ри транспортной способности потока на участках безнапорного желоба.
При колебаниях уровня жидкой и твердой фаз в желобе, а также при изменении состава транспортируемой гидросмеси изменяется скорость и время движения потока по участку транспортного желоба, что приводит к расстройке звеньев запаздывания, у которых время задержки сигнала по тракту передачи рассчитано для номинальной скорости движения потока гидросмеси с номинальным составом. Это обстоятельство приводит к значительным погрешностям воспроизведения режима участка на выходе звеньев запаздывания по начальному режиму участка желобчатого става и к погрешностям в распознавании аварийных ситуаций и ликвидации забутовок желобов и утечек.
Цель изобретения - повышение точности контроля и регулирования режима безнапорногс гидротранспорта при широком диапазоне распределенных возмуш,ений и, как следствие, повышение производительности за счет упреждения и предотврашения аварийных ситуаций и устранения простоев.
Постакленная цель достигается тем, что устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта по авт. св. № 787311 снабжено датчиками текущих уровней на контролируемых участках дополнительными элементами сравнения,пороговыми элементами, блоками памяти, блоками вычисления транспортного запаздывания и блоками вычисления требуемых значений уровней жидкой фазы на участках трубопровода по содержанию твердой фазы в потоке, входы которых подключены к выходам датчиков веса соответствуюШ.ИХ участков, а выходы - к одним из входов дополнительных элементов сравнения, другие входы которых подключены к выходам датчиков текуших уровней на этих же участках, а выходы элементов сравнения через дополнительные пороговые элементы подключены автономными каналами к дополнительным входам исполнитель:г ых механизмов управляемого органа подачи воды и к одним из входов блоков памяти, выходы которых подключены к корректируюш,им входам звеньев запаздывания своих участков, а другие входы блоков памяти подключены к выходам блоков вычисления запаздывания, которые входами соединены с выходами датчиков веса и уровней же участков.
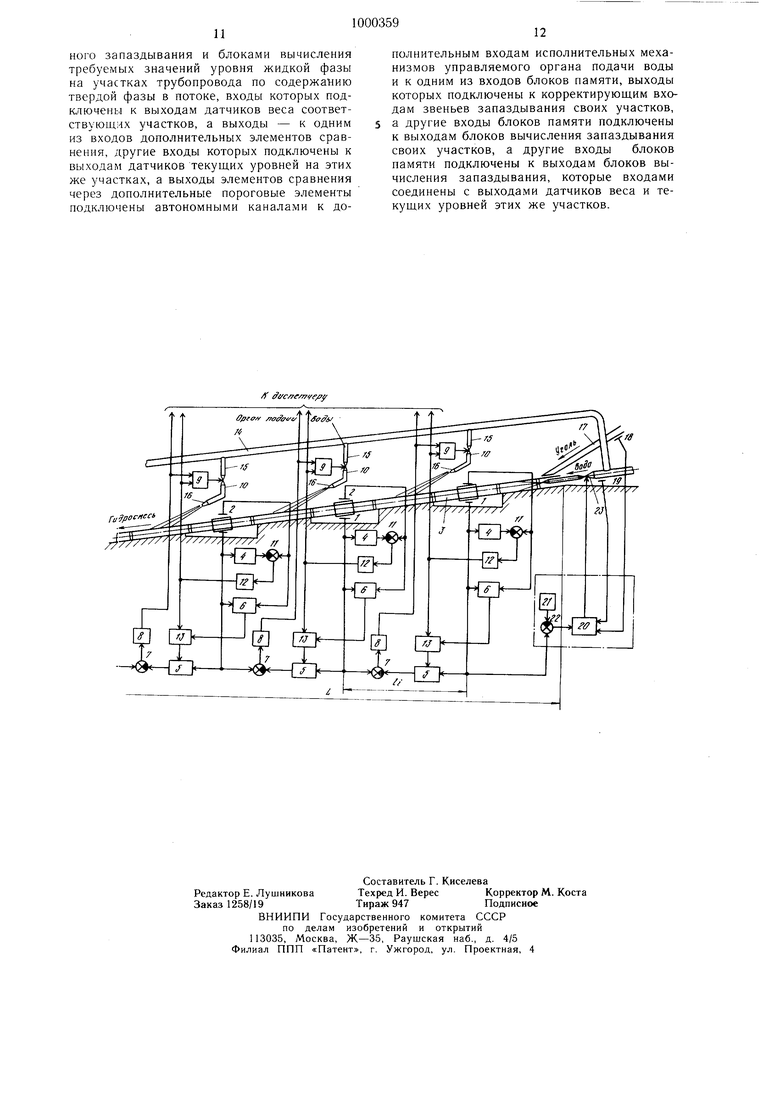
На чертеже изображена блок-схема предлагае1лого устройства.
Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта включает в себя объемно-весовые датчики, содержаш.ие датчики 1 веса (плотности) и датчики 2 текущих уровней (объемов) гидросмеси в контрольных лотках заданной базы датчиков, установленные на входе и выходе каждого контролируемого 1-го участка длиной 1 трубопровода (желоба) 3. Число контролируемых участков определяется таким образом, чтобы охватить одновременно для контроля транспортный режим по всей
длине желоба безнапорного гидротранспорта, как объекта с распределенными параметрами и распределенными возмущениями, и возможностью достоверной распознаваемости аварийных ситуаций и восстановления транспортного режима при его нарушениях. Выходы датчиков 1 веса, установленных в начале контролируемого i-ro участка, подключены к основным входам соответствующих блоков 4 вычисления требуемых (расчетных) значений уровней
жидкой фазы в желобах участков по содержанию твердой фазы в потоке, звеньев 5 запаздывания (линии задержки) для задержки выходных сигналов датчиков 1 на время движения Tj элементарного контрольного объема гидросмеси по длине i-ro участка и к первым входам блоков 6 вычисления транспортного запаздывания t по величине действительной плотности (веса) и уровней потока на i-м участке. Выходы звеньев 5 запаздывания i-ro участка подключены к первым входам элементов 7 сравнения соответствующих участков, вторые входы которых соединены с выходами датчиков 1 веса, установленных в конце i-ro участка, являющиеся одновременно и начальными для i + 1-го участка. Выходы элементов 7
0 сравнения i-ro участка через пороговые элементы 8 основными автономными каналами подключены к основным входам исполнительных механизмов 9, управляющих регулировочными задвижками 10 органа для подачи воды в желобы i-ro участка транспортнои системы.
Датчики 2 текущих уровней гидрос.меси в начале i-ro участка своими выходами подключены к первым входам дополнительных
0 элементов 11 сравнения и к вторым входам блоков 6 вычисления транспортного запаздывания соответствующих участков. Вторые входы элементов 11 сравнения соединены с выходами блоков 4 вычисления требуемых значений уровней в желобе i-ro, а выходы через дополнительные пороговые элементы 12 подключены дополнительными автономными каналами к дополнительным входам исполнительных механизмов 9. Блоки 13 памяти для приема и хранения вычисQ ленных значений транспортного запаздывания Т; для i-ro участка своими первым и вторым входами подключены соответственно к выходам пороговых элементов 12 и блоков 6, а выходами - к корректирующим входам звеньев 5 запаздывания соответствующих участков.
Орган подачи воды выполнен распределенным по всей длине безнапорного желоба или трубопровода в виде подключенных к напорному водопроводу 14 участковых патрубков 15 с насадками 16 для формирования струи и регулировочными задв)1жками 10.
На чертеже показаны также желоб 17 для подачи твердого материала (угля) в систему транспорта, датчики 18 и 19 веса твердого материала и расхода воды, выходы которых подключены к входам стабилизирующего регулятора 20 начальной плотности (соотношения твердого к жидкому - Т:Ж) вырабатывающего сигнал для подготовки гидросмеси с плотностью, равной по установке, выдаваемой задатчиком 21, выход которого подключен к первому входу элемента 22 сравнения, второй вход которого соединен с выходом датчика 1 веса, установленного в начале головного участка безнапорного трубопровода, и входом звена 5 запаздывания этого участка. Выход элемента 22 сравнения подключен к одному из входов регулятора 20, выход которого управляет органом 23 подачи дозирования воды на входе в трубопровод. Задатчик 21 и элемент 22 сравнения образуют корректирующий регулятор.
Реализация узлов предлагаемого устройства, кроме объемно-весового датчика и исполнительных механизмов, выполнена на стандартных интегральных микросхемах серии К140, К155, транзисторах типа КП103Е и диодах типа Д2Б. Так, элементы 7 и 11 сравнения и пороговые элементы 8 и 12 выполнены на операционных усилителях (ОУ) типа К1УТ401Б. Блоки 4 вычисления требуемых значений уровней выполнены по схеме функциональных преобразователей (ФП), построенные на ОУК1УТ401Б, в цепях обратных связей которых использованы преобразователи, выполненные на диодах Д2Б. Блоки 6 вычисления транспортного запаздывания построены по схеме ФП на элементах К1УТ401Б и Д2Б, выходы которых нагружены на управляемые делители, выполненные на ОУ К1УТ401Б и КП103Е. Для коррекции вычисленных значений tj в зависимости от веса (плотности) гидросмеси на управляющие входы делителей поданы выходные сигналы датчиков веса. Выходные сигналы делителей преобразуются аналогоцифровыми преобразователями (АЦП) в однобайтовый выход (код), выражающий в цифровой форме численное значение вычисленного запаздывания Tj . АЦП построено по схеме с компенсационным интегрированием с использованием интегратора, компаратора нулевого уровня, выполненных на ОУ К1УТ401Б, и двоичных счетчиков со схемой управления электронным ключом входных цепей интегратора, выполненных на элементах К 155ИЕ и КП103Е. Точность воспроизведения блоками 4 и 6 реальных значений уровня и времени запаздывания порядка 1,5-2,5%. Блоки 13 памяти построены на регистрах с параллельным вводом и выводом однобайтовой информации с использованием элементов К155ИР. Звенья 5 запаздывания построены по схемам
динамических запоминающих устройств (ДЗУ), в которых обеспечивается слежение за амплитудой сигналов датчиков веса и последующее хранение (запоминание) текущего значения этого сигнала по команде, 5 приходящей от двоичных счетчиков. ДЗУ выполнено на ОУ К1УТ401Б, счетчики - на К155ИЕ. Время восстановления начального состояния счетчика совпадает с временем запаздывания и определяется модулем счета, который может перестраиваться в зави0 симости от значения кода, занесенного в регистры блоков 13 с блоков 6. Подключение выходов ДЗУ к схеме сравнения 7 осуществляется коммутатором, выполненным по схеме распределителя импульсов на
К155ИЕ, с частотой, достаточной для воспроизведения процесса на участке по выботкам сигнала датчика веса, хранимых в ДЗУ.
Устройство монтируется в виде отдель-.
0 ного блока, устанавливаемого в пункте узла подготовки гидросмеси, и сопрягается с регулятором соотнощения твердой и жидкой фаз для формирования гидросмеси с расчетной (заданной) плотностью на входе в транспортный трубопровод.
Устройство работает следующим образом. Нормальный режим по плотности гидросмеси на выходе узла подготовки формируется регулятором 20, задающим соотнощения Т:Ж дозированием воды регулирую0 щим органом 23 по уставке, выдаваемой задатчиком 21, и сигналами датчика 18 веса твердого материала, поступающего по желобу 17 из забоя или бункера, и датчика 19 расходы воды на входе в транспортный трубопровод.
5 Однако транспортный режим на последующих участках безнапорного желоба или трубопровода как распределенной системы определяется местной консистенцией (плотностью), уровнем воды в трубопроводе (желобе), транспортной скоростью, крупностью твердого материала в гидросмеси и может оказаться критическим, тогда на других участках будет сохраняться нормальный режим. Поэтому при сохранении исправного состояния секций при нормальном режиме
5 (отсутствие утечек, местных сгущений и закупорок) транспортный режим каждого i-ro участка определяется автоматически по сигналу с объемно-весового датчика (датчики веса и уровня) в начале i-ro участка и воспроизведения его на выходе соответствующего звена запаздывания по истечении времени Т; , равного времени движения гидросмеси по трубопроводу (желобу) от начального сечения к конечному сечению контролируемого i-ro участка.
В нормальном режиме сигнала от датчиков 1 веса, расположенных в начале каждого контролируемого i-ro участка длиной, поступают на основные входы соответствующих блоков 4 вычисления требуемых значеНИИ ypoEiHH В трубопроводе (желобе), звеньев 5 запаздывания и первые входы блоков 6 вычисления транспортного запаздывания. По текущим сигналам датчиков 1 веса на выходах блоков 4 формируются сигналы, пропорцион.альные требуемым значениям уровней гидросмеси номинального состава в желобах i-к участков, поступающие на первые входы элементов 11 сравнения. Одновременно на вторые входы соответствующих элементов 11 сравнения и блоков б вычисления транспортного запаздывания с выходов датчиков 2 уровня поступают сигналы, пропорциональные действительному уровню гидросмеси в желобе i-ro участка. По расчетным и текуш.им значениям сигналов уровня на выходах элементов 11 сравнения формируются сигналы рассогласования, которые для нормального режима находятся в зоне нечувствительности (порога срабатывания) пороговых элементов 12, поэтому исполнительные механизмы 9, связанные с ними дополнительными автономными каналами, отключены. В блоках 6 по текущим значениям сигналов объемно-весовых датчиков 1 и 2 вычисляются значения транспортного запаздывания; i-ro участка, передаваемые по однобайтовым выходам в виде цифрового кода в блоки 13 памяти, в которых вычисленные значения 1 запоминаются и являются уставк ми, выдаваемые по корректирующим однобайтовым выходам в звенья 5 запаздывания. По истечении времени tj значения сигналов, соответствующих режиму в конце i-ro участка, появятся на выходах датчиков 1 расположенных в конце i-ro участка, являющиеся одновременно и начальными для i + 1 - го участка, и на выходах звеньев 5 запаздывания этих же участков. При правильном расчете с допустимой погрешностью величины t для i-ro участка в номинальном режиме значения сигналов, поступающих с выходов звеньев 5 запаздывания и рюнцевых датчиков 1 соответственно на первый и второй выходы элементов 7 сравнения, будут одинаковыми в пределах ошибки воспроизведения режима на этом участке. В этом случае на выходах элементов 7 сравнения сигнал рассогласования действительного и воспроизводимого звеньями запаздывания режимов будут отсутствовать, а исполнительные механизмы 9, связанные основными автономными каналами через пороговые элементы 8 с выходами элементов 7 сравнения, будут отключены. При сохранении рабочего состояния трубопровода (желобов) всякие изменения режима в начале i-ro участка, сказывающиеся в конце этого участка через время запаздывания { (время движения гидросмеси на i-M участке), будут воспроизведены звеном запаздь.шания, так что, по-прежнему, на выходах элементов 7 и 11 сигналы рассогласования будут находиться в зоне нечувствительности соответствующих пороговых элементов 8 и 12, поэтому сигналы на их выходах будут отсутствовать и исполнительные механизмы 9 будут отключены.
В случае появления закупорки (забутовки) трубопровода (желоба) 3 или утечки жидкости из-за рассытковки секций по длине
i-ro контролируемого участка, в начальном сечении i-ro участка будет сохраняться нормальный режим (до полной забутовки всего i-ro участка), а в конце 1-го участка движение гидросмеси будет либо отсутствовать,
„ либо текущий вес контрольного объема проходящей гидросмеси будет резко отличаться (уменьщаться) от веса контрольного объема гидросмеси в начале i-ro участка. Поскольку звено 5 запаздывания на выходе будет воспроизводить через время Tj нормальный режим, существующий на входе участка, то величины сигналов от датчиков 1 веса в конце участка, соответствующие нарущенному режиму, и с выхода звена 5, соответствующие нормальному режиму, если бы он сохранился, будут резко отличаться и на выходе элемента 7 сравнения появится сигнал рассогласования, превышающий порог срабатывания порогового элемента 8. Срабатывая, пороговый элемент 8 включает по основному входу исполнительный механизм 9, управляющий задвижкой 10 участкового патрубка 15 с насадкой 16, увеличивая подачу воды из водопровода 14 непосредственно в трубопровод (желоб) для размыва струей жидкости забученного участка. Одновременно с включением исполнитель0 ного механизма вырабатываются сигналы диспетчеру с указанием места (номера участка) забутовки или утечки.
При неравномерном распределении твердого материала в потоке, изменения состава и удельного веса твердого материала -происходит отставание твердой от жидкой фазы в местах с больщей плотностью потока, крупностью и весом частиц с возможностью местного сгущения гидросмеси, скопления твер0 дого материала и образованием забутовки i-ro участка из-за недостаточного значения скорости потока, зависящей от уровня жидкости в трубопроводе (желобе) для данного местного значения содержания твердого материала и его веса в потоке на i-м участке.
5 В этом случае в блоке 4 по сигналам от датчика 1 веса вычисляется требуемое значение уровня гидросмеси для сохранения транспортной способности безнапорного потока в трубопроводе (желобе) при данном .. содержании твердого материала. Выходные сигналы блоков 4 сравниваются в элементах 11 сравнения с сигналами текущих значений уровней, поступающих от датчиков 2 уровней. При этом на выходе элемента И сравнения формируется сигнал, пропорциональный отклонению текущего уровня в трубопроводе (желобе) от расчетного для данного содержания твердого материала в потоке гидросмеси i-ro участка, который превышает порог срабатывания соответствующего порогового элемента 12. Последний, срабатывая, дополнительным автономным каналом включает исполнительный механизм 9 для увеличения подачи воды через патрубок 15 и повышения уровня до расчетного значения, обеспечивающего транспортную способность потока при данном содержании твердого. Одновременно пороговый элемент 12 подает сигнал в блок .13 памяти, подготавливая его к приему новой информации, поступающей по однобайтовому входу с выхода блока 6, и формирует сигнализацию диспетчеру о нарущении нормального режима в трубопроводе (желобе) с указанием номера участка.
С одновременным изменением уровней, определяющих скорость и время движения гидросмеси, от начала к концу i-ro участка, сигналы от датчиков 1 и 2 текущих (действительных) веса и уровня подаются на соответствующие входы блоков 6, вычисляющие величину транспортного запаздывания Т| по величине действительного уровня на i-M участке трубопровода (желоба) и содержания твердого материала в транспортном потоке. Информация о вычисленных значениях транспортного запаздывания tj по однобайтовому выходу с блоком 6 поступает на соответствующие входы блоков 13 памяти, где запоминается.
По достижении уровнем на i-м участке расчетного значения сигналы рассогласования на выходах элементов 11 сравнения устанавливаются по величине, не превышающие зону нечувствительности пороговых элементов 12, в результате чего они отключаются, выключая исполнительные механизмы 9, которые прекращают подачу воды на участки трубопровода (желоба). Одновременно на выходах пороговых элементов 12 формируются сигнализация диспетчеру о восстановлении нормального транспортного режима на участках и сигналы в блоки 13 памяти, по которым хранимая в них новая информация о вычисленных значениях транспортного запаздывания по корректирующим однобайтовым входам передается в звенья 5 запаздывания, перестраивая величину транспортного запаздывания. Этим самым осуществляется непрерывная подстройка звеньев 5 запаздывания под объект при любом изменении его режима, обусловленном неравномерным распределением твердых частиц в потоке, изменением состава и веса твердого материала, местным сгущением гидросмеси на участках трубопровода и т.п.
При нарущении режима в начале головного участка безнапорного трубопровода (желоба), когда действительная плотность гидросмеси в начале трубопровода превыщает плотность, соответствующую оптимальному соотношению Т:Ж, формируемую регулятором 20, на корректирующий вход элемента 22 сравнения от датчика 1 веса в начальном сечении головного участка поступает сигнал, уровень которого превышает
значение уставки, выдаваемой задатчиком 21. При этом на выходе элемента 22 сравнения появляется сигнал изменения задания стабилизирующему регулятору на определенную величину, определяемую отклонением 5 действительного веса (плотности) от веса (плотности) задаваемого уставкой, и дозирование воды в транспортную систему на ее входе осуществляется уже не по сигналу уставки оптимального отнощения Т:Ж, а по сигналу датчика 1 в начале головного участ® ка, фиксирующего текущий вес (плотность) гидросмеси.
Таким образом, устройство выполняет не только функции контроля транспортного режима и его восстановления в местах нару5 шений по длине безнапорного трубопровода (желоба) за узлом пульпоподготовки, но и через корректирующую связь непосредственно корректирует работу стабилизирующего регулятора формирования гидросмеси на входе в транспортный трубопровод.
0 Использование предлагаемого устройства позволит значительно уменьщить погрешность воспроизведения, транспортного режима и повысить точность регулирования, поскольку режим по требуемому уровню сохраняет ;я независимо от складывающихся си5туаций на участках, скопления твердого материала, его распределения по длине, изменения состава, веса твердого материала и т.п. Причем любое изменение режима по уровню (скорости потока) приводит к не0 прерывной настройке звеньев запаздывания на данный режим, обеспечивая высокую точность воспроизведения текущих режимов звеньями запаздывания и высокую точность контроля и регулирования. Все это увеличивает достоверность распознавания ситуа5 ций, возникающих при эксплуатации безнапорного гидротранспорта, повыщает надежность транспортного режима, обеспечивает предупреждение образования забутовок трубопровода и обнаружение мест утечек гидросмеси при нарушениях стыковки
0 секций трубопровода, что позволяет транспортировать на каждом участке гидросмеси с предельной по условиям транспортирования плотностью и значительно повысить производительность системы по транспортируе5 мому твердому материалу, а также уменьшить время ее простоев по причине аварийных ситуаций.
Формула изобретения
Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта по авт. св. № 787311, отличающееся тем, что, с целью повышения точности контроля и регулирования транспортного режима, оно снабжено датчиками текущих уровней на контролируемых участках, дополнительными элементами сравнения и пороговыми элементами, блоками памяти, блоками вычисления транспортного запаздывания и блоками вычисления требуемых значений уровня жидкой фазы на участках трубопровода по содержанию твердой фазы в потоке, входы которых подключены к выходам датчиков веса соответствующих участков, а выходы - к одним из входов дополнительных элементов сравнения, другие входы которых подключены к выходам датчиков текущих уровней на этих же участках, а выходы элементов сравнения через дополнительные пороговые элементы подключены автономными каналами к до9полнительным входам исполнительных механизмов управляемого органа подачи воды и к одним из входов блоков памяти, выходы которых подключены к корректирующим входам звеньев запаздывания своих участков, а другие входы блоков памяти подключены к выходам блоков вычисления запаздывания своих участков, а другие входы блоков памяти подключены к выходам блоков вычисления запаздывания, которые входами соединены с выходами датчиков веса и текущих уровней этих же участков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1979 |
|
SU787311A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Устройство автоматического обнаружения неисправностей приводного регулирующего органа транспортного трубопровода | 1980 |
|
SU922002A1 |
| Устройство для сгущения и регулирования плотности транспортируемой по трубопроводам гидросмеси | 1981 |
|
SU998261A2 |
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| Устройство для управления водоснабжением участка гидрошахты | 1985 |
|
SU1275376A2 |
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| Устройство для регулирования уровня жидкости в емкости | 1978 |
|
SU723527A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1977 |
|
SU676515A1 |
| Устройство для контроля и регулирования установки трубопроводного транспорта | 1980 |
|
SU925816A1 |