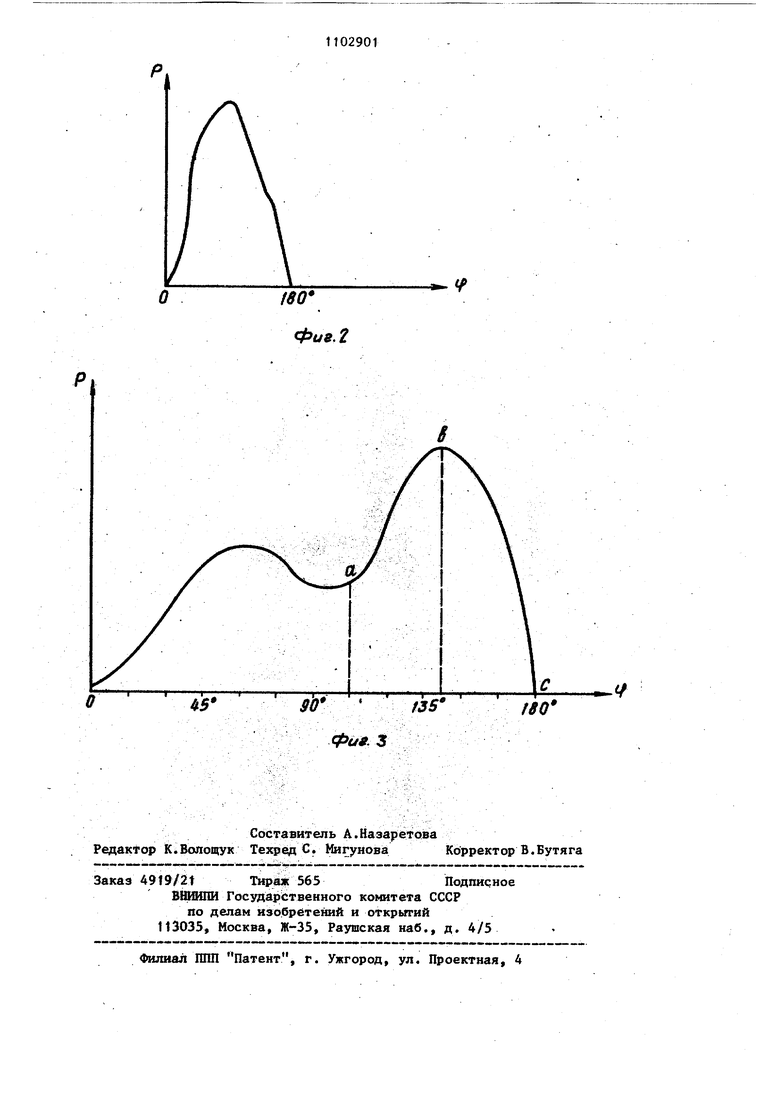
Изобретение относится к области нефтедобычи и может быт.ь использовано для контроля за работой глубиннонасосных скважин, в частности, для контроля их производительности. Известен способ контроля производитепьности скважин, основанный на контроле потребляемой мощности приводного электродвигателя С13. По известному способу производительность насосной установки определяется в зависимости от потребляемой электродвигателем мощности. Посредством статического преобразователя мощности контролируется потребляемая электродвигателем мощность. Значение мощности интегрируется и отображается на цифровом индикаторе в единицах объемного расхода добываемой нефти. ,Известный способ контроля производительности глубинного насоса отно сится к статистическим способам, его показания существенно зависят от глубины скважины, в связи с чем этот способ обладает низкой точность и недостаточной надежностью. Наиболее близким к предлагаемому является способ определения коэффи циента заполнения глубинного щтангрвого насоса, включающий регистрацию кривой потребляемой электродвигателе мощности при ходе щтанг вниз 12}. В известном способе производят интегрирование кривой мощности и полуценное значение сравнивают с заданным значением и тем самым определяют опустошение насоса. Потребляемая эне гия определяется как произведение нагрузки на штангах на скорость пе,ремещения этих штанг. Как известно, при работе станкакачалки,, приводящего в действие глубинный штанговый насос, вследствие действия инер1Д10нных сил в кинематических звеньях привода возникают вынузщенные колебания двойной (по отношению к числу качения) частоты Амплитуда этих колебаний имеет большую величину и существенно влияет на механическую нагрузку в штангах и на форму кривой МОЩНОСТИ. Под влиянием инерционных сил форма кривой существенно искажается, расошфровка ее становится затруднительной, а иногда и невозможной. Внесенные нелинейные искажения в кривую мощности от действия инерционных сил снижают точность. Цель изобретения - повышение точности определения коэффициента заполнения глубинного штангового насоса. Поставленная цель достигается тем, что согласно способу определения коэффициента глубинного штангового насоса, включающему регистрацию кривой потребляемой электродвигателем мощности при ходе штанг вниз, из указанной кривой выделяют кривую, .соответствующую второй гармонике по отношению к частоте качания штангового насоса, после чего опре-. деляют кривую, соответствукидую разнос ти между кривыми потребляемой электродвигателем мощности и второй гармоникой, фиксируют на ней момент начала нарастания максимальной пики мощности и по величине мощности, соответствующей этому моменту, определяют коэффициент заполнения насоса. На фиг. 1 изображена схема, реализующая предложенный способ; на фиг. 2 - типичная реальная кривая потребляемой мощности электроприводом глубинного штангового насоса прихода штанг вниз; на фиг. 3 - разностная кривая мощности, полученная в результате вьсчитання из кривой потребляемой мощности (изображенной на фиг. 2) второй ее гармоники (на фиг. 2 и 3 оси ординат соответствуют потребляемой мощности, а оси абсцисс - положению головки балансира станка качалки). Сущность способа заключается в следующем. При работе глубинного штангового насоса потребляемая электродвигателем 1 мощность контролируется с помощью статического преобразователя мощности 2. Типичная форма сигнала мсмцности на выходе преобразователя 2 изображена на фиг. 2. Выходной сигнал статического преобразователя мощности подается на вход блока 3 вьзделения второй гармоники и одновременно на вход блока 4 задержки (время задержки сигнала в блоке 4 задается равным времени обработки сигнала в блоке 3). В блоке 3 из контролируемой мощности вьщеляется вторая гармоника (по отношению к частоте качания штангового насоса). Блок 3 может быть выполнен с использованием активного фильтра, настроенного на частоту второй гармоники. Электрический сигнал, соответствующий второй гармонике, далее
J
подается на вычислительное устройство 5, на другой вход которого подается электрический сигнал от блока задержки 4, соответствующий контролируемой мощности. В вычислительном устройстве 5 из контролируемой мощности вычитают вторую гармонику, далее разностная кривая мощности воспроизводится на экране устройства 6. В качестве устройства воспроизведения разностной кривой мощности может быть использован, например, осциллограф с электроннолучевой трубкой
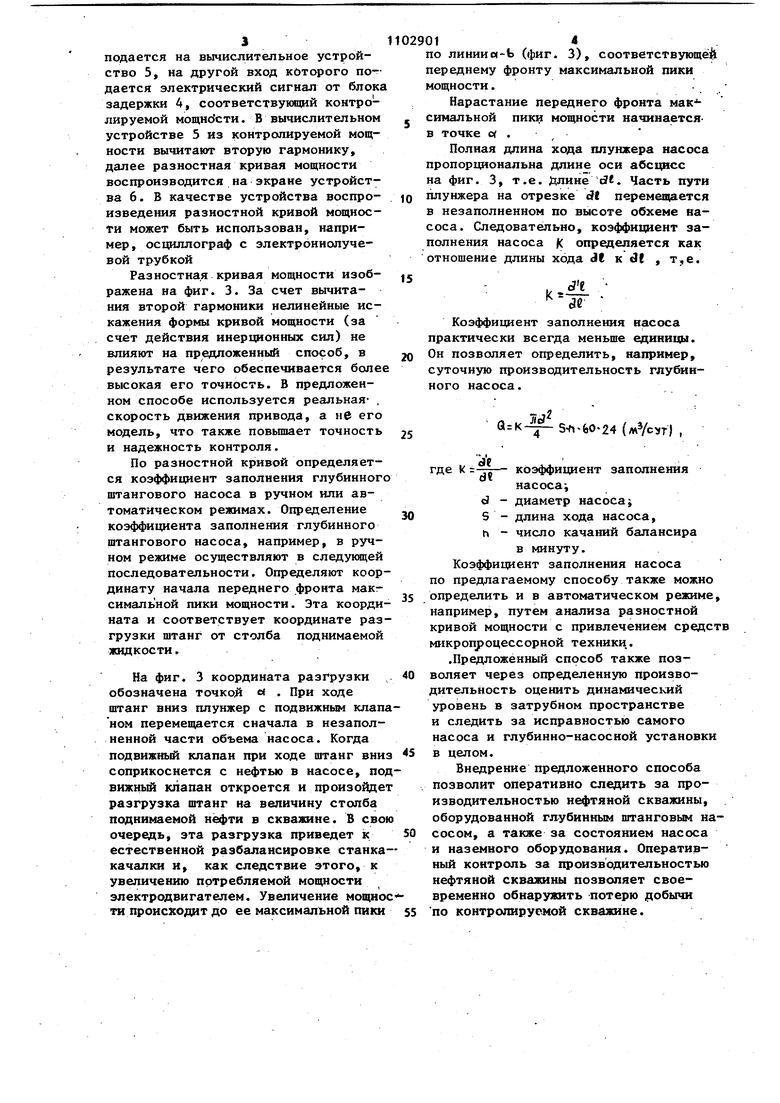
Разностная кривая мощности изображена на фиг. 3. За счет вычитания второй гармоники нелинейные искажения формы кривой мощности (за счет действия инерционных сил) не влияют на предложенный способ, в результате чего обеспечивается более высокая его точность. В предложенном способе используется реальная- , скорость движения привода, а не его модель, что также повышает точность и надежность контроля.
По разностной кривой определяется коэффициент заполнения глубинного штангового насоса в ручном или автоматическом режимах. Определение коэффициента заполнения глубинного штангового насоса, например, в ручном режиме осуществляют в следукщей последовательности. Определяют координату начала переднего фронта макгсимальной тшки мощности. Эта координата и соответствует координате разгрузки штанг от столба поднимаемой жидкости.
На фиг. 3 координата разгрузки обозначена точкой с При ходе штанг вниз плунжер с подвижным клапаном перемещается сначала в незаполненной части объема насоса. Когда подвижный клапан при ходе штанг вниз соприкоснется с нефтью в насосе, подвижный клапан откроется и произойдет разгрузка штанг на величину столба поднимаемой нефти в скважине. В свою очередь, эта разгрузка приведет к естественной разбалансировке станкакачалки и, как следствие этого, к увеличению потребляемой мощности электродвигателем. Увеличение мощное ти происходит до ее максимальной пики
029014
по линииса|-Ь (фиг. 3), соответствующей переднему фронту максимальной пики мощности..
Нарастание переднего фронта мак, симальной пики мощности начинаетсяв точке сх .
Полная длина хода плунжера иасоса пропорциональна длине оси абсцисс на фиг. 3, т.е. Длине d«. Часть пути O плунжера на отрезке Л перемещается в незаполненном по высоте обхеме насоса. Следовательно, коэффициент заполнения насоса К определяется как отношение длины хода dl к df , т,е.
15
К
(ЗС
Коэффициент заполнения васоса практически всегда меньше единицы. Он позволяет определить, например, суточную производительность глубинного насоса.
ИЗ
5Ч160.24 () ,
25
de
где k -г;- коэффициент заполнения di
насоса
cJ - диаметр насоса j
S - длина хода насоса,
h - число качаний балансира
в минуту.
Коэффициент заполнения насоса по предлагаемому способу также можно определить и в автоматическом режиме, например, путем анализа разностной кривой мощности с привлечением средств микропроцессорной техники,.
.Предложенный способ также позволяет через определенную производительность оценить динамический уровень в затрубном пространстве и следить за исправностью самого насоса и глубинно-насосной установки в целом.
Внедрение предложенного способа позволит оперативно следить за производительностью нефтяной скважины, оборудованной глубинным штанговым насосом, а также за состоянием насоса и наземного оборудования. Оперативный контроль за производительностью нефтяной скважины позволяет своевременно обнаружить потерю добычи °по контролируемой скважине.
IBO
Фи8.2
СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЗАПОЛНЕНИЯ ГЛУБИННОГО ШТАНГОВОГО НАСОСА, включающий регистрацию кривой потребляемой электродвигателем мощности при ходе штанг вниз, отличающийся тем, что, с целью повьш1ения точности определения, из кривой, потребляемой электродвигателем мощности выделяют кривую, соответствующую второй гармонике по отношению к частоте качания штангового насоса, после чего определяют кри, вую, соответствующую разности между кривыми потребляемой электродвигателем Мощности и вторбй гармоникой, фиксируют на ней момент начала нарастания максимальной пики мощности и по величине мощности, соответствукнцей этому моменту, определяют коэффициент заполнения насоса.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизация и телемеханизация нефтяной промышленности, 1978 № 10, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4034808, кл | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
