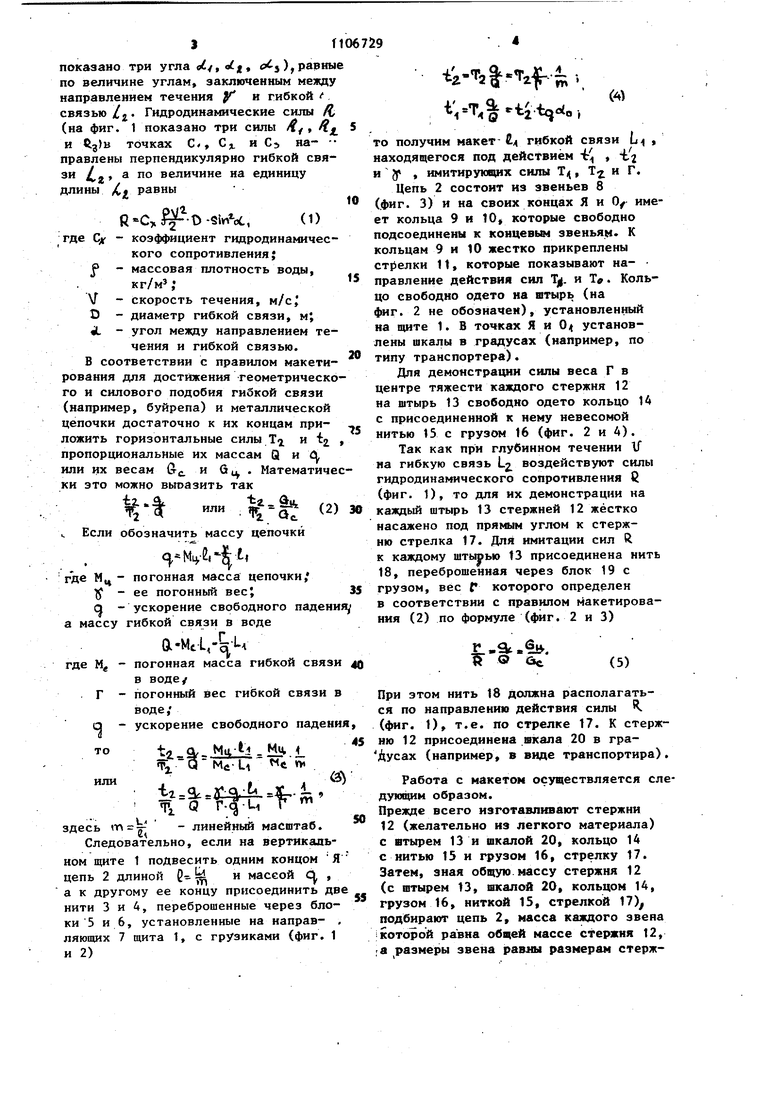
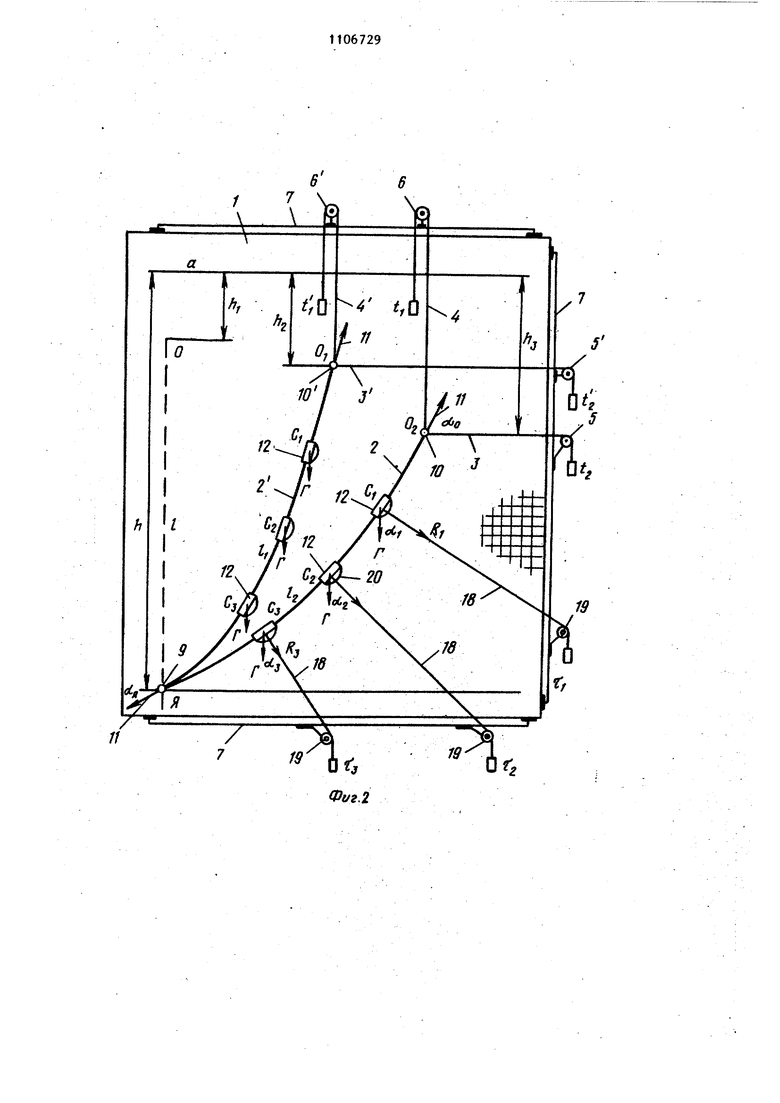
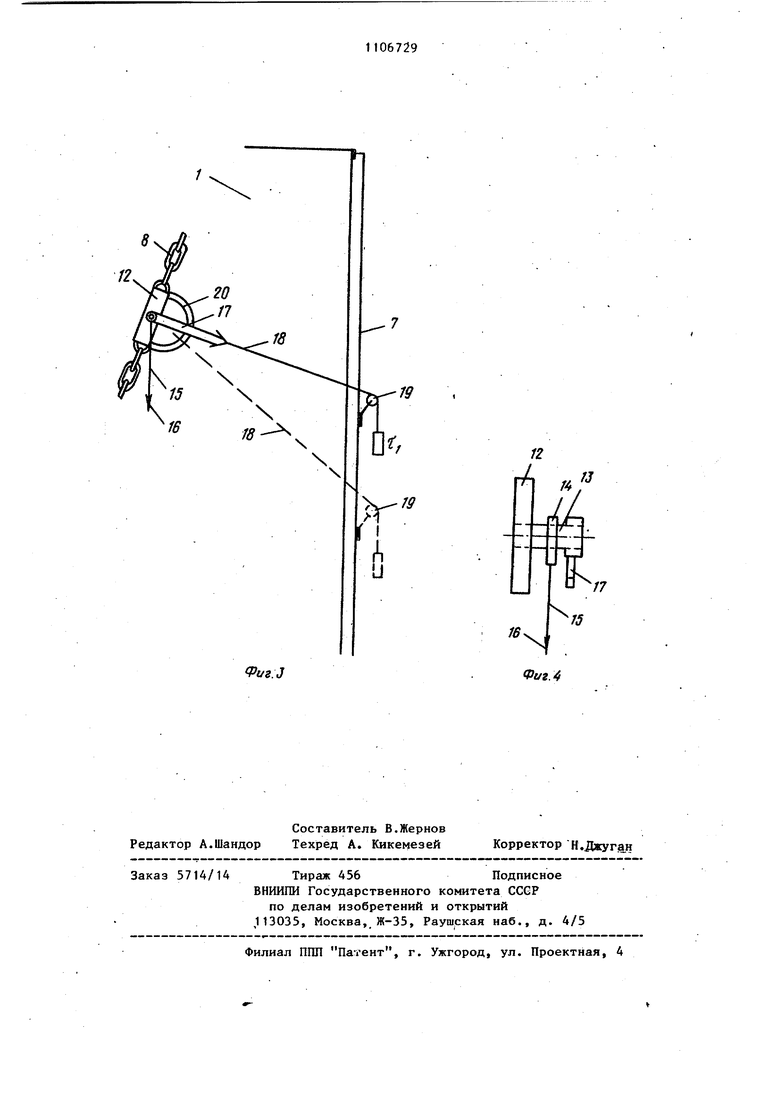
Изобретение относится К судостроению, в частности к макетам заякоренных систем, например, к буям, связанным через якорь с грунтом гибкой связью. Известен макет клюзового устройства, содержа1ций жесткий каркас с расположенными на нем тягами, гибкой перегородкой и блоком, через который переброшен якорный канат с грузом на одном конце и якорем на другом. Известный макет заякоренной системы включает в себя цепь, имитирующую гибкую связь и подвешенную одним концом на вертикальном uy-iTe в фиксирован ной точке, соответствующей положению якоря, а другим концом присоединенную к двум нитям,запасованным в установленные на направляющих вертикального щита блоки с грузами, имитирующими величины горизонтальной и вертикальной силы натяжения заякоренного объекта flj . Однако отсутствие в нем приспособлений, демонстрирующих направление действия сил, приложенных к заякоренной системе, находящейся под воздействием глубинного течения, и имитирующих гидродинамические силы, воздействующие на гибкую связь,не позволят р использовать известный макет для наглядной демонстрации влияния гидродинамических сил на положение элементов (гибкой связи, заякоренного объек та) заякоренной системы, а также снижает эффект наглядности. Кроме того, отсутствие в известном макете указанных приспособлений не позволят оперативно получить параметры заякоренной системы (конечные углы, углы по длине гибкой связи, углубление и т. п.) . Целью изобретения является обеспечейие возможности демонстрации влияни гидродинамических сил на положение элементов заякоренной системы и повышение эффекта наглядности. Поставленная цель достигается тем, что в известном макете заякоренной системы, включающем цепь, имитирующую гибкую связь и подвешенную одним концом на вертикальном щите в фиксированной точке, соответствующей положению якоря, а другим концом присоединенную к двум нитям, запасованным в установленные на направляющих верти кального щита блоки с грузами, имитирующими величины горизонтальной и вертикальной силы натяжения заякоренного объекта, цепь снабжена указателями направления действия сил натяжения, приложенных к концам гибкой связи, стержнями, каждый из которых содержит стрелку и отвес, показывающие соответственно направление действия гидродинамической силы и силы веса, приложенных по длине к гибкой связи и дополнительными грузами, имитирующими гидродинамические силы и подвещенными на концах дополнительных нитей, запасованных в дополнительные блоки, при этом указатели установлены на концах цепи, стержни вставлены в цепь и присоединены к ее смежным звеньям, нить отвеса, дополнительные нити и стрелка присоединены к каждому стержню в его центре тяжести, а масса каждого стержня со стрелкой и отвесом равна массе звена или соответствующего участка цепи. На фиг. 1 изображена заякоренная система под воздействием приложенных к ней сил; на фиг. 2 - макет заякоренной системы, общий вид; на фиг, 3 стерзрень со стрелкой и отвесом, присоединенный к звеньям цепи; на фиг. 4 - стержень со стрелкой и отвесом, вид сбоку. I При постановке заякоренной системы (в отсутствии течения) на глубине Н панер под действием плавучести Т заякоренного объекта О (например буя), гибкая связь /L (например, буйреп) принимает вертикальное положение (фиг. 1). При этом заякоренный объект О располагается на углублении Н от поверхности моря АА, а акорь на дне моря в точке Я. Под действием поверхностного течения заякоренный объект О занимает положение 0 , а гибкая связь L под действием сил веса Г занимает положение /,(фиг. 1). Под воздействием глубинного течения 2/ заякоренный объект 0/J занимает положение U, а гибкая связь /vY лод действием гидродинамических сил / и сил веса Г занимает положение /. (фиг. 1). Силы Г и/J определяют форму гибкой связи /о , а с учетом силы То - расстояние Hj заякоренного объекта 0 от поверхности моря АА. При этом силы Г по йсей длине гибкой связи /(,, равны по величине и их действие направлено вертикально вниз, образуя с силами гидродинамического сопротивления Ц, углы а(. (на фиг. показано три угла , , (),рарны по величине углам, заключенным между направлением течения У и гибкой f связью /J. Гидродинамические силы (на фиг. 1 показано три силы , и точках С, GX и С на- правлены перпендикулярно гибкой связи /.2 а по величине на единицу длины f равны R C -0-Si«4, (1) где Cff - коэффициент гидродинамического сопротивления j - массовая плотность воды, -скорость течения, м/с -диаметр гибкой связи, м; -угол мезкду направлением течения и гибкой связью. В соответствии с правилом макетирования для достижения геометрическо го и силового подобия гибкой связи (например, буйрепа) и металлической цепочки достаточно к их концам приложить горизонтальные силы Т и t пропорциональные их массам Q и Л или их весам &.. и бц . Математиче ки это можно выразить так fe-t (2) «2 г Qe. Если обозначить массу цепочки , где Мц - погонная масса цепочки, - ее погонный BecJ о - ускорение свободного падени а массу гибкой связи в воде a-MtLr -1-л где М - погонная масса гибкой связи в воде/ погонный вес гибкой связи в воде; ускорение свободного падени ta а tj Мч. 1 % Q Me-Ц «ft . : J -ffb-f- здесь - линейный масштаб. Следовательно, если на вертикальном щите 1 подвесить одним концом Я цепь 2 длиной - и массой С , а к другому ее концу присоединить дв нити 3 и 4, переброшенные через блоки 5 и 6, установленные на направ- , ляющих 7 щита 1, с грузиками (фиг. 1 и 2) ii-T,J.T,f.i,.. T,|-tiv«, то получим макет- Иц гибкой связи L t находящегося под действием 4 , 2 и 5 , имитирующих силы Т/{, Tj. и Г. Цепь 2 состоит из звеньев 8 (фиг. 3) и на своих концах Я и 0 имеет кольца 9 и 10, которые свободно подсоединены к концевьм звеньям. К кольцам 9 и 10 жестко прикреплены стрелки 1t, которые показывают на- правление действия сил Tjf. и Т#. Кольцо свободно одето на штырь (на фиг. 2 не обозиачен), установленный на щите 1. В точках Я и 0 установлены шкалы в градусах (например, по типу транспортера). демонстрации силы веса Г в центре тяжести каждого стержня 12 штырь 13 свободно одето кольцо 14 с присоединенной к нему невесомой нитью 15 с грузом 16 (фиг. 2 и 4). Так как при глубинном течении If на гибкую связь Ly воздействуют силы гидродинамического сопротивления Q (фиг. 1), то для их демонстрации на каждый штырь 13 стержней 12 жёстко насажено под прямым углом к стержню стрелка 17. Для имитации сил R к каждому штырью 13 присоединена нить 18, переброшенная через блок 19 с грузом, вес Г которого определен в соответствии с правилом макетирования (2) по формуле (фиг. 2 и 3) Г ,а:.%. 1Г О йе При этом нить 18 Должна располагаться по направлению действия силы (фиг. 1), т.е. по стрелке 17. К стержню 12 присоединена .шкапа 20 в граДусах (например, в виде транспортира). Работа с макетом осуществляется следующим образом. Прежде всего изготавливают стержни 12 (желательно из легкого материала) с штырем 13 и шкалой 20, кольцо 14 с нитью 15 и грузом 16, стрелку 17. Затем, зная общую.массу стержня 12 (с штырем 13, шкалой 20, кольцом 14, грузом 16, ниткой 15, стрелкой 17) подбирают цепь 2, масса каждого звена которой равна общей массе стержня 12, а размеры звена рааны размерам стержня (можно подобрать цепочку и из звеньев меньшего размера, но в этом случае необходимо выполнить условие равенства общей массы стержня и нескольких звеньев и их общей длины и длины стержня). Исходя из удобства демонстрации выбирают цепь 2 длиной (Z, с массой о, и линейным масштабом m , Между звеньями цепь 2 на равных расстоя йиях друг от друга присоединяют стерж ни 12 со штырем 13 и шкалой 20, а к концам Я и О цепочки 2 - кольца 9 и 10 с закрепленными на них стрелками 11.Цепь 2 подвешивают на вертикальном щите 1 одним концом при помощи кольца 9 на штырь (на фиг. 2 не обозначен размещенный в точке Я, а другим концом 0 при помощи нитей 3 и 4, перебр 5 и 6 с грузами шенных через блоки i и b с грузами 2 и t./i величину которых определяют из (4), выбрав величины Т , 1 и О для какой либо известной заякоренной системы. Блоки 5 и 6 предварительно установлены с возможностью перемещения по направляющим 7 щита 1. Затем на штыри 13 стержней 12 одевают кольц 14 с нитями 15 и грузами 16, а также насаживают стрелки 17, ориентируя их в сторону выпуклости цепи 2 и располагая перпендикулярно к стержню 12 Для соединения основных частей макета в нем использованы быстросъемные элементы (например, разрезные в звенья, кольца, карабины и т.п., которые на фиг. 2 не обозначены). При демонстрации на щит 1 накалывают миллиметровку. Путем перемещения по направляющим 7 блоков 5 и 6 добиваются горизонталь ного положения нити 3. и вертикального - нити 4. К этом случае цепь 2 демонстрирует положение заякоренной системы под воздействием поверхностного течения на заякоренный объект О, и сил погонного веса Г на форму гибкой связи L-1 . При этом нитка 15 с грузом 16 и стрелки 11 соответствен но демонстрируют направление действия сил веса и сил % н Т в точках Я и 0 заякоренной, системы, форма цепи 2 - форму гибкой связи . а стержни 12 - участки гибкой связи по ее длине. Для демонстрации положения элемен тов заякоренной системы на глубинном течении U к штырям 13 стержней 12 присоединяют нити 18, переброшенные через блоки 19 с грузика№1 r , , (Гд, величина которых определена по (1) и (5). При этом величину угла определяют как среднее где величины углов гч. , сС и тс снимают при положении цепи i по ыкалам 20 стержней 12 между нитями 15 и стрелками 17 (фиг. 1 и 2). Путем перемещения по направляющим 7 блоков 19 совмещают нити 18 со стрелками 17 (при этом сохраняют нить 3 горизонтальной, а нить 4 вертикальной, также перемещением блоков 5 и 6 по направляю1цин 7), так как усилия грузиков -г , г , должны быть направлены по направлению действия ° приложенных к участкам гибкой связи Lj. (фиг. 1 и 2) . Положение заякорного объекта 0 и форма гибкой связи L2 могут быть уточнены путем изменения величины грузов , 2. и 1 , величины которых пересчитывают по формуле (1) и (5) для уточненных углов ot-;) , и cCj,снятых по шкалам 20 для положения гибкой связи Lg , В этом случае цепь 2 со стержня демонстрирует гибкую связь L2 , а ее форма подобна форме гибкой связи, грузы ir и 2, имитируют величину вертикальной силы Т; (плавучести заякорного объекта) и величину горизонтальной силы Т (силы гидродинамического сопротивления корпуса заякоренного объекта), являющихся составляюш нми силы натяжения , стрелки 11 демонстрируют приложенные к заякоренному объекту и якорю силы Т и и их направление (величина которого легко снимается по шкалам, установленным Б точках Я и 02)/ стрелки 17 демонстрируют направление (по шкалам 20) сил гидродинамического сопротивления (J, R;2. и ъ приложенных к различным участкам гибкой связи LI J грузы Iz 3 имитируют силы гидродинамического сопротивления 1,2. приложенные к участкам гибкой связи L2 , отвес (нить 15 с грузом 16) демонстрирует направление действия сил веса г; величины отрезков h. и горизонтальной проекции OOj, характеризуют углубление Н Н1. отстояние (расстояние по горизонтали от якоря) заякоренного объекта, При помощи предлагаемого макета можно демонстрировать влияние различ ной скорости течения на положение
эаякоренной системы (путем изменения величины грузов d, ifj. Р ° стоянных величинах грузов t и влияния величины плавучести заякоренного объекта и т.п.
Эффективность предлагаемого макета
по сравнению с известным состоит в том, что он позволяет наглядно демонстрировать силы, приложенные к заякоренному объекту, якорю гибкой свясзи; демонстрировать форму гибкой связи; демонстрировать положение заякоренного объекта (его углубление и отстояние) демонстрировать влияние
на заякоренную систему изменения величины скорости течения, плавучести заякоренного объекта, диаметра гибкой связи и т.п.
Это в свою очередь повышает усвоение материала курсантами.
Снабжение макета быстросъемными элементами позволяет обеспечить его сборку и разборку в любой аудитории, оснащенной классной доской, что сокращает время на подготовку макета к действию и упрощает обращение с ним. Для изготовления макета не требуется каких-либо особых материалов и специалистов со специальной подготовкой.


| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный прибор | 1984 |
|
SU1240635A1 |
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Макет заякоренной системы | 1986 |
|
SU1357305A1 |
| Устройство для моделирования геометрических и силовых параметров гибких связей буксируемых в воде систем | 1983 |
|
SU1138825A1 |
| Вычислительный прибор | 1983 |
|
SU1105900A1 |
| Устройство для моделирования процесса буксировки в воздухе несущей поверхности | 1991 |
|
SU1810233A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГЕОМЕТРИЧЕСКИХ И СИЛОВЫХ ПАРАМЕТРОВ ГИБКИХ СВЯЗЕЙ ПОДВОДНЫХ СИСТЕМ | 1991 |
|
RU2076823C1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1988 |
|
SU1614022A2 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ КАРТИН, ПЛАНШЕТОВ, ПЛАКАТОВ, РЕКЛАМНЫХ ПРОСПЕКТОВ И ЧЕРТЕЖЕЙ | 1999 |
|
RU2153832C1 |
| Устройство для моделирования геометрических и силовых параметров располагаемых в воде систем | 1986 |
|
SU1347091A1 |
МАКЕТ ЗАЯКОРЕННОЙ СИСТЕМЫ, включающей цепь, имитирующую гибкую СВЯ311 и подвешенную одним концом на вертикальном щите в фиксированной точке, соответствующей положению якоря, а другим концом присоединенную к двум нитям, запасованным в установпенные на направляющих вертикального щита блоки с грузами, имитирующими величины горизонтальной и вертикальной сил натяжения заякоренного объекта, отличающийся тем, что, с целью обеспечения возможности демонстрации влияния гидродинамических сил на положение элементов заякоренной системы и повышения эффекта наглядности, цепь снабжена указателями направления действия сил натяжения, приложенных к концам гибкой связи, стержнями, каждый из которых содержит стрелку и отвес, показывающие соответственно направление действия гидродинамической силы и силы веса, приложенных по длине гибкой связи, и дополнительными грузами, имитирующими гидродинамические силы и подвешенными на концах дополнительных нит тей, запасованных в дополнительные блоки, при этом указатели установлены на концах цепи, стержни вставлены с в цепь и присоединены к ее смежным звеньям, нить отвеса, дополнительные нити и стрелка присоединены к каждому стержню в его центре тяжести, а масса каждого стержня со стрелкой S COOT- с 1. и отвесом равна массе звена или ве.тствующего участка цепи.
c.
Т Фиг.1
8
12
W
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пиянзов Г.Г | |||
| Механическое моделирование работы якорной цепи | |||
| Судостроение, 1972, № 12, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
