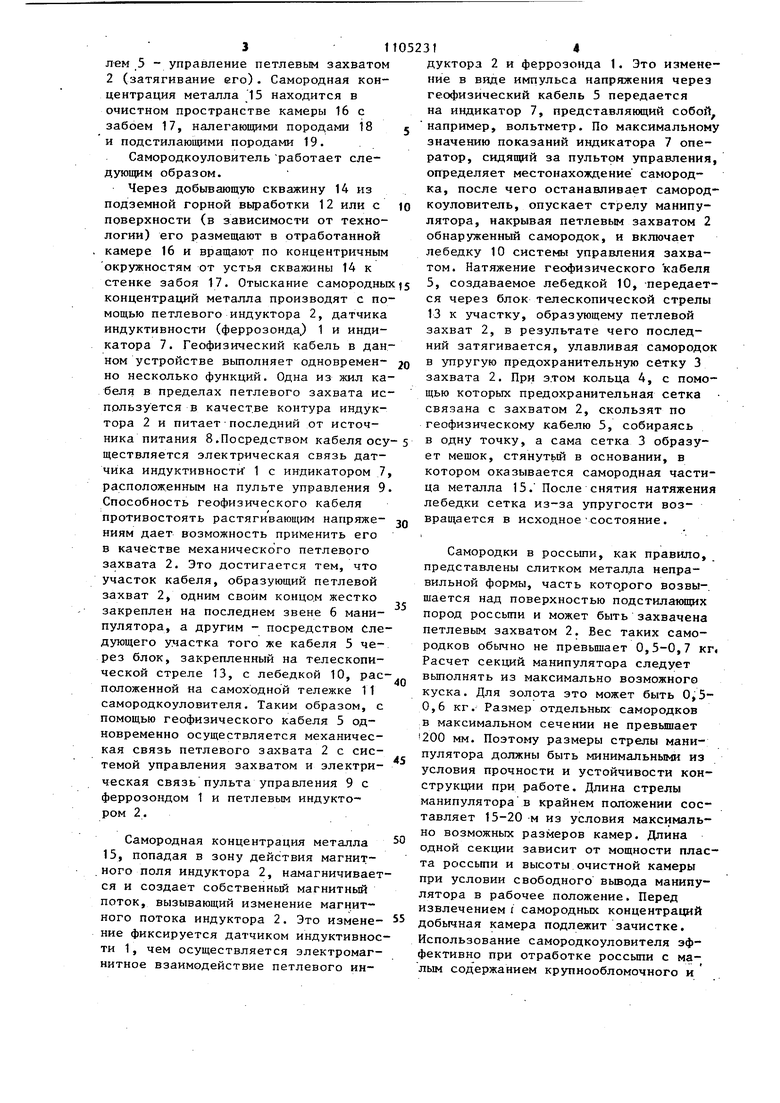
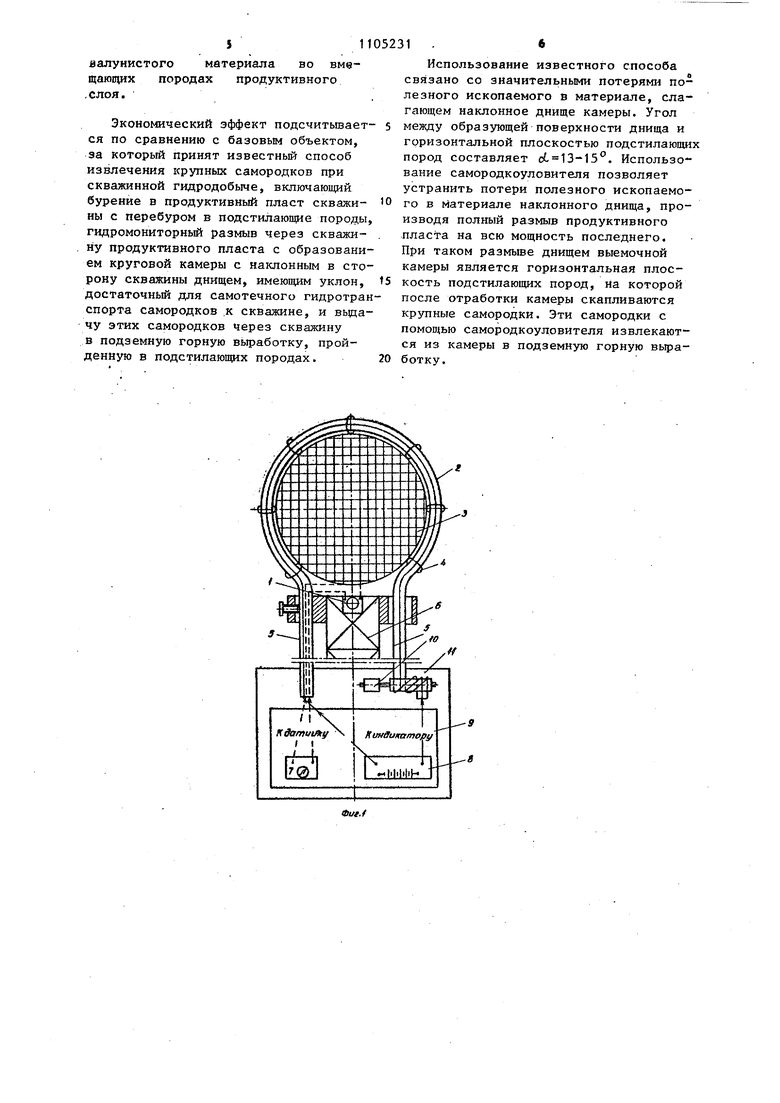
Изобретение относится к горнодвбывающему оборудованию и предназначено для извлечения самородных концентраций металла из камер прискважинной гидродобыче тяжельпс минералов из россыпных месторождений в условиях отсут ствия визуального наблюденк, Известен самородкоуловитель для извлечения тяжелых минералов, также используемый в горнодобывающей отрасли, включающий ручное управление, захватное устройство которого связано с механизмом вертикального перемещения установленным на стреле. Этот само1родкоуловитёль можно использовать при шедении работ в открытом очистном про странстве, где доступ к объекту свобо ден и возможно визуальное наблюдение Cl 3- . Извлечение тяжелых самородных концентрацйй металла в условиях безлюдной скважинной добычи таким самородкоуловителем невозможно. Известен самородкоуловитель, содер жащий тросовуюсистему управления пр1Ь водом звеньев и полиспастный механизм расположенные на телескопической .стреле с гидравлическим приводом, а также специальные захватные приспособления 2 . Недостатком известного самородкоуловителя является низкая эффективность работы, связанная с невозможностью извлечения самородных частиц тяжелого металла из очистного пространства при скважинной гидродобыче в отсутствие прямой видимости. Цель изобретения - повьпаение эффективности работы самородкоуловителя за счет обеспечения извлечения самородных частиц тяжелого металла из очистного пространства при скважинной гидродобыче в условиях отсутствия прямой видимости. Поставленная цель достигается тем, что самородкоуловитель, содержащий тросовую систему управления приводом звеньев и полиспастный механизм, расйоложенные на телескопической стреле с гидравдическим приводом, снабжен датчиком индуктивности, расположен ным у Т9рца последнего звена стрелы, выпвлненным из кольцевой петли геофизического кабеля индуктором, пультом управления, включающим в себя индикатор и источник питания, которые электрически соединены первый - с датчиком индуктивности, а второй - с индук тором, и прикрепленной к.кольцевой петле посредством колец предохранительной упругой сеткой, образующей совместно с этой петлей захват, причем кабель индуктора механически связан с лебедкой и его кольцевая петля размещена у торца последнего звена стрелы. Снабжение известного самородкоуловителя петлевым захватом-индуктором и датчиком индуктивности (феррозондом) , расположенным в зоне электромаг нитного поля индуктора, позволяет обеспечить эффективное извлечение крупных самородков тяжелого металла из выемочных камер при отсутствии визуального наблюдения, что достигается первоначальным обнаружением самородка путем фиксации феррозондом изменения электромагнитного поля петлевого захвата-индуктора, вызванного попаданием под контур индуктора частицы металла, а затем затягиванием петлевого захвата на частице и выемкой ее из камеры. На фиг.1 показана головная часть самородкоуловителя на фиг.2 - принципиальная электрическая схема устройства; на фиг.З - самородкоуловитель, расположенный в добычной камере, общий вид. Самородкоуловитель состоит из датчика индуктивности (феррозонда) 1 и индуктора 2, выполняющего также роль петлевого захвата,свободно свя-занного с упругой предохранительной сеткой 3 посредством колец 4, надетых на геофизический кабель 5 захвата.Феррозонд 1 и индуктор 2 расположены на последнем звене 6 телескопической стрелы манипулятора, имеющей гидравлический привод, и через геофизический кабель 5 электрически связаны соответственно с индикатором 7 и источником питания 8, установленными на пульте управления 9. Петлевой захват 2 посредством того же геофизического кабеля 5 механически связан с лебедкой 10, которая вместе с пультом управления 9 расположена на самоходной тележке 11. С пульта управления 9 из подземной горной выработки 12 гидравлическим приводом осуществляется управление телескопической стрелой 13, располагаемой в скважине 14, тро.совой системой управления приводом звеньев и полиспастным механизмом манипуляция звеньями 6 устройства, а лебедкой 10 и геофизическим кабелем 5 - управление петлевым захватом 2 (затягивание его). Самородная концентрация металла 15 находится в очистном пространстве камеры 16 с забоем 17, налегающими породами 18 и подстилающими породами 19. Самородкоуловитель работает следующим образом. Через добывающую скважину 14 из подземной горной выработки 12 или с поверхности (в зависимости от технологии) его размещают в отработанной камере 16 и вращают по концентричным окружностям от устья скважины 14 к стенке забоя 17. Отыскание самородны концентраций металла производят с по мощью петлевого индуктора 2, датчика индуктивности (феррозонда 1 и индикатора 7. Геофизический кабель в дан ном устройстве выполняет одновременно несколько функций. Одна из жил ка беля в пределах петлевого захвата ис пользуется в качестве контура индуктора 2 и питаетпоследний от источника питания 8.Посредством кабеля осу ществляется электрическая связь датчика индуктивности 1 с индикатором 7 расположенным на пульте управления 9 Способность геофизического кабеля противостоять растягивающим напряжениям дает возможность применить его в качестве механического петлевого захвата 2. Это достигается тем, что участок кабеля, образующий петлевой захват 2, одним своим концо.м жестко закреплен на последнем звене 6 манипулятора, а другим - посредством Сле дующего участка того же кабеля 5 через блок, закрепленный на телескопической стреле 13, с лебедкой 10, рас положенной на самоходной тележке 11 самородкоуловителя. Таким образом, с помощью геофизического кабеля 5 одновременно осуществляется механическая связь петлевого захвата 2 с системой управления захватом и электрическая связь пульта управления 9 с феррозондом 1 и петлевым индуктором 2. Самородная концентрация металла 15, попадая в зону действия магнитного поля индуктора 2, намагничивает ся и создает собственный магнитный поток, вызывающий изменение магнитного потока индуктора 2. Это изменение фиксируется датчиком индуктивнос ти 1 , чем осуществляется электромагнитное взаимодействие петлевого индуктора 2 и феррозонда 1. Это изменение в виде импульса напряжения через геофизический кабель 5 передается на индикатор 7, представляющий собой например, вольтметр. По максимальному значению показаний индикатора 7 оператор, сидящий за пультом управления, определяет местонахождение самородка, после чего останавливает самородкоуловитель, опускает стрелу манипулятора, накрывая петлевым захватом 2 обнаруженный самородок, и включает лебедку 10 системы управления захватом. Натяжение геофизического кабеля 5, создаваемое лебедкой 10, передается через блок телескопической стрелы 13 к участку, образующему петлевой захват 2, в результате чего последний затягивается, улавливая самородок в упругую предохранительную сетку 3 захвата 2. При этом кольца 4, с помощью которых предохранительная сетка связана с захватом 2, скользят по геофизическому кабелю 5, собираясь в одну точку, а сама сетка 3 образует мешок, стянутьй в основании, в котором оказывается самородная частица металла 15. После снятия натяжения лебедки сетка из-за упругости возвращается в исходноеСостояние. Самородки в россьти, как правило, представлены слитком металла неправильной формы, часть которого возвы-. шается над поверхностью подстилающих пород россьти и может быть захвачена петлевым захватом 2. Вес таких самородков обычно не превышает 0,5-0,7 кг, Расчет секций манипулятора следует выполнять из максимально возможного куска. Для золота это может быть 0,50,6 кг. Размер отдельных самородков в максимальном сечении не превышает 200 мм. Поэтому размеры стрелы манипулятора должны быть минимальными из условия прочности и устойчивости конструкции при работе. Длина стрелы манипуляторав крайнем положении составляет 15-20 м из условия максимально возможных размеров камер. Длина одной секции зависит от мощности пласта россыпи и высоты очистной камеры при условии свободного вывода манипулятора в рабочее положение. Перед извлечением г самородных концентраций добычная камера подлежит зачистке. Использование самородкоуловителя эффективно при отработке россыпи с мальш содержанием крупнообломочного и йалунистого материала во вмещающих породах продуктивного .слоя. Экономический эффект подсчитьшается по сравнению с базовым объектом, за который принят известньй способ извлечения крупных самородков при скважинной гидродобыче, включающий бурение в продуктивный пласт скважины с перебуром в подстилающие породы, гидромониторньй размыв через скважину продуктивного пласта с образованием круговой камеры с наклонным в сторону скважины днищем, имеющим уклон, достаточный для самотечного гидротран спорта самородков .к скважине, и вьдачу этих самородков через скважину в подземную горную вьфаботку, пройденную в подстилающих породах, 11
20 ботку. 1 .« Использование известного способа связано со значительными потерями полезного ископаемого в материале, слагающем наклонное днище камеры. Угол между образующей поверхности днища и горизонтальной плоскостью подстилающих пород составляет сС 13-15 . Использование самородкоуловителя позволяет устранить потери полезного ископаемого в Материале наклонного днища, производя полный размыв продуктивного пласта на всю мощность последнего. При таком размыве днищем выемочной камеры является горизонтальная плоскость подстилающих пород, На которой после отработки камеры скапливаются крупные самородки. Эти самородки с помощью самородкоуловителя извлекаются из камеры в подземную горную выра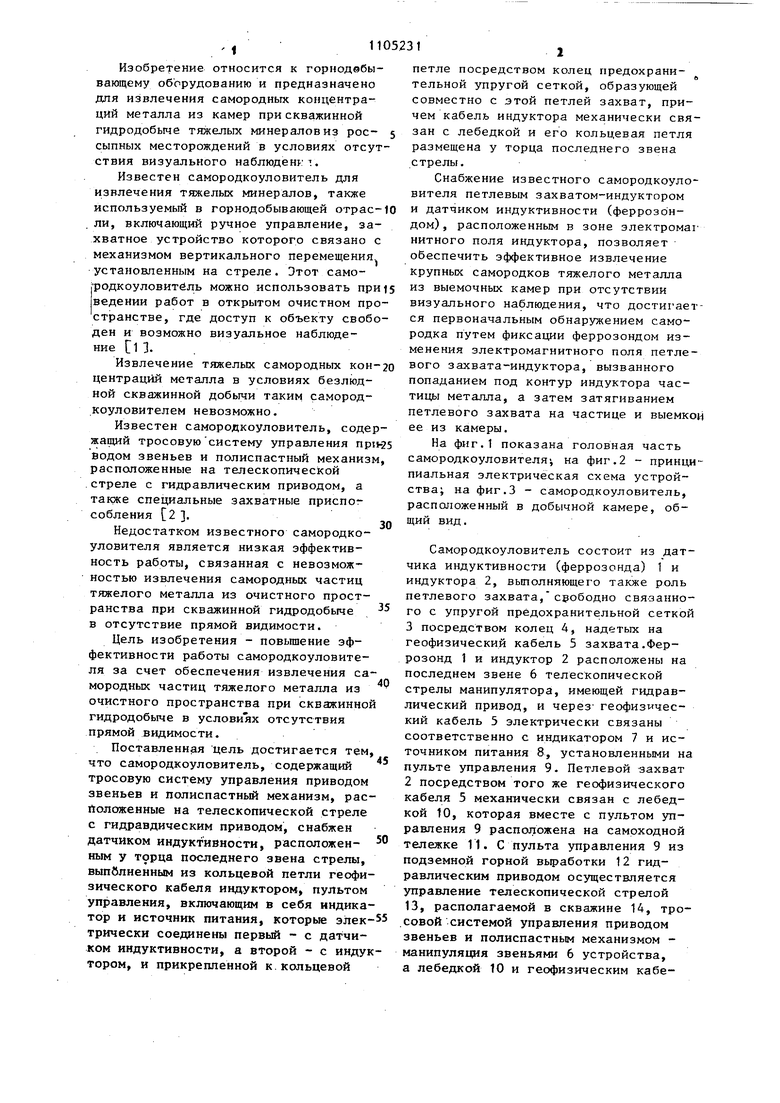
| название | год | авторы | номер документа |
|---|---|---|---|
| Когнитивный мобильный комплекс для геологоразведки | 2016 |
|
RU2626740C1 |
| Скважинный гидромонитор | 1981 |
|
SU1059185A1 |
| Способ извлечения полезных ископаемых из продуктивных горизонтов | 1986 |
|
SU1395830A1 |
| ИЗМЕРИТЕЛЬНЫЙ ЗОНД ДЛЯ ПОГРУЖЕНИЯ В РАСПЛАВ МЕТАЛЛА | 2005 |
|
RU2308695C2 |
| Устройство для установки затяжек | 1981 |
|
SU994749A1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ, В ЧАСТНОСТИ ТОРФА | 2005 |
|
RU2304721C1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| Эрлифтно-гидромониторный снаряд | 2024 |
|
RU2831690C1 |
| КАРОТАЖНАЯ СТАНЦИЯ | 2006 |
|
RU2331091C1 |
| Самолаз | 1979 |
|
SU825880A1 |
САМОРОДКОУЛОВИТЕЛЬ, содержащий тросовую систему управления приводом звеньев и полиспастный механизм, расположенные на телескопической стреле с гидравлическим приводом, отличающийся тем, что, с целью повышения эффективности работы за счет обеспечения извлечения самородных частиц тяжелого металла из очистного пространства при скважинной гидродобыче, он снабжен датчиком индуктивности, расположенным у торца последнего звена стрелы, выполненным из кольцевой петли геофизического кабеля индуктором, пультом управления, включающим в себя индикатор и источник питания, которые электрически соединены первый - с датчиком индуктивности, а второй - с индуктором и Лрикрепленной к кольцевой петле посредством колец предохранительной упругой сеткой, образующей совместно с этой петлей захват, причем кабель индуктора механически связан с лебедкой и его кольцевая петля размещена у торца последнего звена стрелы.
/
/
« Illlhf
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU375174A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1972 |
|
SU418318A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
