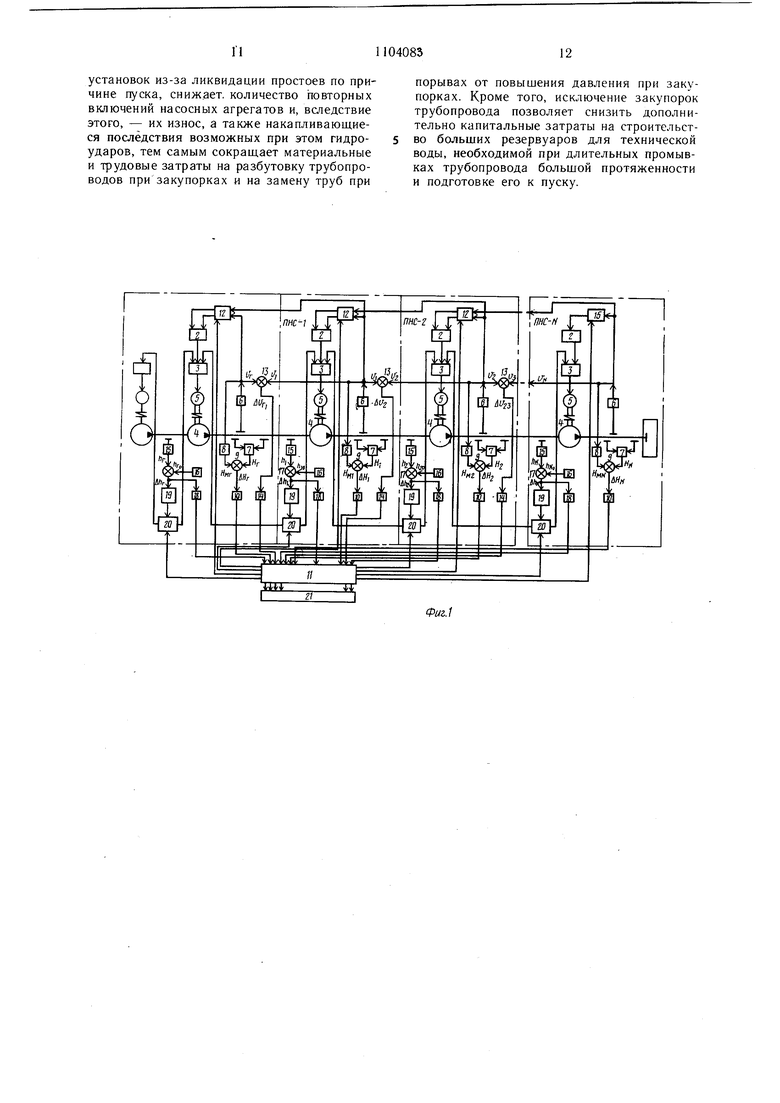
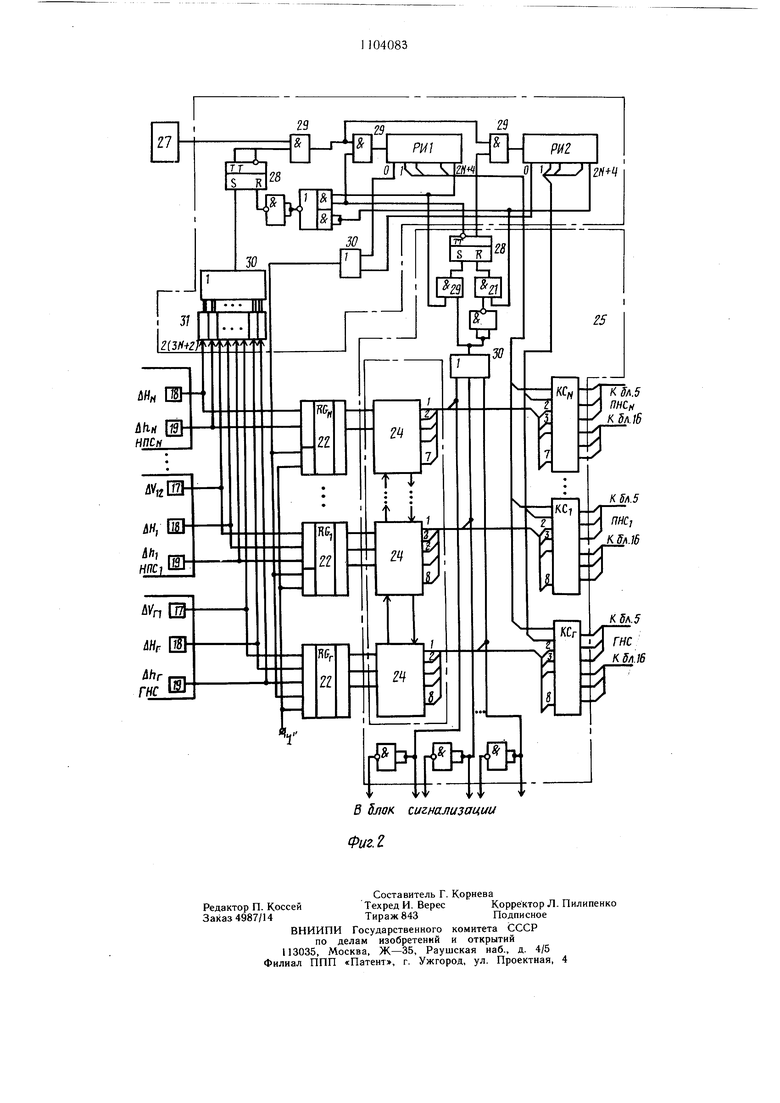
Изобретение относится к системам контроля и регулирования пусковых многоступенчатых гидротранспортных трубопроводов и может быть использовано в горной и горнорудной промьинленности на горно-обогатительных комбинатах, в системах магистрального гидротранспорта сыпучих и кусковых материалов, копцемтратоЕ и отходов производства, золотоудаления на электростанциях, а также в )азветвленных системах коммунальпого хозяйства для транспорта промьннлен1П)1х и городских отходов в потоке сгочной жидкости. Известно устройство для автоматического управления ириводами насосных агрегатов мно11)ступенчатой гидротранспортной трубопроводной установки, содержащее для каждой ciyiieiiii т|)убопровода программный блок, связанный (, пусковой аппаратурой насосного агрегата, датчик расхода гидросмеси и датчкк перепада давлепия па участке трубопровода и (1)орчп)ователь сигпала, пропорционально допустимому нерепаду давления, подключенный входом к датчику расхода, а выходом к од1И)му из входов апемента сравнения, Д1птой вход которого соединен с датчиком перепада даапепия, а выход - с входом пороговою элемента 1. Одпако извесгноо устрг)йство не обеспечивает сипхропизацию пускового режима перекачных ступеней мпогоступенчатых гидротранспортпых систем; не обеспечивает регулирование пусковой скорости на предыдущих и последующих ступенях при нарушении пускового режима любой перекачной ступени и ее зарегулировании; не обеспечивает синхронизацию режимов пуска предыдущих и последующих ступеней после устранения нарущения пускового режима повреждений ступени и ее последующем пуске; не обеспечивает поддержания заданной величины подпоров на всех ступенях системы при зарегулировании и регулировании ступени с нарущенным режимом пуска, а также не обеспечивает устойчивости пускового режима многоступенчатой системы из-за снижения подпоров и разрыва потоков на ступенях вследствие несинхронности их пусковых зажимов, что, в конечном счете, не обеспечивает необходимой надежности устройства. Целью изобретения является повыщение надежности. Цель достигается тем, что устройство для автоматического управления приводами насосных агрегатов многоступенчатой гидротранспортной - трубопроводной установки, содержащее для каждой ступени трубопровода программный блок, связанный с пусковой аппаратурой насосного агрегата, датчик расхода и датчик перепада давления на участке трубопровода и формирователь сигнала, пропорционального допустимому перепаду давления, подключенный входом к датчику расхода, а выходом - к одному из входов элемента сравнения, другой вход которого соединен с датчиком перепада давления, а выход - с входом порогового элемента, снабжено анализирующим блоком и подключенными к одним его входам для каждой ступени трубопровода дополнительными пороговыми элементами, соединенными со входами последних дополнительными элементами сравнения, подключенными к выходу одного из них блоком обратных связей, переключателем обратных связей, подключенным одним из входов к выходу последнего, датчиком и задатчиком подпора, подключенными к входам одного из дополнительных элементов сравнения, при этом входы других элементов сравнения подключены к датчикам расхода собственной и последующей ступеней и блоком переключения прямых связей, выходы которого подключены к входам программного блока, а первый, второй и третий входы - соответственно к выходам датчиков расхода собственной и последующей ступеней и к одному из выходов анализирующего блока, другие ()ды которого связаны с другим входом соответствующего переключателя обратных связей, при этом другие выходы переключателя обратных связей подключены к пусковой аппаратуре насосных агрегатов собственной и предыдущей ступеней. Анализирующий блок содержит регистры, подключенные к их выходам дещифратор и коммутирующий узел на выходе последнего и распределитель импульсов с генератором тактовых импульсов, подключенным к его управляющему входу, сигнальные входы которого объединены с входами регистров и являются входами блока, один из выходов распределителя соединен с входами записи регистра, другие - с управляющими входами коммутирующего узла, выходы которого являются выходами блока. На фиг. 1 схематически изображено предлагаемое устройство; на фиг. 2 - анализирующий блок. Устройство (фиг. 1) содержит для каждой ступени трубопровода 1 программный блок 2, связанный с пусковой аппаратурой 3 насосного агрегата 4 с приводом 5, датчик 6 расхода гидросмеси, датчик 7 перепада давления на участке трубопровода 1 (число таких участков, а следовательно, и датчиков может быть любым, для простоты на фиг. 1 показан случай одного контролируемого участка для каждой ступени). Устройство содержит также формирователь 8 сигнала, пропорционального допустимому перепаду давления, вход которого подключен к выходу датчика 6, а выход - к одному из входов одного элемента 9 сравнения, другой вход которого подключен к выходу датчика 7, а выход - ко входу одного
порогового элемента 10, выход которого соединен с одним из входов анализирующего блока 11. Выход датчика 6 каждой ступени подключен также к входам блоков 12 переключения прямых связей своей и предыдущей ступеней и к одним входам других элементов 13 сравнения своей и предыдущей ступеней, другие входы которых соединены с выходами датчиков 6 последующей ступени, а выход каждого из них - через другой пороговый элемент 14 - с другим входом анализирующего блока 11.
Выходы блока 12 соединены со входами блока 2. В состав устройства входят также на каждой ступени датчик 15 и задатчик 16 подпора и подключенный к их выходам своими входами элемент 17 сравнения, выход которого через пороговый элемент 18 подключен к третьему входу блока 11, а также к блоку 19 обратных связей на его выходе, подключенным одним входом к выходу блока 11, а выходами - к пусковой аппаратуре 3 своей и предыдущей ступеней.
К выходам анализирующего блока 11 подключен блок 21 сигнализации.
Анализирующий блок 11 (фиг. 2) содержит на своем входе регистры 22, подключенный к их выходам дещифратор 23 на избирательных схемах 24, коммутирующий узел 25 на выходе дешифратора 23 и распределитель 26 импульсов с генератором 27 тактовых импульсов на входе последнего.
Распределитель выполнен на RS-триггерах 28, элементах 29 И, элементах 30 ИЛИ, одновибраторе 31.
Работа устройства заключается в следующем.
В исходном состоянии, до начала вывода многоступенчатого трубопровода в рабочий режим, на управляющих щинах блока 11 коммутации сформированы сигналы, передаваемые в блоки 12 К-х ступеней, где К 1, .., N-fl, по которым блок 12 К-й ступени подключает выход датчика 6 К-ой ступени на один из входов программного блока 2 К-ой ступени и отключает другой его вход от выхода датчика 1 (К-Ы)-й ступени, а переключатель 20 подключает выход блока 19 обратных связей к одному из входов пусковой аппаратуры 3 для регулирования привода 5 насоса 4. После выполнения всех подготовительных операций к пуску трубопровода на выходе программного блока 2 по заданной программе (закону) формируются сигналы, поступающие на вход пусковой аппаратуры 3, которая, будучи управляемая ими, изменяет обороты 5, тем самым по программе изменяет подачу насоса 4 и, следовательно, скорость (расход) гидросмеси в трубопроводе 1 головной ступени.
При медленном нарастании скорости гидросмеси в трубопроводе 1 на выходе датчика
6 появляется сигнал, пропорциональный значению расхода гидросмеси, появляющийся из-за раздутия (упругой деформации) трубопровода сначала в начальном участке 5 головной ступени. Этот сигнал поступает на вход формирователя 8, на выходе которого формируется сигнал, пропорциональный перепаду Нкг давления в нормальном пусковом режиме. Сигнал допустимого перепада
0 лг поступает на один из входов элемента 9 сравнения, где сравнивается с сигналом действительного пускового перепада Нр, поступающим на другой его вход с выхода датчика 7 перепада. Если на трубопроводе 1 ступени установлено несколько датчиков 7,
5 то их выходные сигналы Нг сравниваются с допустимыми Нмг в соответствующих их количеству элементах сравнения. По этим сигналам на выходе элемента 9 сравнения формируется сигнал отклонения дНг, т. е. дНг Нг-НИР , пропорциональный разности между действительным перепадом Нг и модельным Нмг, имеющимся при данном расходе. Если нарущений пускового режима на участках нет, то отклонение АНг не превышает значения порога срабатывания вНрсоот5 ветствующего порогового элемента 10, т.е; , и пороговый элемент 10 остается нейтральным: формируется на его выходе логический сигнал «О. Этот логический «О, поступающий на соответствующий вход блока 11, не изменяет состояния сигналов
0 на управляющих щинах блока 11, чем обеспечивается сохранение исходного состояния всех блоков 12. Поэтому выходной сигнал с датчика 6, поступающий через первый вход блока 12 на соответствующий вход програм5 много блока 2, способствует продолжению выполнения программы на увеличение скорости в трубопроводе головной станции, чем подтверждает правильность ее выполнения в пусковом режиме. Одновременно на соответствующих выходах сигнальных щин бло ка 11 формируются сигналы в блок 21 сигнализации, индицирующий диспетчеру о нормальном протекании режиме пуска на головной ступени.
5По истечении некоторого времени, из-за
переходного процесса в трубопроводе, на входе первой ступени появляется подпор hj, зависящий от скорости транспортированиягидросмеси, измеряемый датчиком 15 подпора первой ступени. Сигнал с выхода дат° чика 15, пропорциональный действительному подпору hi на входе первой ступени, поступает на один из входов элемента 17 сравнения, на другой вход которого от задатчика 16 подпора поступает сигнал h,o, соответствую5 Щий требуемой установке подпора для первой ступени. После сравнения действительного подпора hi с заданным h,, в элементе 17 сравнения, на его выходе формируется
сигнал отклонения дН, пропорциональный разности между h.( и hj , т. е.
дН h,, - hjo,
который ноступает на входы блока 19 и порогового элемента 18 первой ступени. При отклонении Ahj, превышающем значение ЙН порога срабатывания элемента 18, т.е. Л 6hi, на его выходе формируется логический сигнал «1, поступающий на соответствующий вход блока II. По этому сигналу блок 11 формирует сигнал на одном из выходов управляющих щин, адресованный переключателю 20 первой ступени, для подключения переключателем 20 выхода блока 10 на один из дополнительных входов пусковой аппаратуры 3 первой ступени.
При превыщении подпором hj первой ступени своей уставки h, блок 19, являющийся регулятором подпора первой ступени, увеличивает обороты привода 5 с учетом программы, выдаваемой программным блоком 2 на основной вход пусковой аппаратуры 3, что обеспечивает плавное нарастание скорости гидросмеси в трубопроводе 1 первой перекачной ступени и уменьшением тем самым подпора hi на ее входе до величины hjo,.
Таким образом, первая ступень, благодаря обратной связи, подключаемой на дополнительные входы своей пусковой аппаратуры регулирования, «следит за скоростью в трубопроводе головной ступени вплоть до выхода на рабочий режим.
Если нарушений пускового режима на первой ступени нет, то сигнал отклонения ДЬ, формируемый на выходе элемента 9 сравнения, и пропорциональный разности между действительным перепадом h давления, снимаемым с выхода датчика 7, и допустимым Hjtj, снимаемым с выхода формирователя 8, имеющимся при данном расходе в трубопроводе первой ступени, не превышает значение SH порога срабатывания своего порогового элемента 10, т.е. HI-HMj 6Hj, и он остается в нейтральном положении, формируя на выходе логический сигнал «О. Последний,поступающий на соответствующий вход блока 11, не изменяет состояния сигналов на его управляющих шинах, благодаря чему остаются неизменными состояния блока 12 и переключателя 20 первой ступени. Поэтому сигнал с выхода датчика 6 первой ступени, поступающий через блок 12 на соответствующий вход программного блока 2, обеспечивает отработку программы увеличения скорости в трубопроводе 1 первой ступени перекачной станции, а блок 19, плавно корректируя по обратной связи обороты привода 5, согласует подачу насоса 4 первой ступени с расходом гидросмеси в трубопроводе головной насосной станции (ГНС), тем самым поддерживая на входе первой ступени подпор hj, равный заданной установке, hjo, т.е. Д hi hj - h(. Одновременно блок 11 по соответствующим выходам сигнальных Н1ин передает в блок 21 сигнализации информацию, отображающую диспетчеру нормальное протекание режима пуска и на первой ступени перекачной насосной станции (ПНС).
После появления подпора h на входе
0 второй ступени насос последней отрабатывает программу увеличения скорости в трубопроводе своей ступени, одновременно плавно корректируя обороты 5 за счет блока 19, насос первой ступени «следит за скоростью первой ПНС и таким образом согласует
5 подачи первой и второй ступеней вплоть до выхода на рабочий режим.
Таким образом, если нарушений пускового режима по всей трассе многоступенчатой системы нет, перекачные К-е ступени,
0 К 1,N в режиме слежения последовательно, следуя за ГПС, являющийся задающей, выходят на рабочий режим. При этом блок 21 сигнализации информирует диспетчера о нормальном протекании режима пуска и вывода многоступенчатого трубопровода на ра5 бочий режим.
Если нарушение пускового режима произошло на ГНС, то сигнал отклонения ДНг на выходе элемента 9 после сравнения в нем сигналов действительного перепада Иг давQ ления от датчика 7 и допустимого Нкг от формирователя 8 при данном расходе гидросмеси в трубопроводе I ГНС, превышает порог дНг срабатывания порогового элемента 10, т. е. , на выходе которого формируется логический сигнал «1,
5 поступающий на соответствующий вход блока 11. По этому сигналу блок 11 идентифицирует место (перекачную ступень), где произошло нарушение пускового режима, после чего на соответствующих выходах блока 11 формируются управляющие сигналы,
адресованные блоку 12 и переключателю 20 ГНС. При этом сигнал, адресованный в блок 19, отключает связь выхода датчика 6 ГНС от соответствующего входа программного блока 2 ГНС и выдает сигнал запрета на
5 увеличение скорости. В результате программный блок 2 через основной вход пусковой аппаратуры 3 прекращает увеличение оборотов привода 5 и, как следствие, возрастание подачи насоса 4 ГНС, что приводит к прекращению нарастания скорости гидро0 смеси в трубопроводе головной ступени до восстановления нормального режима.
Для предотвращения резкого возрастания подпора hr на входе основного насоса 4 ГНС и, вследствие этого, возрастания скорости гидросмеси в трубопроводе головной ступени, приводящего к нарушению восстановления нормального пускового режима, сигнал, адресованный переключателю 20,
приводит к отключению последним выхода блока 19 от дополнительного входа пусковой аппаратуры 3 OCHOBHOTQ насосного агрегата 4 ГНС и подключению блока 19 к пусковой аппаратуре 3 регулирования привода подпорного насоса 23 этой ступени. Блок 19, подключенный к аппаратуре 3 регулирования привода подпорного насоса 23, уменьшает обороты привода, тем самым производит согласование подачи подпорного насоса 23 и основного насоса 4 для поддержания подпопора перед ним, равного установке .
Одновременно с формированием управляющих сигналов блоку 12 и переключателю 20 ГНС блок 11 формирует сигналы и в блок 21, сигнализируя диспетчеру о нарушениях пускового режима на ГНС. Такая работа ГНС будет сохраняться до установления нормального режима, пока не будет выполняться условие дНг Нр - Нйг(5Нг, после чего пороговый элемент 10 ГНС переходит в нейтральное состояние и снимает логический сигнал «1 с соответствующего входа, блока 11. В результате этого блок 11 выдает управляющие команды на ГНС в следующей последовательности: сначала на блок 12, который подключает выход датчика 6 расхода ГНС на соответствующий вход программного блока 2, чем снимается запрет на отработку программного увеличения скорости в трубопроводе головной ступени, затемпосле ее нарастания, - на переключатель 20, который отключает блок 19 от аппаратуры 3 подпорного насоса 23 и подключаег его на соответствующий вход аппаратуры 3 основного насоса 4, тем самым корректируя оборотами привода 9 подачу основного насоса 4 для поддержания на его входе величины подпора hr, равный уставке Им. Одновременно блок 11 формирует информационные сигналы в блок 21, сигнализирующие диспетчеру о восстановлении нормального пускового режима на ГНС.
Наиболее характерным из всех нарушений .пускового режима в многоступенчатой гидротранспортной системе является нарушение пускового режима на средней, например первой, перекачкой ступени (ПС). В этом случае, если хотя бы на одном участке первой ПС действительный перепад давления HI от датчика 7 окажется больше допустимого Нд таким, что отклонение iHi HI - HMI Превысит порог 5 HI срабатывания порогового элемента 10, T.e., то последний, срабатывая, формирует логический сигнал «1 на соответствующем входе блока 11. Воспринимая этот сигнал, блок 11 выявляет ступень, на которой имеет место нарущение пускового режима, после чего, так как эта первая ступень формирует сигнальную информацию в блок 11 для диспетчера о нарущении режима пуска на ней и адресует
управляющие команды в б/нжи 2 и переключатели 20 первой IliK, и ГНС, 11()оизиодят операции is следующей п()е.-|едовате.-||, ности: отключают выход датчика В iiejViiDii 5 ступени от соответствующего входа nnoiраммного блока 2 и выдают загфот па iijjorрамму увеличения скорости гидросмеси же ступени; отключают выход ларшка 6 расхода ГНС от соответствующего входа
Q программного блока 2, выдают напрет пя программу увеличения скорости в трубопроводе ГНС, подключают выход датчика 6 первой пне через второй вход блока 12 ГНС на соответствующий вход программного блока 2 и снимают запрет на программу сниже5 ния скорости в трубопроводе ГНС; отключают выходы блоков 19 первой ПНС и ГНС от дополнительных входов пусковой аппаратуры 3 этих же ступеней.
Состояние блоков 12 и переключателей
Q 20 всех остальных перекачных ст пеней, следующих за первой ПНС, сохраняется неизменным и таким, каким было к моменту нарушения режима пуска на первой Г1НС. В результате этих операций сразу же после срабатывания блоков 12 и переключа5 телей 20 первой ПНС и ГНС осуществляются следующие действия. Из-за запрета на обработку программы увеличения скорости и отключения блоков 19 обратных связей регулирования подпоров приостанавливается увеличение оборотов 5 первой ПНС и ГНС что приводит к прекращению увеличения скорости гидросмеси в трубопроводах этих ступеней. А подключение блоком 12 от первой ПНС и ГНС и включение программы снижения скорости на ГНС вызывает уменьщение
5 оборотов привода 5 на ГНС, что обеспечивает снижение скорости в трубопроводе ГНС до величины скорости на первой ПНС во избежание резкого увеличения подпора h на входе первой ПНС и возрастания скорости в efe трубопроводе из-за подпора, которое
привести к закупорке трубопровода первой ПНС.
Резкость скоростей (расходов) в начале трубопровода ГНС и в конце его на входе
5 первой ПНС обусловлена инерционными свойствами.длинного трубопровода. Сигнал А l/rj , пропорциональный это-й разности скоростей, формируется на выходе элемента 13 сравнения ГНС по сигналам от датчиков 6 ГНС и первой ПНС, т.е. - Vi и поступает на вход соответствующего порогового элемента 14. В случае значительного рассогласования Vp скоростей в начале трубопроводов ГНС и первой ПНС, вызванного нарушением режима пуска, превышающего величину Ч порога срабатывания элемента 14, т.е. AVfj 6Vrj, на его выходе формируется логический сигнал «1, поступающий на соответствующий вход блока 11.
По этому сигналу блок 1 Ьсохраняет команду запрета в блоке 12 на увеличение скорости в трубопроводе первой ПНС, а в блоке 12 ГНС сохраняется подключение прямой компенсирующей связи от первой ПНС и выдерживается программа снижения скорости в программном блоке 2 ГНС до выравнивания скоростей на ГНС и первой ПНС.
После установления равенства скоростей ГНС и первой ПНС выполняется условие
4Vpj Vr-Vj 6Vr и пороговый элемент 17 переходит в нейтральное состояние, фор.мируя на выходе логический сигнал «О, передаваемый в блок 11. В результате этого блок И формирует управляющие команды в блок 12 ГНС, по которым последний отключает прямую компенсирующую связь с первой ПНС на ГНС, выдает запрет на программу снижения скорости и сохраняет запрет на программу увеличения скорости в программном блоке 2, а также выдает команду переключателям 20 ГНС и первой ПНС, которые подключают выходы блоков 19 ГНС и первой ПНС на дополнительные входы аппаратуры 3 регулирования привода 5 соответственно подпорного 23 и основного 4 насосов ГНС. При этом, по сигналам рассогласования дЬ - h,o соответственно от задатчиков и датчиков подпора на входе основных насосов ГНС и первой ПНС, блоки 19 ГНС и первой ПНС, плавно регулируя обороты электроприводов, осуществляют дальнейшее согласование режимов ГНС и первой ПНС только за счет регулирования скорости головной ступени, а не первой перекачной (так как скорость ее регулирования нельзя определить из-за опасности закупорки), для поддержания под пора hj на входе первой ПНС, равного ее уставке hio. После восстановления пускового режима на первой ПНС сигнал Hj на выходе элемента 9 сравнения этой ПНС становится меньше б Н.т.е. ДН -(5HI, и пороговый элемент 10 восстанавливает свое нейтральное состояние, формируя на выходе логический сигнал «О, по которому блок 11 информирует в блок 21, сигнализируя диспетчеру о восстановлении нормального пускового режима на первой ПНС.
Согласование режимов второй и последующих ПНС осуществляется способом, .описанным ранее, в режиме «слежения последующей ступени за предыдущей.
Аналогично работает устройство при нарушении пускового режима на любой (не головной)перекачной ступени.
Так, при нарущении режима на последней (N-й) ступени и выполнении условия Л Нд- S Hff, где 5 Hjj- порог нечувствительности соответствующего порогового элемента 10, на выходе порогового элемента формируется логический сигнал «1, поступающий на соответствующий вход блока 11.
После выявления нарушения пускового режимана N-й ПНС блок 11 информирует в блок 21, сигнализируя диспетчеру об этом нарущении, и адресует управляющие команды в блоки 12 и переключатели 20 последней и предыдущих ступеней, которые осуществляют следующие операции и действия: отключают датчики 6 К-х ступеней, К 1, N + 1, от входов соответствующих программных блоков 2 и прекращают выполнение программы нарастания скорости, чем предотвращается опасность закупорки трубопровода N-й ступени; отключают блоки 19 К-х ступеней от пусковой аппаратуры 3 соответствующих К-х ступеней, , N + 1, и подключают все прямые компенсирующие связи от датчиков 6 каждой последующей, начиная с последней, к предыдущей на соответствующие входы программных блоков 2 с одновременным включением в них программы снижения скорости, чем производится выравнивание скоростей Vr , Уц, К 1, N, в трубопроводах всех ступеней, предотвращение увеличения подпоров hf., Ьц, К 1, N, и возможности из-за подпоров увеличения скорости Vy N-ой ступени с возмож ностью образования закупорки. После выравнивания скоростей всех ступеней, когда выполнятся условия А VK-I , , К, К 1, N, пороговые элементы 14 К-ступеней, , N - 1, восстанавливают нейтральное состояние, формируя на выходах логические сигналы «О, по которым блок 11 формирует команды переключателям 20 К-х ступеней, К 1, N+1 подключающие блоки 19 К-х ступеней на дополнительные входы пусковой аппаратуры 3 (К-1)-х ступеней, чем обеспечивается регулирование подпора hj. и Нк на входах К-х ступеней за счет плавного регулирования оборотов привода (К-1)-х ступеней, , N с нормальным режимом пуска. С восстановлением пускового режима на N-ой ступени на входе порогового элемента 10 устраняется условие AHj, и выполняется условие AHj H/v , в результате на его выходе формируется логический сигнал «О, по которому блок 11 сигнализирует в блок 21 о восстановлении пускового режима на последней перекачной ступени.
Таким образом, устройство реагирует на любые возможные ситуации нарущения режима пуска, обеспечивая надежный автоматический пуск и контроль пускового режима многоступенчатых гидротранспортных трубопроводов с предупреждением развития закупорок и недопустимых колебаний подпоров, приводящих к срыву режимов перекачных ступеней и кавитационных режимов.
Использование предлагаемого устройства приводит к повышению надежности пусковых режимов гидротранспортных трубопроводов, увеличивает производительность гидроустановок из-за ликвидации простоев по причине пуска, снижает, количество повторных включений насосных агрегатов и, вследствие этого, - их износ, а также накапливающиеся последствия возможных при этом гидроударов, тем самым сокращает материальные и трудовые затраты на разбутовку трубопроводов при закупорках и на замену труб при
порывах от повышения давления при закупорках. Кроме того, исключение закупорок трубопровода позволяет снизить дополнительно капитальные затраты на строительство больших резервуаров для технической воды, необходимой при длительных промывках трубопровода больщой протяженности и подготовке его к пуску.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и регулирования установки трубопроводного транспорта | 1980 |
|
SU925816A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Устройство для регулирования уровня жидкости в емкости | 1978 |
|
SU723527A1 |
| Устройство автоматического согласо-ВАНия и КОНТРОля РЕжиМОВ МНОгОСТупЕН-чАТыХ НАСОСНыХ и гидРОТРАНСпОРТНыХуСТАНОВОК | 1979 |
|
SU819011A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Устройство автоматического обнаружения неисправностей приводного регулирующего органа транспортного трубопровода | 1980 |
|
SU922002A1 |
| СПОСОБ ОЧИСТКИ ЛИНЕЙНОЙ ЧАСТИ УГЛЕПРОВОДА | 1996 |
|
RU2102163C1 |
| Устройство для определения ресурса машин | 1981 |
|
SU1005115A1 |
| Система автоматического контроля технологических параметров земснаряда "грунт | 1983 |
|
SU1105566A1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДАМИ НАСОСИ Б1Х АГРЕГАТОВ МНОГОСТУПЕНЧАТОЙГИДРОТРАНСПОРТНОЙ ТРУБОПРОВОДНО Й УСТАНОВКИ, содержащее для каждой ступени трубопровода программный блок, связанный с пусковой аппаратурой насосного агрегата, датчик расхода гидросмеси и датчик перепада давления на участке трубопровода и формирователь сигнала, пропорционального допустимому перепаду давления, подключенный входом к датчику расхода, а выходом - к одному из входов элемента сравнения, другой вход которого соединен с датчиком аерепада давления, а выход - с входом порогового элемента, отличающееся тем, что, с целью повышения надежности, оно снабжено анализирующим блоком и подключенными к одним его входам для каждой ступени трубопровода дополнительными пороговыми элементами, соединенными со входами последних дополнительными элементами сравнения, подключенными к выходу одного из них блоком обратных связей, переключателем обратных связей, подключенный одним из входов к выходу последнего, датчиком и задатчиком подпора, подключенными к входам одного из дополнительных элементов сравнения, при этом входы других элементов сравнения подключены к датчикам расхода собственной и последующей ступеней, и блоком переключения прямых связей, выходы которого подключены к входам программного блока, а первый, второй и третий входы - соответственно к выходам датчиков расхода собственной и последующей ступеней и одному из выходов анализирующего блока, другие выходы которого связаны с другим & входом соответствующего переключателя обратных связей, при этом выходы переключателя обратных связей подключены к пусковой аппаратуре насосных агрегатов собственной и предыдущей ступеней. 2. Устройство по п. 1, отличающееся тем, что анализирующий блок содержит регистры, подключенные к их выходам дешифратор и коммутирующий узел на выходе последнего и распределитель импульсов с генератором тактовых импульсов, подключенным к его управляющему входу, сигнальные входы которого,, объединены с входами регистОС ров и являются входами блока,один из высо ходов распределителя соединен с входами записи регистра, другие - с входами коммутирующего узла, выходы которого являются выходами блока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля и регулирования установки трубопроводного транспорта | 1980 |
|
SU925816A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
