируемой задержки изменя ет значение регулируемой задержки fl , обеспечивая поиск точки Q., в окрестности которой uK(t 2: 0. Вследствие симметрии взаимно-корреляционных функций K(L и Kj (т)абсцисса точки Q отстоит от абсциссы сц максимума взаимно-корреляционной функции .i) на величину 0, T.e.ll, -С+0,5 При изменении скорости движения протяженного объекта или материального потока происходит изменение искомого времени задержки L и корреляционно-спектральных характеристик входных сигналов х,(1)и x(t). В известных устройствах это приводит к нестабильности крутизны дискриминаторной характеристики ДКС) . Например, при возрастании скорости движения время задержки fu и интервал корреляции входных сигналов уменьшаются, графики взаимно-корреляционных функцийК, t и К (г) сужаются. Точка Q графика дискриминаторной ха рактеристики uKCii) трансформируется 3 пологий участок d так, как показано на фиг. 2$. Нейрина этого участка обуславливает в известных устройствах дополнительную погрешность определения времени задержки . В предлагаемом устройстве изменение корре ляционно-спектральных характеристик входных сигналов ) и х (t) компе сируется коррекцией параметров управ ляемых фильтров. При этом обеспечива ется стабильность корреляционно-спе ральных характеристик выходных сигналов управляемых фильтров 1 и 5 Ij (t| и i,(t) и, следовательно, форм и крутизны дискриминаторной характе ристики д К (t) . Методика определения параметров управляемых фильтров поясняется на примере. Пусть флуктуации сигнала х(Е) по длине Е протяженного объект или материального потока -описываются автокорреляционной функцией Lii .eV-( 1-де 6 - дисперсия; - параметр, характеризующий степень корреляционной связи между значениями случайной функции х(Е) . Для того, чтобы перейти к авуокорреляционной функции К (.L) сигналаX (.1 воспользуемся соотношением & V L , где V - скорость движения пропротяженного объекта или материального потока. В связи с тем, что направление движения объекта (потока) считывается неизменным, можно- запиlehv-Ki. 2). Подстановка формулы 2 в формулу (1) дает выражение для автокорреляционной функции КдТ) сигнала x{t) K.. Для однозначного определения времени задержки i требуется монотонность автокорреляционных функций входных сигналов. Этому условию удовлетворяют случайные сигналы с экспоненциальными корреляционными функциями, например, вида (3). Пусть параметры корреляционного устройства определены для некоторой номинальной скорости движения V V, которой соответствует следующее выражение корреляционной функции Кц (.t-b k,,m . ) Для того,чтобы из случайного сигнала X t) с автокорреляционной функцией вида (3) получить случайный сигнал у (t) с автокорреляционной функцией вида (4), передаточная функция управляемого фильтра W (р) должна отвечать условию 5ylu lwii(o),(u-), (5) где VJ jGjI- амплитудно-фазочастотная характеристика управляемого фильтра; 5х(«У,эц(и1- спектральные плотности сигналов X (t) и (i) . Корреляционным функциям (Э и (4) соответствуют следующие выражения спектральных плоскостей S,, (и)и5у(слз) flL - д 5,,ti) (tfИз формулы (5 с учетом соотношений (б) и 7) находится квадрат модуля амплитудно-фазочастотной характеристики управляемого фильтра (ju)l (sulf-W(iu)W(-iu
v.4iHttHii2
ЧШ- п м)(1:-, Следовательно, амплитудно-фазочаст ная характеристика управляемого фильтра имеет вид V . йГЗ 4i)A Замена ju на р дает выражение дл передаточной функции W(p) управляемо го фильтра: гтр -j- р) W(p J-is. 1 которое после преобразований принимает следующий вид «,Р,..1,(8) дагг е ек j I ; т- Y NVp V °Vo Коэффициенты К и Т, являются пер менными параметрами управляемых фильтров. С учетом того, что .1 ttO,56t где U расстояние между точками от бора сигналов x,(i) .и ) по длине объекта (потока), можно получить за висимость переменных параметров К и Т управляемых фильтров 1 и 5 от значения регулируемой задержки L ли нии регулируемой задержки, устанавл ваемой усилителем 8 ,T, ,Sit). MoCCtO.Bbt Коррекция параметров управляемых фильтров 1 и 5 в соответствии с фор мулами (9 обеспечивает постоянство корреляционно-спектральных характе.ристик сигналов ) и (l и, следовательно, стабильность дискримина торной характеристик &K(t) в широко диапазоне измеряемых задержек. Для количественной оценки эффект повышения точности предложенного устройства по сравнению с известным воспользоваться соотношением, полученным в работе (3)-для случайных сигналов с корреляционной функц ей
где Lj, - интервал корреляции, это соотношение имеет вид
л7
f, I
. -fc M
(10)
Г; I - vii-
0 - погрешность определения времани задержки; постоянная времени сглаживания фильтра (интегратора) коррелятора. Пусть параметры корреляционного устройства для определения времени задержки расситаны для случая, когда 0,1. Тогда расчет погрешности 5 по формуле (10) дает следующий результат л. П f j известных устройствах, в которых отсутствуют управляемые фильтры, уменьшение скорости движения V объекта .(потока) в два раза вызывает возрастание вдвоеинтервала корреляции tfi входного сигнала. Сяедовательнр, отношен ие t- / Т также увеличится вдвое, т.е. ,2, и . Анализ полученных результатов показывает, что погрешность S в этом случае по сравнению с исходным значением SQ- увеличивается более чем в 2,5 раза. Пусть при использовании управляемых фильтров 1 и 5.в предлагаемом устройстве их параметры корректируются с сааибками, которые обусловливают отклонения корреляционно-спектральных характеристик выходных сигналов управляемых фильтров ) и Ч() от расчетных. Можно сделать предпололдание о том, что указанные сшибки приводят к увеличению интервалов корреляции t); этих сигналов на 201 цри двухкратном снижении скорости движения V, т.е. г ,12. Тогда 5.0,011 ,t,,,, h- .ia 2 Г2 Следовательно, даже при наличии оцибок в канале настройки управляеiviHx фильтров 1 и 5 точность предлагаемого устройства возрастает. Таким образом, эффект от применения предлагаемого устройства заключается в том, что с помощью управляемых фильтров производится формирование и стабилизация формы и крутизны дискриминаторной характеристики. Внедрение предлагаемого устройства позволит повысить точность измерений в широком диапазоне времени задер кки, обусловленном изменением скорости движения протяженных объектов или материальных потоков.
K,Vr;
/(jftr/A /«fW

| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕЛЯЦИОННЫЙ АНАЛИЗАТОР | 2002 |
|
RU2227321C2 |
| КОРРЕЛЯЦИОННЫЙ АНАЛИЗАТОР ЧАСТОТНЫХ СВОЙСТВ ЛИНЕЙНОЙ СИСТЕМЫ | 2003 |
|
RU2242013C2 |
| Ультразвуковой датчик расхода газовых и жидких топливных сред | 2018 |
|
RU2696823C1 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ШУМОВОЙ ИНТЕРМОДУЛЯЦИИ | 2003 |
|
RU2252425C2 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ШУМОВОЙ ИНТЕРМОДУЛЯЦИИ | 2003 |
|
RU2244938C2 |
| Устройство радиосвязи | 2019 |
|
RU2713921C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| ВРЕМЕННОЙ ДИСКРИМИНАТОР | 1987 |
|
RU2042148C1 |
| Устройство для корреляционнойОбРАбОТКи СигНАлОВ | 1978 |
|
SU811288A1 |
| АДАПТИВНЫЙ ЭКСПРЕСС-АНАЛИЗАТОР ПАРАМЕТРОВ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2316774C1 |
КОРРЕЛЯЩОННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ЗАДЕРЖКИ, содержащее блок регулируемой задержки, выход которого непосредственно и через блок постоянной задержки .соотx ft; J ветственно соединен с первыми входами первого и второго .корреляторов, выходы которых соединены с соответствующими входами блока вычитания, выход которого через усилитель соединен с управляющим входом блока регулируемой задержки, отличающееся тем, что, с целью повьпиения точности, в него введены первый и второй управляемые фильтры, информационные входы которых являются соответственно первым и вторым входами устройства, управляющие входы первого и второго управляемых фильтров объединены и подключены к выходу усилителя, выход первого управляемо- „ го фильтра соединен с вторыми входа-Щ ми первого и второго корреляторов, л выход второго управляемого фильтра соединен с информационным входом блока регулируемой задержки. эо Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Козубовский С.Ф | |||
| Корреляционные экстремальные системы | |||
| Справочник | |||
| Киев..Наукова думка, 1973, с.36 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коз овский С.Ф | |||
| Корреляционные экстремальные системы | |||
| Справочник | |||
| Киев, Наукова думка, 1973, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
