112
Изобретение относится к приборам для вычерчивания плоских кривых, преимущественно катенарных и цепных линий, форму которых принимают гибкие связи буксируемых и заякоренных сие- тем, линий электропередач, висячих мостов и других аналогичных устройств
Целью изобретения является расширение диапазона решаемых задач путем вычерчивания цепных и катенарных линий.
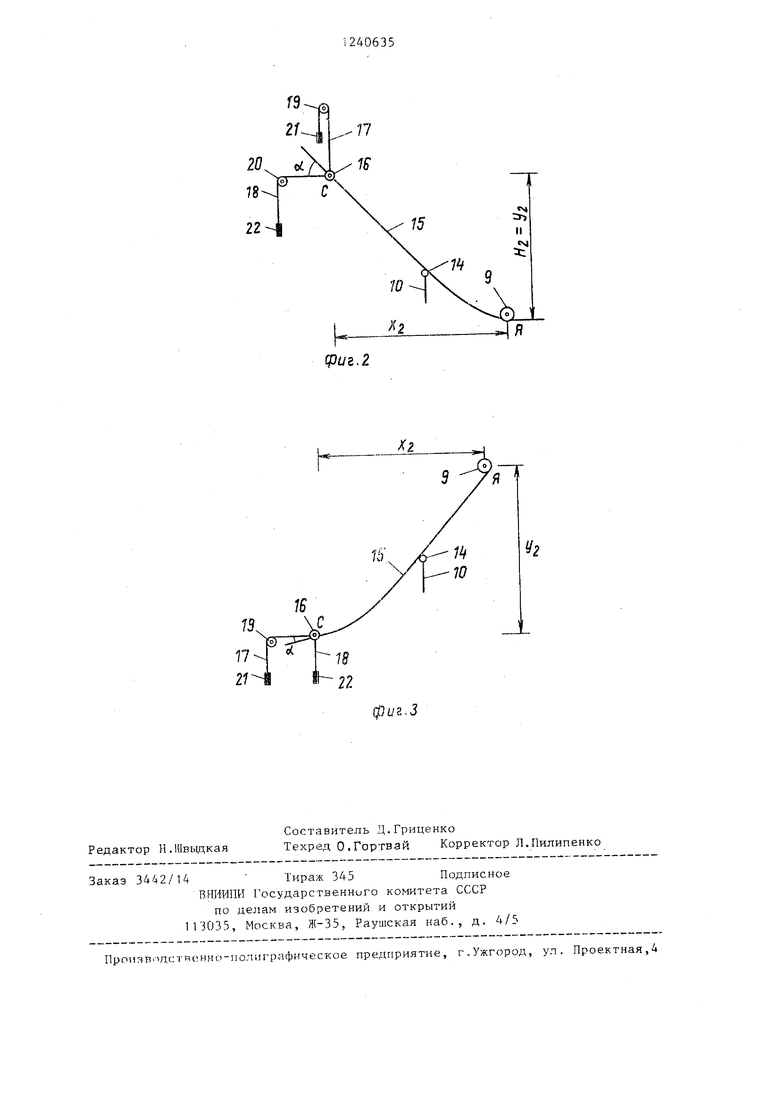
На фиг,1 схематически показан прибор, общий вид; на фиг, 2 и 3 примеры применения прибора,
.Прибор содержит основание, выполненное, например, в виде вертикального щита 1, на котором установлены направляющие 2, 3, 4 и балка 5, На направляюЕЦИх и балке установлены ползуны 6, 7 и 8,
На ползуне 6 закреплен барабан 9, на ползуне 7 - телескопический стер
жень lOj а на ползуне 8 закреплен шарнирно с возможностью фиксации Г- образный стержень 11, Направляющая 3 связана с направляющей 2 и балкой 5 посредством дополнительных ползунов 12 и 13, на конце телескопического стержня 10 закреплен пишущий штифт 14, На барабане 9 закреплен один конец гибкой нити 15, выполненной в виде металлической цепочки, на другом ее конце закреплено кольцо 16 со стрелкой. На кольце 16 закреплены две дополнительные нити 17 и 18, обвитые вокруг роликов 19 и 20, закрепленных на концах стержня 11, со сменными грузами 21 и 22, Направляющие 2, 3 и 4, балка 5 и телескопический стержень 10 имеет линейные шкалы а Г-образный стержень - угловую шкалу.. . Уравнение цепной линии имеет вид
у а
(ch| -1)
(1).
а
1
Г
г
-параметр цепной линии;
-горизонтальная составляющая натяжения;
-погонный вес.
Уравнение (1) справедливо для люг бой металлической цепочки. Формы металлических цепочек с различными погонными весами (массами) подобны, если их параметры Ct- равны
7 т
1(- -ii(2)
q q
а линейные размеры пропорциональны
О
j
У
Li
L/
. m
(3)
2 J Z где m - линейный масштаб.
Таким образом, форму любой металлической цепи можно найти, если соответствующим образом подвесить на щите 1 цепочку любого погонного веса.
Пример 1. Необходимо вычертить форму якорной цепи, на которой стоит судно. Глубина, места Н, длина якорной цепи L.( , а вес погонного
места в воде qy (фиг.2). I
Исходя из выбранного линейного масштаба т, берут металлическую цепочку длиной -- любого погонно20
го веса q. Подвешивают эту цепочку 15 за кольцо 16 на оси Г-образного стержня. Другой конец цепочки, намотанный на барабан., располагают при ПОМ01ЦИ ползуна 6 на расстоянии по
Н
вертикали Н, -- m
в точке Я, Затем
на нитях 17 и 18, привязанных к кольцу 1 6 и переброшенных через ролики 19 и 20, подвешивают грузы 21 и 22, вес которых 7 и Т подбирают так чтобы кольцо 16 не касалось оси стержня 11, нить 17 располагалась вертикально, а нить 18 - горизонтально, В этом случае согласно соотношениям (1), (2) и (3) цепочка 15 длиной L имеет форму, подобную натурной якорной цепи длиной L, Передвигая ползун 7 с телескопическим стержнем 10 при помощи штифта 14, вычерчивают цепную линию L. Одновременно прибор позволяет определить силу давления Т ветра на судно и снос его под действием этой силы.
Так, согласно соотношению (2)
Г, Т, а
f 2 q а согласно выражению
(3)
X j X,7
m
2 где Tj - вес груза 22, подвешенного
на нитке 18;
х„ - замеренное по линейной шкале балки 5 расстояние по горизонтали между точками Я и С, По стрелке кольца 16 и угловой шкале определяют угол наклона силы натяжения якорной цепи в точке С присоединения судна. Величина этой силы может быть найдена по формуле
Т -Ъ,- .
COS оС
Во время буксировки троса с отводящим аппаратом на своем ходовом конце трос принимает форму катенар- ной кривой, уравнение которой имеет вид, аналогичный цепной линии (1)
b (ch g -1) .
где b -- параметр катенарнои кривой;
F - натяжение вдоль троса; г - погонное гидродинамическое сопротивление троса, обтекаемого потоком жидкости под углом 90 . Очевидно, что металлическая цепочка подобна тросу в потоке, если вьтолняются условия
-ti
где у ,, x ,Ly - координаты и длины
катенарнои кривой;
у , х, координаты и длина
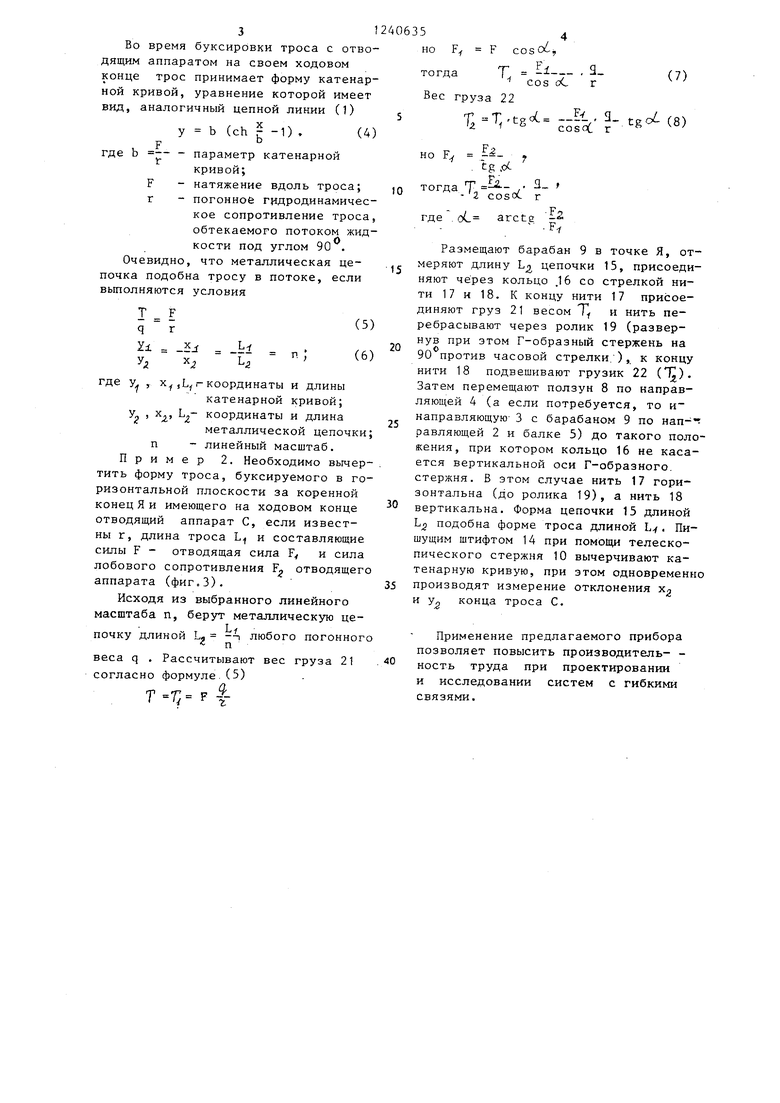
металлической цепочки п - линейный масштаб. Пример 2. Необходимо вьгчер- тить форму троса, буксируемого в горизонтальной плоскости за коренной конец Я и имеющего на ходовом конце отводящий аппарат С, если известны г, длина троса L и составляющие силы F - отводящая сила Fy и сила лобового сопротивления F отводящего аппарата (фиг.З),
Исходя из выбранного линейного масштаба п, берут металлическую цепочку длиной L, -п любого погонног с ti
21
веса q . Рассчитывают вес груза согласно формуле.(5)
, Г 7; F|240635
10
НО
F.
тогда
F cos
Т.
l±
a
r
COS oC Bee груза 22
Fi; cj
HO Py
F . , tg f
cosa(.
tg
(7)
o (8)
тогда - 2 cosoc r
где
0
arctg -- . F
.
15
20
25
30
35
40
Размещают барабан 9 в точке Я, отмеряют длину L цепочки 15, присоединяют через кольцо .16 со стрелкой нити 17 и 18. К концу нити 17 присоединяют груз 21 весом Т и нить перебрасывают через ролик 19 (развернув при этом Г-образный стержень на 90 против часовой стрелки;), к концу нити 18 подвешивают грузик 22 (IJ). Затем перемещают ползун 8 по направляющей 4 (а если потребуется, то и направляющую- 3 с барабаном 9 по нап- равляющей 2 и балке 5) до такого положения, при котором кольцо 16 не касается вертикальной оси Г-образного. стержня. В этом случае нить 17 горизонтальна (до ролика 19), а нить 18 вертикальна. Форма цепочки 15 длиной L подобна форме троса длиной L. Пишущим щтифтом 14 при ПОМО1ЦИ телескопического стержня 10 вычерчивают ка- тенарную кривую, при этом одновременно производят измерение отклонения х и у конца троса С.
Применение предлагаемого прибора позволяет повысить производитель- - ность труда при проектировании и исследовании систем с гибкими
связями.
(риг. 2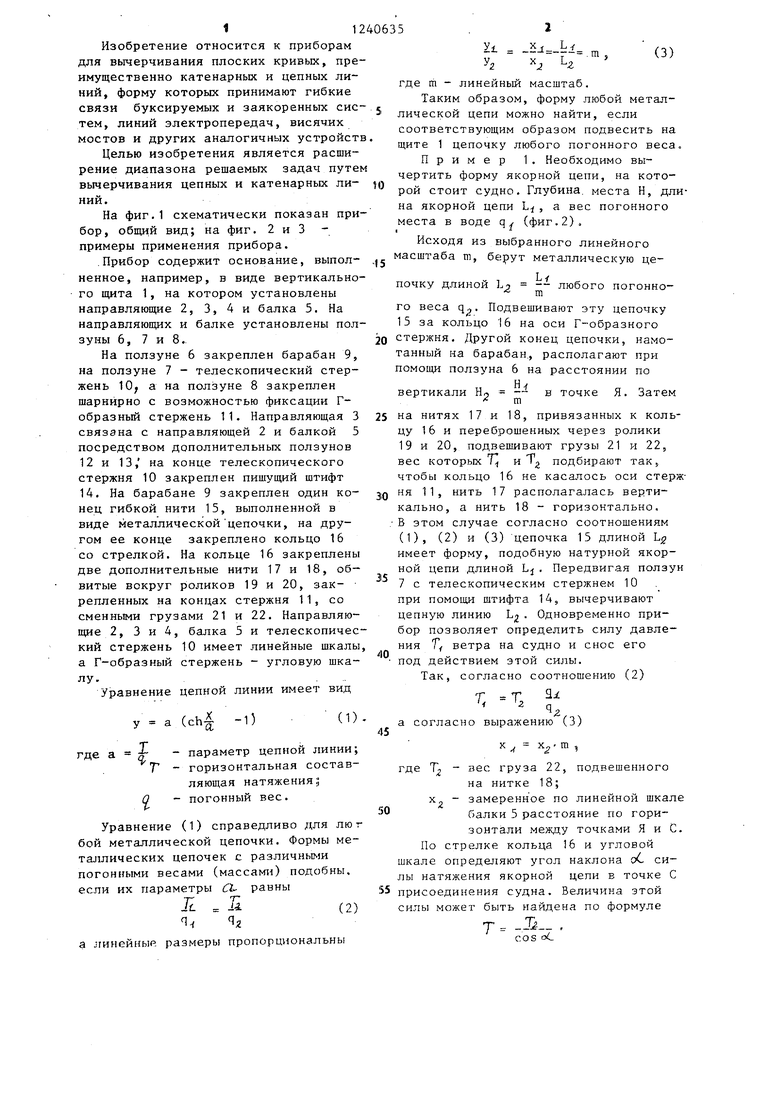
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительное устройство | 1985 |
|
SU1275475A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1986 |
|
SU1316014A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1988 |
|
SU1614022A2 |
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Макет заякоренной системы | 1983 |
|
SU1106729A1 |
| Устройство для моделирования процесса буксировки в воздухе несущей поверхности | 1991 |
|
SU1810233A1 |
| Учебный прибор по механике | 1989 |
|
SU1716557A1 |
| УЧЕБНЫЙ ПРИБОР ПО СОПРОТИВЛЕНИЮ МАТЕРИАЛОВ | 1999 |
|
RU2176821C2 |
| Устройство для моделирования геометрических и силовых параметров располагаемых в воде систем | 1986 |
|
SU1347091A1 |
| Установка для испытания моделей подводных объектов в опытовом бассейне | 1990 |
|
SU1735112A1 |
Редактор И,Швыдкая
Составитель Д.Гриценко
Техред О.Гортвай Корректор Л.Пилипенко
Заказ 3 i42/l4 Тираж 345Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Г1роизводств(:1И} о-полнграфическое предприятие, г.Ужгород, ул. Проектная,4
фиг.З
| Автоматизированный чертежный прибор координатного типа | 1978 |
|
SU765027A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Маркин Д.Р..Введение в механику гибкой нити | |||
| М | |||
| : Нпук., 1980 | |||
