Предлагаемое техническое решение относится к устройствам средств геологоразведки и предназначено преимущественно к использованию на равнинных месторождениях рассыпных минералов в осадочной породе для скоростного установления мест их скоплений и координат крупных фрагментов (самородков) путем локации во время движения самого локатора по земле, а также для быстрого прицельного извлечения самородков.
Известно изобретение «Мобильный георадар для дистанционного поиска местоположения подземных магистральных коммуникаций и определения их поперечного размера и глубины залегания в грунте» [патент RU 2256941, опубл. 20.07.2005]. «Сущность: антенны георадара выполнены в виде коллимирующих решеток, шарнирно закрепленных снаружи, например, на днище фюзеляжа летательного аппарата с возможностью синхронного качания каждой антенны в плоскости поперечного сечения фюзеляжа на угол 1...5°. Антенны сфокусированы в сторону поверхности земли. Длительность зондирующих электромагнитных импульсов фиксирована в пределах диапазона 10...0,2 нс. Технический результат: расширение функциональных возможностей, высокая помехозащищенность и качество изображения». Недостаток устройства – невозможность решать с его помощью поставленную перед нами задачу геологоразведки.
Известно изобретение «Подвижная подводная автономная сейсмогидроакустическая станция разведки углеводородов на акватории Арктического шельфа» [патент RU 2515170, опубл. 10.05.2014]. «Имеет прочный корпус обтекаемой формы, энергосиловую установку, движитель, гироскоп, измеритель пути, эхолот, датчик глубины, локатор сигналов гидроакустического маяка, средства регулирования плавучести и бортовой компьютер с программным устройством управления перемещением станции из одной точки моря в другую, зависанием, спуском на дно, подъемом со дна на заданное заглубление и на поверхность моря. Технический результат: создание подвижной подводной автономной сейсмогидроакустической станции разведки углеводородов, способной самостоятельно перемещаться по заданной программе в исследуемые точки моря, зависать над ними, опускаться на дно и подниматься со дна на заданную глубину при одновременном снижении собственных сейсмогидроакустических помех». Недостаток устройства – невозможность решать с его помощью поставленную перед нами задачу геологоразведки.
Наиболее близким по технической сущности к заявляемому можно считать устройство «Установка для сейсморазведки транзитных зон вода-суша» [патент RU 56655, опубл. 10.09.2006]. «Сущность: синергия процессов бурения и сейсморазведки посредством использования минимального состава оборудования и его рационального размещения. Установка для сейсморазведки транзитных зон вода-суша содержит транспортное средство в виде самоходной или несамоходной платформы, оснащенной технологическим оборудованием, включающим геофизический модуль и буровой модуль, причем геофизический модуль включает лабораторное помещение контейнерного типа, компрессор высокого давления с ресивером, дизель-электростанцию и спуско-подъемное устройство в виде лебедки, а буровой модуль включает, по крайней мере, один буровой станок.
Отличительной особенностью установки является то, что геофизический модуль снабжен, по крайней мере, одним малогабаритным пневматическим источником (ПИ) сейсмических сигналов, содержащим корпус с верхней гайкой, в которой размещены разъем соединения ПИ с ресивером шлангом высокого давления, а также контакты питающего кабеля ПИ и контакты сигнального кабеля ПИ, подключенных к блоку управления, входящего в состав лабораторного помещения, буровой станок выполнен в виде станка для шнекового вращательного бурения, снабженного жестко закрепленной к платформе полой штангой и сопряженной с ней вращающейся бурильной трубой, на рабочем конце которой размещены буровая коронка и шнек. Кроме того, отличием установки является то, что кроме режима шнекового вращательного бурения имеет режим ударного бурения (вдавливания), для чего дополнительно снабжена установленным на платформе механизмом вдавливания в грунт бурильных труб с размещенными на них ПИ сейсмических сигналов, который выполнен, например, в виде пневматического или гидравлического домкрата и обеспечивает глубину вдавливания от 0,5 до 2,5 м.
Технический результат: повышение информативности путем комплексирования бурения и сейсморазведки; размещение ПИ на различных уровнях пробуренной скважины без перемещения установки и без замены оборудования; использование группового ПИ». Недостаток устройства – невозможность решать с его помощью поставленную перед нами задачу геологоразведки.
Задача предлагаемого изобретения - создание мобильного устройства для проведения ускоренной автоматизированной локационной геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе.
Задача решается с помощью предлагаемого когнитивного мобильного комплекса для геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе, содержащего самоходное транспортное средство с размещенными на нем дизель-электростанцией, геофизическим и буровым модулями, кроме того, геофизический модуль оснащен источниками сигналов локации и блоком управления, причем комплекс разделен на две энергонезависимые части: тягач и раму. Рама выполнена с возможностью фиксации на тягаче и снабжена: стойками, дизель-электростанцией, батареей аккумуляторов, не менее чем двумя буровыми модулями, манипулятором, модулем промывочным, запасным электрогенератором с гидротурбиной, роторы которых соединены между собой составным гибким валом, причем корпус гидротурбины соединен со стрелой лебедки, а также к корпусу гидротурбины может крепиться гибкая плотина, дополнительным электрогенератором с ветродвигателем, установленными на концах раздвижного вертикального вала, бытовкой. В свою очередь, тягач снабжен дизель-электростанцией, батареей аккумуляторов, системой автоматической установки радиоактивных меток и боксом с геофизическим модулем, содержащим компьютерный блок управления геофизическими приборами, тремя вращающимися локаторами, а также встроенными локаторами буровых модулей.
Технический результат заключается в том, что посредством предлагаемого автоматизированного когнитивного мобильного комплекса возможно проведение ускоренной эффективной локационной геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе для определения границ их залегания, концентрации в единице объёма и координат крупных фрагментов (самородков), а также для быстрого прицельного их извлечения при глубине залегания до 10 м, уменьшение трудозатрат, сроков разведки и экологического ущерба, увеличение слоя локационного обследования до 10 м в ширину и глубину со скоростью продвижения комплекса по грунту при сканировании локаторами до 15 км/ч.
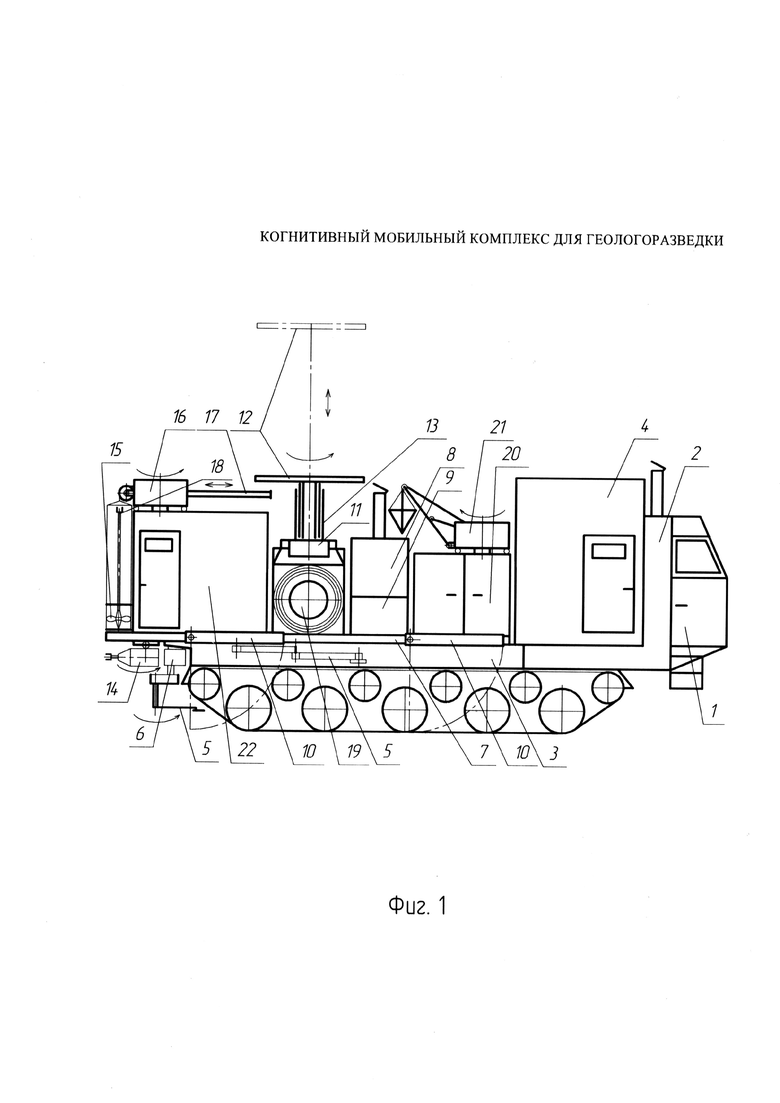
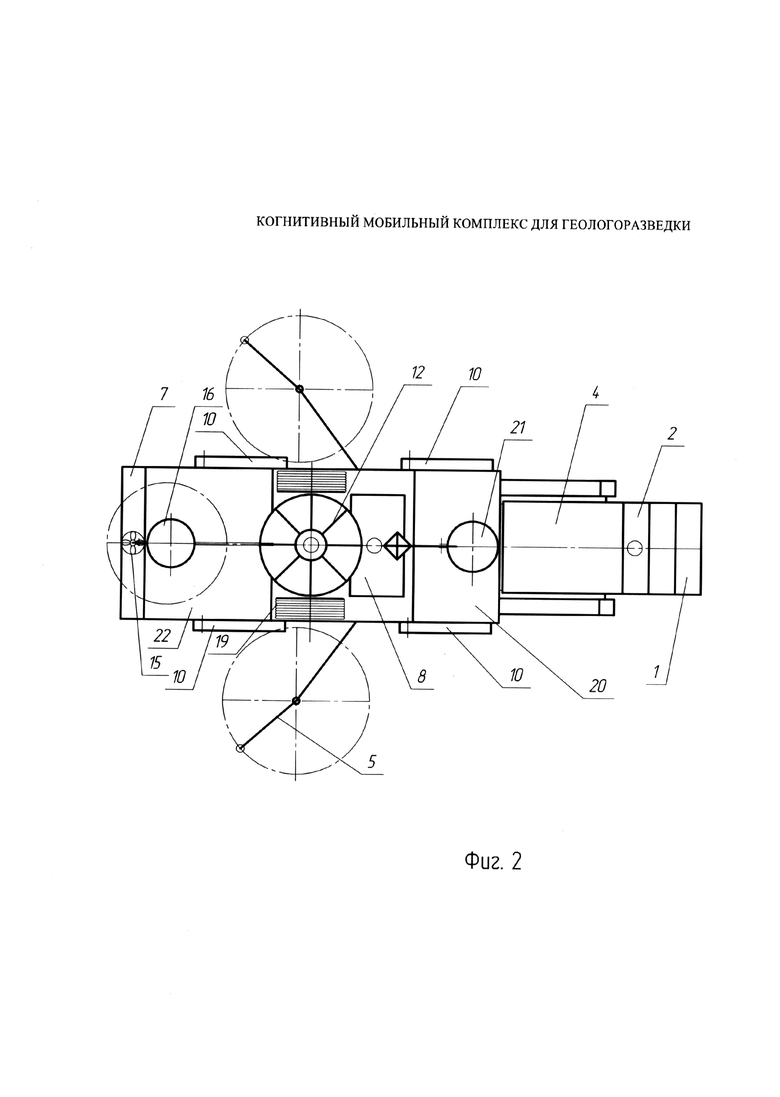
На фигуре 1 показан пример исполнения комплекса с тягачом на гусеничном ходу, вид сбоку, и на фигуре 2 – то же, вид сверху – во время движения в режиме первичной локации верхних слоёв земли. На фигуре 3 показана съемная часть комплекса - технологическая рама - в рабочем положении, стоящая на поворотных стойках, вид сбоку.
На тягаче 1 (фиг.1 и 2) размещены: дизель-электростанция 2, батарея аккумуляторов 3, бокс 4 с геофизическим модулем - компьютерным блоком управления геофизическими приборами и тремя вращающимися локаторами 5, система 6 автоматической установки радиоактивных меток над скоплениями ценных минералов. Рама 7 установлена с фиксацией, например, штифтами (на фигурах условно не показаны), на тягаче 1. В свою очередь, на раме 7 размещены: дизель-электростанция рамы 8, батарея аккумуляторов рамы 9, четыре поворотных стойки 10, дополнительный электрогенератор 11 с ветродвигателем 12, установленные на концах раздвижного, например, телескопического, вертикального вала 13, обеспечивающего подъём ветродвигателя 12 с вертикальной осью вращения в рабочее положение; запасной электрогенератор 14 с гидротурбиной 15, устанавливаемой с помощью лебедки 16 и стрелы 17 в ручей или реку и соединяемой с электрогенератором 14 составным гибким валом 18 (на фигурах условно показан только первый участок составного гибкого вала 18, присоединенный к гидротурбине 15), к гидротурбине 15 может крепиться также гибкая плотина наподобие парашюта (на фигурах условно не показана); минимум два буровых модуля 19, способных осуществлять вибробурение вдавливанием с возможностью синхронного погружения наконечников с встроенными в них локаторами (на фигурах условно не показаны) для проходки двух скважин одновременно и локации грунта между ними, модуль промывочный 20, манипулятор 21, бытовка 22 для экипажа.
Устройство работает следующим образом. Тягач 1 движется по намеченной трассе под управлением водителя. По обеим сторонам тягача и по центру вращаются три локатора 5, охватывая в сумме полосу шириной около 10 м и примерно такой же глубины. Компьютерный блок управления отображает текущую картину локации на экране и записывает в долговременную память те файлы, на которых система 6 автоматически отмечает реальными (например, радиоактивными) метками на поверхности земли и условными виртуальными метками на электронном изображении обнаруженные металлы или другие полезные ископаемые. В случае обнаружения самородков существенного размера и количества комплекс автоматически сигналит и тормозится, экипаж может принять решение извлечь находку. Тогда поворачиваются в вертикальное положение закрепленные на раме 7 и удлиняющиеся для упора в грунт четыре поворотные стойки 10, фиксируемые так, что вес рамы 7 переходит на них, появляется зазор между рамой 7 и тягачем 1, извлекаются фиксирующие раму 7 штифты, и это позволяет тягачу 1 выехать из-под неё, прижав локаторы 5 к бортам, и продолжать движение и локацию на местности. На установленной жестко на стойках 10 раме 7 запускается дизель-электростанция рамы 8. Бурильщик с промывщиком выполняют извлечение минералов с помощью манипулятора 21 и промывают их в модуле промывочном 20. При необходимости уточнения координат залегания самородков возможно разведочное бурение двумя буровыми модулями 19 и одновременная локация толщи грунта между ними встроенными в них локаторами.
Для подзарядки батарей аккумуляторов 3 и 9 возможно, не снимая раму 7 с тягача 1, использовать гидротурбину 15 с запасным электрогенератором 14, если стоянку выбрать у реки или ручья, а также воспользоваться ветреной погодой и ветродвигателем 12, подняв его на оптимальную высоту с помощью раздвижного телескопического вала 13, приводящего в действие дополнительный электрогенератор 11.
Результаты геологоразведки на данном месте закрепляются когнитивным – самообучающимся – программным обеспечением компьютерного блока управления, позволяющим определять элементный состав без отбора керна, строить трехмерное изображение жил полезных ископаемых и оптимальный порядок их извлечения. Таким образом, благодаря совокупности известных и новых признаков устройства достигаются цели предлагаемого изобретения: ускорение работ, уменьшение трудозатрат и экологического ущерба.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И РАЗВЕДКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ПОДЗЕМНЫХ ВОД | 2007 |
|
RU2366984C2 |
| Блочная автоматизированная электростанция контейнерного типа | 2017 |
|
RU2662800C1 |
| СКВАЖИННАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ | 2007 |
|
RU2373431C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕГЕРМЕТИЧНОСТИ И МЕСТА СРЕЗА ЭКСПЛУАТАЦИОННОЙ КОЛОННЫ | 2008 |
|
RU2375565C1 |
| СПОСОБ ЛОКАЛЬНОГО ПРОГНОЗА ЗОН РАПОПРОЯВЛЕНИЙ | 2017 |
|
RU2661082C1 |
| СПОСОБ ПОИСКА ЛОКАЛЬНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ В ВЫСОКОУГЛЕРОДИСТЫХ ОТЛОЖЕНИЯХ БАЖЕНОВСКОЙ СВИТЫ | 2017 |
|
RU2650852C1 |
| СПОСОБ ОПЕРЕЖАЮЩЕГО БУРЕНИЯ ПИЛОТНЫХ СТВОЛОВ ПРИ СТРОИТЕЛЬСТВЕ СКВАЖИН НА ШЕЛЬФЕ | 2023 |
|
RU2818392C1 |
| УСТРОЙСТВО И СПОСОБ КАШЕВАРОВА ДЛЯ ПРОДЛЕНИЯ СРОКА ЭКСПЛУАТАЦИИ НЕФТЯНЫХ МЕСТОРОЖДЕНИЙ | 1993 |
|
RU2098614C1 |
| Способ оценки возраста и состава пород осадочных бассейнов в арктическом регионе | 2024 |
|
RU2835972C1 |
| ПОЛУПОДЗЕМНАЯ ТЕПЛОВАЯ ЭЛЕКТРОСТАНЦИЯ КАШЕВАРОВА "ЭК" | 1992 |
|
RU2095580C1 |

Заявленное изобретение относится к устройствам средств геологоразведки и предназначено для использования на равнинных месторождениях рассыпных минералов в осадочной породе. Представленный когнитивный мобильный комплекс для геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе содержит самоходное транспортное средство с размещенными на нем дизель-электростанцией, геофизическим и буровым модулями, при этом геофизический модуль оснащен источниками сигналов локации и блоком управления, причем комплекс разделен на две энергонезависимые части: тягач и раму. Рама выполнена с возможностью фиксации на тягаче. Тягач снабжен дизель-электростанцией, батареей аккумуляторов, системой автоматической установки радиоактивных меток и боксом с геофизическим модулем, содержащим компьютерный блок управления геофизическими приборами, тремя вращающимися локаторами, а также встроенными локаторами буровых модулей. Технический результат заключается в создании мобильного устройства для проведения ускоренной автоматизированной локационной геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе. 3 ил.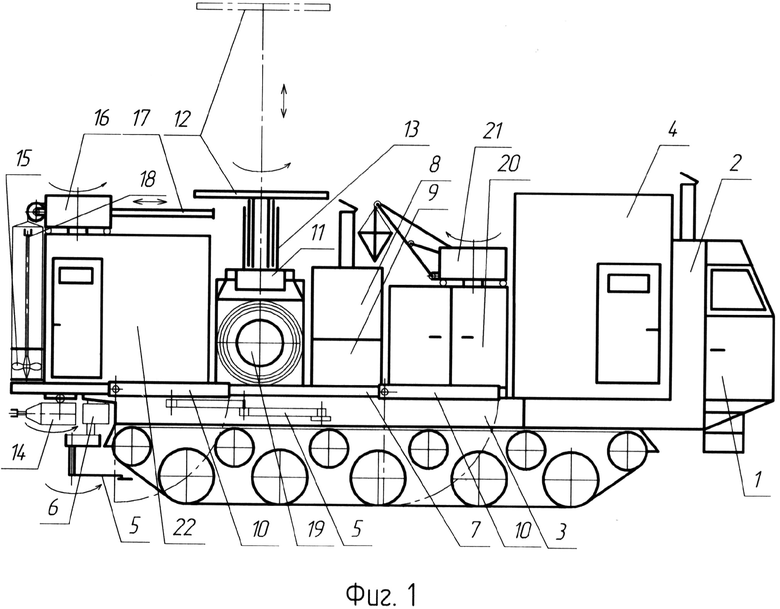
Когнитивный мобильный комплекс для геологоразведки на равнинных месторождениях рассыпных минералов в осадочной породе, содержащий самоходное транспортное средство, с размещенными на нем дизель-электростанцией, геофизическим и буровым модулями, причем геофизический модуль оснащен источниками сигналов локации и блоком управления, отличающийся тем, что комплекс разделен на две энергонезависимые части: тягач и раму, причем рама выполнена с возможностью фиксации на тягаче и снабжена:
- стойками;
- дизель-электростанцией и батареей аккумуляторов;
- не менее чем двумя буровыми модулями;
- манипулятором;
- модулем промывочным;
- запасным электрогенератором с гидротурбиной, роторы которых соединены между собой составным гибким валом, причем корпус гидротурбины соединен со стрелой лебедки, а также к корпусу гидротурбины может крепиться гибкая плотина;
- дополнительным электрогенератором с ветродвигателем, установленными на концах раздвижного вертикального вала;
- бытовкой;
в свою очередь, тягач снабжен дизель-электростанцией, батареей аккумуляторов, системой автоматической установки радиоактивных меток и боксом с геофизическим модулем, содержащим компьютерный блок управления геофизическими приборами, тремя вращающимися локаторами, а также встроенными локаторами буровых модулей.
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Способ котонизации лубяных волокон | 1938 |
|
SU56655A1 |
| EP 2975435 A2, 20.01.2016 | |||
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ПОДВИЖНАЯ ПОДВОДНАЯ АВТОНОМНАЯ СЕЙСМОГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ РАЗВЕДКИ УГЛЕВОДОРОДОВ НА АКВАТОРИИ АРКТИЧЕСКОГО ШЕЛЬФА | 2012 |
|
RU2515170C2 |

