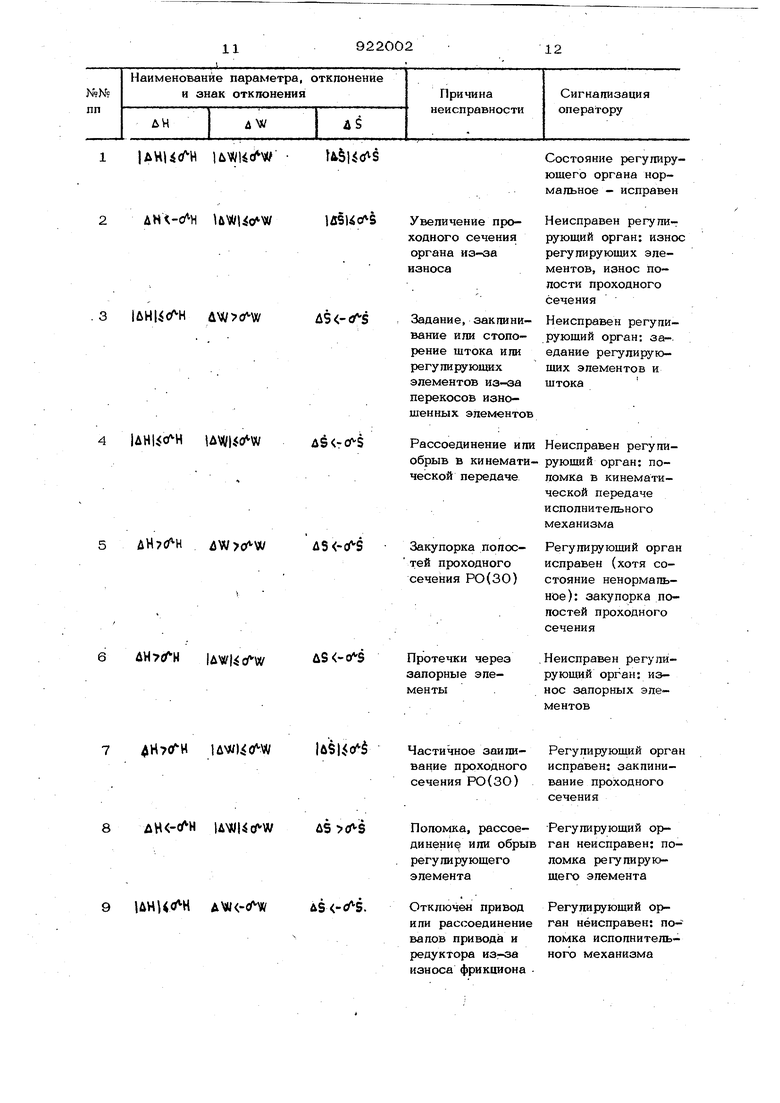
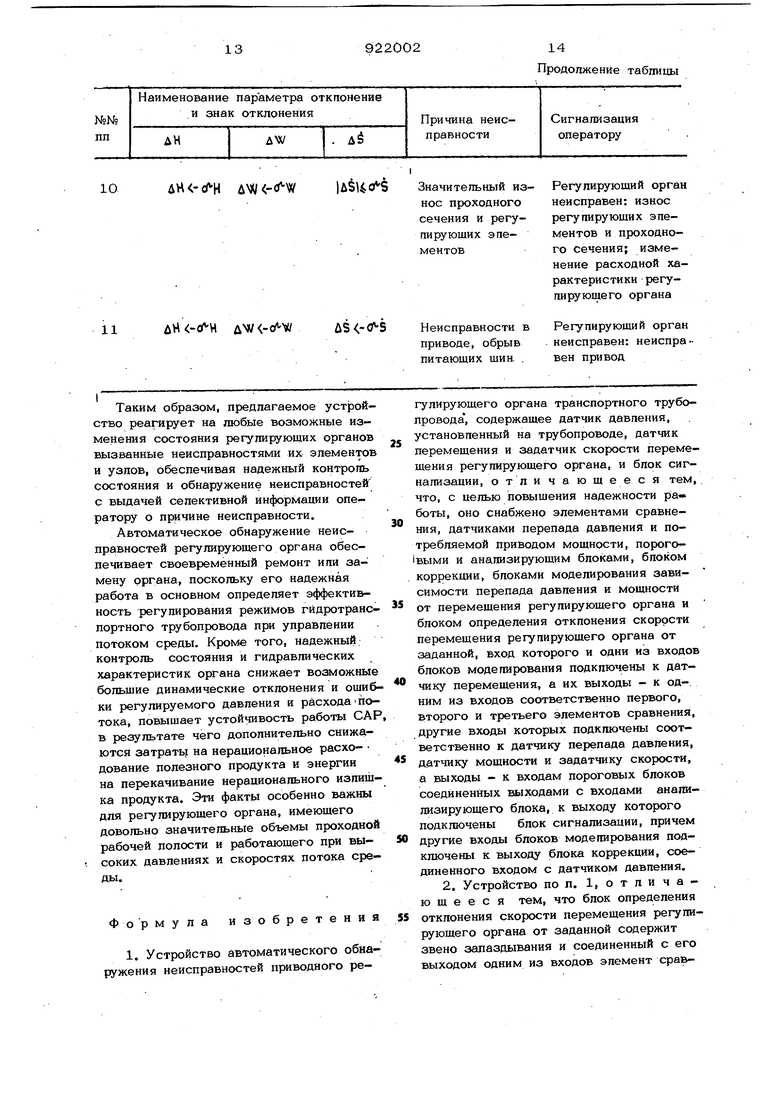
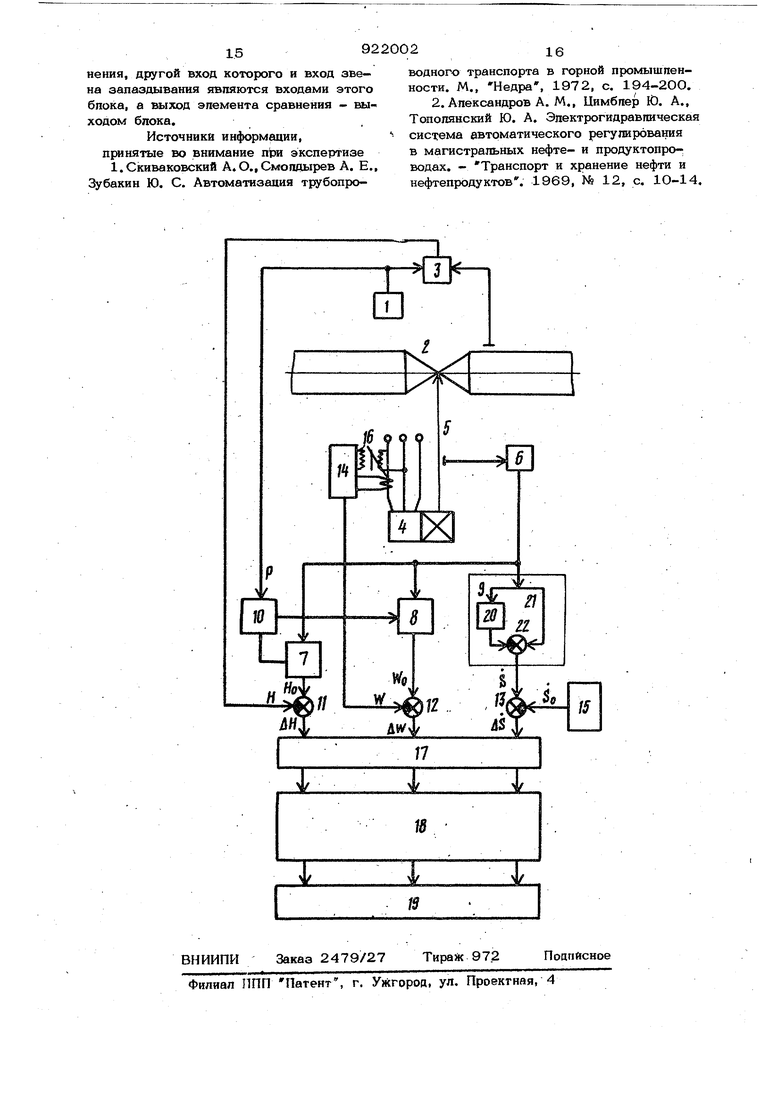
(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ ПРИВОДНОГО РЕГУЛИРУЮЩЕГО ОРГАНА ТРАНСПОРТНОГО ТРУБОПРОВОДА Изобретение относится к трубопроводному транспорту, а именно к устройству . автоматического обнаружения неисправностей приводного регулирующего органа транспортного трубопровода, и может : быть использовано дпч автоматического контроля состояния и обнаружения неисправностей регутшрующего органа транспортного трубопровода, работающего на воде, гидросмеси, нефти и агрессивных .средах. Известны устройства контроля положений регулирующих и запорных органов, включенных в cxeiyty автоматизации угле- сосной станции, содержащие кониеш 1е выключатели открытия и закрытия задвижек и щиберОв на всасывающем и нагнетательном трубопроводах, соединенные че рез контакты исполнительных реле с вход ными- цепями программного реле времени контакть которого коммутируют входные цепи пусковых устройств исполнитель ных механизмов регулирующих шиберов и двигателей углесосов l. Однако эти устройства, контролируя тблько крайние положения регулирующего органа, не обеспечивают обнаружения неисправностей в приводе, а также иэнос или заиление регулирующего oprai : что приводит к неэффективн ж1у использованию его в системах регулирования изза больших динамических отклонений регулируемых параметров (давиения и расхода) и к потере устойчивости, особенно в зоне глубокого дросселирования. Известно также устройство автоматического обнаружения неисправностей приводного регулирующего органа транспорт-ного трубопровода, содержащее датчик давления, установленный на трубопроводе датчик перемещения, задатчик скорости перемещения регулирующего органа и блок сигнализации 2. Однако устройство не обеспечивает; возможность обнаружения неисправностей в приводе регулирующего органа; обиа-ружение отклонения скорости перемещения органа от заданной при заилении и закупорке рабочей попости (проходных сечений) ор гана, попадании твердых частиц в зазоры и направляющие пазы регулирующего органа, при заклинивании; контроль гидрав лических характеристик и обнаружение недопустимого изменения расходной (пропускной) характеристики регулирующего органа при износах, коррозии, повреждениях. Цель изобретения - повышение надежности работы. Поставленная цепь достигается тем, что устройство снабжено элементами сравнения, датчиками перепада давления и потребляемой приводом мощности, поро говыма и анализирующим блоками, блоком коррекции, блоками моделирования зависимости перепада давления и мощности от перемещения регупирующего органа и блоком определения отклонения скорости перемещения-регулирующего органа от заданной, вход которого и одни из входов блоков моделирования подключены к датчику перемещения, а их выходы - к одним иэ входов соответственно первого, второго и третьего элементов сравне ния, другие входы которых подключены соответственно к датчику перепада давления, датчику мощности и задатчику скорости, а выходы - к входам пороговых блоков, .соединенных выходами с вхо дами анализирующего блока, к выходу ко торого подключен блок сигнализации, при чем другие входы блоков моделирования подключены к выходу блока коррекции, соединенного входом с датчиком давления. При этом блок определения отклонения скорости перемещения регулирующего органа от заданной содержит звено запаздывания и соединенный с его выходом одним из входов элемент сравнения, другой вход которого и вход звена запаздывания являются входами этого блока, а выход элемента сравнения - выходом блока. На чертеже изображена блок-схема предлагаемого устройства. Устройство содержит датчик 1 текущего давления Р расходной среды (вода, гидросмесь, нефть, пар, химпродукты и т. п.), установленный перед регулирующим органом 2, датчик. 3 текущего перепада давления Н на органе 2, одним входом соединенный с выходом датчика 1 давления, привод 4 с исполнительным ме ханизмом (показан электрический исполнительный механизм), преобразующий энергию в перестановочное усилие, необ ходимое для перемещения штока 5 органа 2, преобразуемое последним в изменение расхода среды. На щтоке 5 установлен датчик 6 текущего перемещения S штока, контролирующий наличие перемещения органа 2 при включенном приводе 4. Выход датчика 6 перемещения соединен с одними из входов блоков 7 и 8 моделирования, моделирующих соответственно зависимости перепада давления Н о на органе 2 и потребляемой мощности VVo приводом 4 от величины перемещения щтока 5 при исправном органе 2 и приводе 4, и входом блока 9 определения (обнаружения) отклонения скорости 5 перемещения органа 2 от заданной. Другие входы блоков 7 и 8 подключены соответственно к первому и второму выходам блока 1О коррекции, корректирующего модельные характеристики перепада давления HQ на органе 2 и потребляемой мощности )Уо приводом 4 в зависимости от общего давления Р в трубопроводе перед органом 2, а вход блока 1О подключен к выходу датчика 1 давления. Выходы блоков 7-9 подключены к первым входам соответственно элементов 11-13 сра внения, вторые входы которых подключены к выходам датчика 3 перепада давления, датчика 14 действительной потребляемой мощности W приводом 4 и задатчика 15 скорости SQ перемещения щтока органа 2 при включенном приводе 4, Датчик 14 мощности входами подключен к выходам трансформаторов 16 тока и напряжения, установленным на щйнах питающих напряжений пусковой аппаратуры привода 4. Элементы 11-13 сравнения своими выходами через соответствующие входы пороговых блоков 17, формирующих сигналы логических уровней О или °1 по сигналам отклонений Д Н, Д W и д5о ,с учетом знака.отклонения, подключен к соответствующим входам анализирующего блока 18 распознавания неисправностей, который выходами подключен к входам блока 19 сигнализации. Блок 9. вь1полнен параллельным включением звена 2О запаздывания (задержки) и. прямого канала 21 (прямая цепь), которые соединены с выходом датчика 6 перемещения, а выходами - с соответствующими, входами четвертого элемента 22 сравнения, выходом подключенного к первому входу элемента 13 сравнения. Реализация узлов предлагаемого устройства, кроме типовых узлов пусковой аппаратуры привода, датчиков давления. 59 перепада цаепопия и мощности, выпопиена на интегральных микросхемах серии К14О, К155, транзистора типа КП1ОЗЕ и диодах типа Д2Б. Так, элементы срав нения 11-13 и 22 выполнены на операционных условиях (ОУ) типа К1УТ401Б. Блок 10 корр(гкции выполнен по схеме двухканального линейного усилителя с перестраиваемым коэффициентом передачи и реализован на ОУ типа К1УТ401Б и транзисторах КП103Е. Блоки 7 и 8 построены по схеме функциональных преобразователей, выходы которых нагружены на умножители сигналов. Для корректировк.и модельных характеристик в зави- is симости от давления на управляющие входы умножителей поданы выходные сигналы блока коррекции. Функциональные преобразователи построены на ОУ К1УТ4Ь1Б в цепях обратной связи которых использованы преобразователи, выполненные на диодах Д2Б, Умножители сигналов выполнены по схеме сравнивающего устройства на ОУ К1УТ4О1Б, в цепях обратной связи которых включены управляемые де- лители на полевых транзисторах КП1ОЗЕ Точность воспроизведения моделями реальных характеристик порядка 1,5-2%, Пороговые блоки 17 построены на двухпороговых амплитудных дискриминаторах с использованием элементов К1УТ4О1Б и диодов Д2Б и дешифраторах логических уровней сигналов, собранных на. логических элементах типа К1ЛБ553.-Анализирующий блок 18 реализован на логических элементах серии К155 по схеме ком бинационного автомата, управляемого двоичными выходными сигналами от пороговых блоков. Выходы комбинационного автомата через PS -триггеры сопрягаются с входными цепями блока сигнали зации. Звено 20 запаздывания построено в виде набора элементов памяти по схеме динамического запоминающего устройства (ДЗУ), в котором обеспечивается слежение за амплитудой выходного сигна ла датчика перемещения и последующего хранения текущего значения этого сигнала по команде, приходящей от двоичных счетчиков. ДЗУ вьшолнено на элементах К1УТ401Б,счетшки-на К155ИЕ5. Подключение выходов ДЗУ к схеме 22 сравнения осуществляется коммутатором, выполненным по схеме распределителя им.пульсов на К155ИЕ5. Устройство выполняется в виде отдел ного блока и устанавливается в аппаратном отделении, где сопрягается через 02 согпасуршие входные элементы с соответствующими датчиками. Предлаг-аемое устройство работает следующим образом. Нормальное рабочее состояние регулирующего органа 2 характеризуется rfcnравным регулирующим элементом , исправным проходным сечением, исправным приводом. В случае нормального режима при включенном приводе 4 на выходе датчика 6 перемещения формируется сигнал, пропорциональный текущему перемещению S(t) штока 5 при нормальном рабочем состоянии органа 2, который поступает на блок 9 обнаружения отклонения скорости перемещения органа 2 от заданной. В блоке 9 сигнал ) разветвляясь, поступает одновременно на выходы звена 20 запаздывания и прямого канала 21 для выявления величины и знака приращения uS(.t) перемещения щтока 5 и, следовательно, органа 2 на расчетном интервале времени, равном i. Интервал численно равен больщему из всех расчетных интервалов времени необходимого для изменения значения параметров давления, перепада давления, или мощности на допустимую величину, превыщающую порог нечувствительности измерительных каналов давления, перепада давления и мощности. Далее сигналы текущего перемещения 5(.t) и сдвинутого на расчетный интер- . вал времени ) с выхода звена запаздывания поступают на соответствующие входы четвертого элемента 22 сравнения, на выходе которого формируется сигнал приращения uS(-iSj текущего перемещения SCt) от перемещения 5(i-t), который имел место на выходе блока 9 до начала движения щтока 5, т.е. AS(t)s )-5(t-T:). Вследствие постоянства интервала для приводов с постоянной скоростью исполнения величина приращения хода лВСЪ) щтока на расчетном интервале времени ilfeOOnSt также постоянная, т.е. uStC) C.,4To равносильно неизменноЬти скорости перемещения и пропорциональности ее приращению хода щтока, т.е. S(.t) К u5 Culsconsfe ,где К| s -} /Т коэффициент пропорциональности. Таким образом, любые отклонения скорости перемещения регулирующего органа от заданной соответствуют различным значениям приращения uStt) хода щтока и свидетельствуют о нарушениях в приводе 4 и неисправности органа 2. Поэтому формируемый на выходе блока 9 сигмал, пропорциональный приращению ) является в то же время сигналом, пропо циональным текущей скорости S(t) перемещения РО(ЗО). Использование такого способа определения скорости перемеще- ни я кинематической передачи органа 2 значительно повыщает точность работы устройства и его помехозащищенность в режиме диагностического контроля. Одновременно сигнал от датчика 6 пе ремешения подается на основные входы блоков 7 и 8 моделирования, воспроизво дящих на выходах сигналы, пропорционал ные перепаду:давления HQ на органе 2 и потребляемой мощности WQ соответственно от текущего перемещения S(t) што ка 5 (положения регулирующего элемента органа 2) в нормальном режиме. При возможных изменениях давления Р (-t) перед органом 2 и, следовательно, возмож ных изменениях мощности и перепада дав ления в нормальном режиме на одни из входов блоков 7 и 8 подаются сигналы коррекции с соответствующих выходов блока 10 коррекции,которые сформированы им по сигналу текущего давления Pit) ) поступающего на вход блока 10 от датчика 1 давления. Опорные сигналы HQ и Wp с выходов блоков 7 и 8 моделирования перепада давления и мощности и сигнал S(tJ с выхода блока 9 поступают на первые вхо ды соответственно элементов 11, 12 и 13 сравнения. На вторые входы элементов сравнения 11-13 поступают соответ ственно текущие сигналы, пропорциональные перепаду давления H(.t) на органе 2, действительной потребляемой мощности W(.t) приводом и расчетной скорости S - органа 2, снимаемые соответственно с выходов датчика 3 перепада давления, датчика 14 мощности (выходной сигнап формируется по значениям тока и напряжения питающих щин привода 4 и снимаемых с трансформаторов 16 тока и напряжения) и задатчика 15 скорости органа. 2, После сравнения модельного перепада давления HO мощности /( и расчетной скорости S о и текущих VI t) ,) и Sit) в соответствующих элементах срав нения 11-13 на их выходах появляются сигналы, пропорциональные отклонениям модельных парметров от их действительных значений, т.е. йН Нр-HuWs-W -W и LS р-2,которые поступают на соответствующие входы пороговых блоков 17. Каналы пороговых блоков 17, фиксирующие сигналы отклонений поДН, и uS настраиваются на средний уровень сра нения соответствующих параметров независимо. Средний уровень сравнения соответствует контролируемым параметрам органа 2, находящегося в нормальном рабочем состоянии. Ширина каналов блоков 17, равная соответствующим значениям 6H,iw и б5 характеризует порог срабатывания каналов и устанавливается заранее на основании допустимых отклонений относительно минимальных и максимальных значений соответствующих параметров. Если сигнал отклонения некоторого параметра не превыщает щирину ndрога срабатывания соответствующего канала порогового блока, на его обоих выходах формируются сигналы логического уровня О, а для сигналов отклонений, превыщающих установленный порог срабатывания в меньшую или больщую сторону, - сигналы логического уровня I, Так как высокие уровни значений этих сиг налов на обоих выходах каждого блока не совпадают, это эквивалентно формированию логических комбинаций сигналов, которые соответствуют отношениям (, 1Х-)( иХ Хр-сЛх (где X для соответствующих каналов пороговых блоков заменяется на H,vy -и S ), несущих определенную информацию о рабочем состоянии органа 2 и типе его неисправности. При превышении сигналами рассогласований йН, (U 5 выше допустимых значений установленных порогов срабатывания своих каналов пороговых блоков, Т. е, |uH|(/-H,|AWl7C7 W HluSl t S эти каналы срабатывают, и на выходах блоков 17 формируются выходные сигналы в форме логических комбинаций, передавая таким образом в анализирующий блок 18 информацию для распознавания рабочего состояния органа 2 и выявления причины неисправности. После распознавания состояния органа 2 и обнаружения неисправности анализирующий блок 18 формирует выдачу селективной информации в блок 19 сигнализации о причине неисправности органа 2. В блоке 18 реализован алгоритм распознавания состояния органа. 2, отображающий диагностический граф возможных неисправностей, возникающих в органе 2, обнаружение которых выявляется (распознается) по логическим комбинациям, формируемым на выходах блоков 17 на основании текущих значений отклонений контролируемых параметров. Например, если сигнал отклонения д5, нимаемый с выхода элемента 13 сравнеПИЯ после сравнения текущей скорости S , поступаюшей с выхода бпока 9, с заданной BO - с выхода задатчика 15, не превышает установпенного значения сЛЗ - порога срабатывания канала ско рости бпока 17, т. e,|uSl-lS-Sol O S,4TO свидетельствует об исправности привода и кинематической передачи, и сигналы отклонений лН и (/ снимаемые соответственно с выходов элементов 11 и 12 сравнения после сравнения модельны сигналов, поступающих с выходов блоков 7 и 8 перепада давления и мощности, с действительными сигналами перепада давления и мощности, поступающими от датчиков перепада 3 и мощности 14, так же не превыщают установленных значений (Ли и - порогов срабатывания каналов перепада давления и мощности, т.е. IW1 HQ-HU .и lu MlslXMo- s UcANW, что свидетегаьствует об отсутствии износа регулирующих элементов, заиления и закупорки проходных рабочих полостей органа 2 и отсутствии перегруза двигателя, на -выходах блоков 17 формируется комбинапия логических сигналов, по- стоящая из одних нулей (нулевая комбина ция), по которой блок 18 после анализа фо мирует информацию о нормальном состоянии и исправности органа 2, передава- емую- в блок 19 .сигнализации для оператора. Алгоритм распознавания нормаль ного состояния органа 2 в рабочем режиме приведен втаблице (1-я строка). п При появлении неисправности, например когда износ регулирующих элементов (поворотная опслоика, клапан-седло, щечек задвижек Лудло и т. п.) ор гана 2 превысил допустимые пределы, а привод и кинематическая передача находятся в исправном состоянии и отсутст вует закупорка проходных полостей органа 2, то на выходах элементов 12 и 13 сравнения сигналы отклонений будут мень ще порогов срабатывания, т. e,jAV/| и1Д51 с , так как потребляемая приводом мощности соответствует модельной (или близка к ней) для исправного привода и скорость перемещения органа 2 также соответствует заданной (поломок в кинематической передаче и закупорок нет), а на выходе элемента 11 сравнения после сравнения модельного перепада давления на органе 2 при отсутствии износа и действительного перепада давления, соответствующего изношенному органу 2, формируется отрицательный сигнал отклонения йН , превышающий сЛН порог срабатывания канала перепада, т.е. ДН -(ЛН, свидетельствующий о недопустицом уменьшении перепада давления из-за увеличения проходного сечения органа 2, обусловленного его износом. Относительно отклонений ЛН -(Н,1лЭД1 iuSlitfS, на выходах блоков 17 формируется логическая комбинация, по которой в блоке 18 формируется сигнал, поступающий в блок 19 сигнализации, о недопустимом износе органа 2 и изменении его расходной характеристики (2-я строка табли- цы). Таким же образом работает устрюйст во при закупорке рабочей полости, заедании, заклинивании и выпадении регулирующих элементов и неисправностях в приводе. Например, при заедании регулирующего элемента органа 2 скорость перемещения щтока меньще заданной или равна нулю, перепад на органе 2 при данном давлении и положении щтока соответствует модельному, а потребляемая при- . водом мощность будет больше чем определенная для данного положения штока по модели, поэтому на выходах элементов 11-13 сравнения появляются сигналы отклонений параметров, которые будут соответствовать отношениям |й ИI cfH, и u5 относительно которых на выходах блоков 17 формируется логическая . Комбинация, а по ней в блоке 18 - сигнал в блок 19 сигнализации о заедании регулирующего элемента органа 2 (3-я строка таблицы). Другие возможные случаи неисправностей органа 2 и алгоритм диагностического контроля и обнаружения этих неисправностей, а также формируемые информационные сигналь в блок сигнализации для оператора приведены в таблице.
|АН14сЛИ UNVUd W
ДНЧ-С Н luV(
IfiSKc S
. 3
4 t(H
5
6 ДН7(ЛН
7 (Л «luSI O
8 lANMMcTWД5 cAS
9 .
Состояние регулирующего органа нормальное - исправен
Неисправен регули-г рующий орган: износ регулирующих элементов, износ полости проходного сечения
Неисправен регулирующий орган: за-, едание регулирующих элементов и щтока
Неисправен регупирующий орган: поломка в кинематической передаче исполнительного механизма
Регулирующий орган исправен (хотя состояние ненормальное): закупорка полостей проходного сечения
, Неисправен регулирующий орган: износ запорных элементов
Регулирующий орган исправен: заклинивание проходного сечения
Поломка, рассое-Регулирующий ординени или обрывган неисправен: порегулирующеголомка регулируюэлементащего элемента
Регулирующий орган неисправен: поломка исполнительного механизма
13
922002
14 Продолжение табтшы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля и защиты насосной станции | 1980 |
|
SU918545A1 |
| Устройство для контроля и регулирования установки трубопроводного транспорта | 1980 |
|
SU925816A1 |
| Устройство автоматического согласо-ВАНия и КОНТРОля РЕжиМОВ МНОгОСТупЕН-чАТыХ НАСОСНыХ и гидРОТРАНСпОРТНыХуСТАНОВОК | 1979 |
|
SU819011A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТУРБОАГРЕГАТА | 1994 |
|
RU2056506C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМИ ОРГАНАМИ ГИДРОТУРБИН (ВАРИАНТЫ) | 2018 |
|
RU2710944C1 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
| Устройство автоматического регулирования режимов насосной промежуточной станции многоступенчатой гидротранспортной установки | 1987 |
|
SU1572953A1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| Способ регулирования микроклимата в теплице и система для его осуществления | 1991 |
|
SU1819537A1 |
10
uH -оГН uNW
(ЛЗ
11
Таким образом, предлагаемое устройство реагирует на любые возможные изменения состояния регулирующих органов вызванные неисправностями их элементов и узлов, обеспечивая надежный контроль состояния и обнаружение неисправностей с выдачей селективной информации оператору о причине неисправности.
Автоматическое обнаружение неисправностей регулирующего органа обеспечивает своевременный ремонт или за-: мену органа, поскольку его надежная работа в основном определяет эффективность регулирования режимов гйдротранспортного трубопровода при управлении потоком среды. Кроме того, надежный контроль состояния и гидравлических характеристик органа снижает возможные больщие динамические отклонения и ошибки регулируемого давления и расходаПотока, повыщает устойчивость работы САР в результате чего дополнительно снижаются затрать на нерациональное расхо- дование полезного продукта и энергии на перекачивание нерационального излишка продукта. Эти факты особенно важны для регулирующего органа, имеющего довольно значительные объемы проходной рабочей полости и работающего при высоких давлениях и скоростях потока среды.
Формула изобретения
Регулирующий орган неисправен: износ регулирующих элементов и проходного сечения; изменение расходной характеристики регулирующего органа
Регулирующий орган неисправен: неисправен привод
гулирующего органа транспортного трубопровода, содержащее датчик давления, установленный на трубопроводе, датчик перемещения и задатчик скорости перемещения регулирующего органа, и блок сигнализации, отличающееся тем, что, с целью повышения надежности ра боты, оно снабжено элементами сравнения, датчиками перепада давления и потребляемой приводом мощности, порого1выми и анализирующим блоками, блоком коррекции, блоками моделирования зависимости перепада давления и мощности от перемещения регулирующего органа и блоком определения отклонения скорости перемещения регулирующего органа от заданной, вход которого и одни из входов блоков моделирования подключены к датчику перемещения, а их выходы - к од-, ним из входов соответственно первого. Второго и третьего элементов сравнения, другие входы которых подключены соответственно к датчику перепада давления, датчику мощности и задатчику скорости, а выходы - к входам пороговых блоков соединенных выходами с входами анапилизирующего блока, к выходу которого подключены блок сигнализации, причем другие входы блоков моделирования подключены к выходу блока коррекции, соединенного входом с датчиком давления.
Источники информации, принятые во внимание при экспертизе
W
