Изобретение относится к экспериментальной аэромеханике, в частности к устройствам для моделирования в воздухе несущей поверхности.
Цель изобретения - снижение затрат на исследование за счет упрощения конструкции имитатора аэродинамического воздействия.
На фиг. 1 показан общий вид предлагаемого устройства; на фиг. 2 - крепление нитей к стержню.
Устройство для моделирования в воздухе буксируемой несущей поверхности содержит модель буксировочного троса в виде металлической цепочки 1, закрепленной коренным концом на вертикальном щите 2 в точке А, модель несущей поверхности, выполненную в виде стержня 3 с расчалками 4 и 5 и присоединенную к ходовому концу металлической цепочки 1, а также имитатор аэродинамического воздействия в виде двух грузов 6 и 7. Грузы 6 и 7 присоединены при . помощи двух гибких нитей 8 и 9 к стержню 3 в точке, соответствующей центру давления несущей поверхности. Для обеспечения возможности перемещения точки присоединения нитей 8 и 9 к стержню 3 на нем закреплен хомут 10 с винтом 11, нанесены деления, В предлагаемое устройство входит также транспортир 12, закрепленный своим центром в точке Б соединения металлической цепочки 1 и модели несущей поверхности. Транспортир выполнен из легкого материала (картона или тонкого листа органического стекла) и. может быть ориентирован относительно вертикали. В вертикальном щите 2 выполнен вертикальный паз а, в котором установлен ролик 13, и через него перекинута гибкая нить 9. Для удобства ориентации транспортира 12 и определения угла наклона стержня 3 на щите 2 могут быть нанесены вертикальные линии. Груз б является имитатором аэродинамического сопротивления .несущей поверхности, а груз 7 - подъемной аэродинамической или отводящей силы.
Предлагаемое устройство работает следующим образом.
После закрепления коренного конца металлической цепочки 1 в точке А и соединения ее ходового конца в точке Б с моделью несущей поверхности приступают к нахождению равновесного положения несущей поверхности, то есть к определению угла атаки , при котором модель несущей поверхности находится в равновесии при ее закреплении в точке Б, Производят это следующим образом. Принимают, например, что угол равновесия , тогда по кривым 14, 15, 16 и 17 определяют Сх1, Cyi, Ki,
Cdi. Ослабляют винт 11 и перемещают хомут 10 в то положение на стержне 3, которое соответствует центру давления (Cdi, чему способствуют деления, нанесенные на стержне). Затягивая винт 11, закрепляют хомут 10. К нити 8 подвешивают груз 6, вес которого 01 имитирует аэродинамическое сопротивление несущей поверхности и должен быть равен
,
где m - масштабный коэффициент; р - плотность воздуха; V - скорость движения несущей поверхности. Нить 9 перекидывают через ролик 13 и подвешивают к ней груз 7, вес которого & имитирует аэродинамическую подъемную силу несущей поверхности и должен быть равен
25
ft m Cyi-S
Однако геометрическое равновесия несущей поверхности, т.е. равновесный угол атаки ft, полностью определяется аэродинамическим качеством несущей поверхности
сfk или отношением весов грузов |Ј. Таким образом, приняв произвольным вес груза G равным ОН, нужно обеспечить вес груза
7 равным Q., а для выбранного угла . Именно таким выбирают вес груза 7. После этого добиваются горизонтальности нити 9, для чего перемещают ролик 13 по пазу а, и измеряют фактическое значение угла наклона стержня 3 . Если ., то необходимо увеличить величину ft, приняв, например и повторить описанную операцию до получения ftj-ftl- Таким образом геометрическое раеновесие несущей поверхности смоделировано, но веса грузов 6 и 7 могут быть пропорционально изменены.
Обратимся теперь к металлической цепочке 1, Под действием тяжести цепочка 1
занимает положение подобное положению буксировочного троса в точке, а усилия в ней определяются по формулам механического подобия
cosa
fТн - натяжение буксировочного троса; Тм - натяжение в металлической цепочке;
а- угол наклона металлической цепочки или буксировочного троса;
V2
/9yd.
где Ст - коэффициент аэродинамического сопротивления единицы длины обтекаемого перпендикулярно потоком буксировочного троса,
d - диаметр буксировочного троса;
Р - вес единицы длины металлической цепочки.
Таким образом отношение- определяет масштаб силового моделирования.
Для моделирования может быть выбрана металлическая цепочка с любым погонным весом, а величины грузов 6 и 7 определяются по формулам
CVS
vs.
.a-ftfp
В результате получается реальная картина равновесия системы буксировочный трос - несущая поверхность. При помощи транспортира 12 определяется угол наклона цепочки 1 и угол у, по которому, зная значение угла 0 (определяемого конструкцией несущей поверхности), можно вычислить угол атаки /Зф в - у,
Формула изобретения
Устройство для моделирования процесса буксировки в воздухе несущей поверхности, содержащее модель несущей поверхности, соединенную с ней ходовым концом модель буксировочного троса, закрепленную коренным концом к неподвижной опоре, и имитатор аэродинамического воздействия, отличающееся тем, что, с целью снижения затрат на исследования за счет упрощения конструкции имитатор аэродинамического воздействия, модели несущей поверхности и буксировочного
5 троса выполнены соответственно в виде стержня с расчалками и металлической цепочки, неподвижная опора в виде вертикально расположенного щита, снабженного транспортиром в виде круга с центром, рас0 положенным в точке соединения расчалок стержня с металлической цепочкой, а имитатор аэродинамического воздействия выполнен в виде двух грузов с гибкими нитями, присоединенными к стержню в точке, соот5 ветствующей центру его аэродинамического давления, при этом щит выполнен с вертикально расположенным пазом, в котором установлен ролик с вертикально расположенным пазом, в котором установлен
0 ролик с возможностью линейного перемещения вдоль паза, а одна из гибких нитей с грузом перекинута через этот ролик.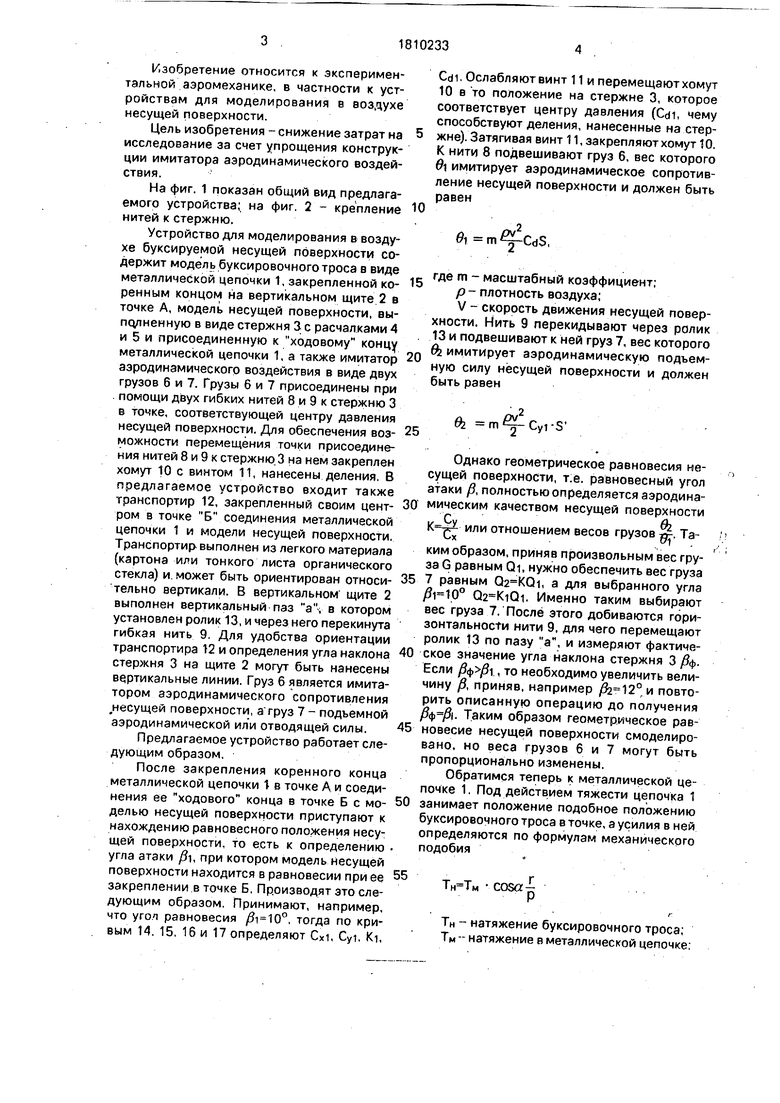
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Чертежный прибор | 1984 |
|
SU1240635A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГЕОМЕТРИЧЕСКИХ И СИЛОВЫХ ПАРАМЕТРОВ ГИБКИХ СВЯЗЕЙ ПОДВОДНЫХ СИСТЕМ | 1991 |
|
RU2076823C1 |
| СПОСОБ СЖАТИЯ МОДЕЛИРОВАННОГО ЛЕДОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2222460C2 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| ТРОСОВАЯ ПОДВЕСКА ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ АЭРОДИНАМИЧЕСКИХ МОДЕЛЕЙ | 1987 |
|
SU1494703A3 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ОРУДИЙ ПРОМЫШЛЕННОГО РЫБОЛОВСТВА МЕТОДОМ МЕХАНИЧЕСКИХ АНАЛОГИЙ | 1970 |
|
SU266303A1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1988 |
|
SU1559867A1 |
| Установка для испытания моделей подводных объектов в опытовом бассейне | 1990 |
|
SU1735112A1 |
| Макет заякоренной системы | 1983 |
|
SU1106729A1 |
Изобретение относится к экспериментальной аэромеханике и может быть использовано для моделирования несущей поверхности буксируемой в воздухе. Цель изобретения. Снижение затрат на исследование за счет упрощения конструкции имитатора аэродинамического воздействия. Устройство для моделирования процесса буксировки в воздухе несущей поверхности содержит модель буксировочного троса в виде металлической цепочки 1, закрепленной коренным концом на вертикальном щите 2, модель несущей поверхности, выполненную в виде стержня 3 с расчалками 4 и 5 и присоединенную к ходовому концу металлической цепочки 1, а также имитатор аэродинамического воздействия в виде двух грузов 6 и 7, Грузы 6 и 7 присоединены при помощи двух гибких нитей 8 и 9 к стержню 3 в точке, соответствующей центру давления несущей поверхности, В устройство входит также транспортир 12, закрепленный своим центром в точке соединения металлической цепочки 1 и модели несущей поверхности. В вертикальном щите 2 выполнен вертикальный паз, в котором установлен ролик 13, и через него перекинута гибкая нить 9, 2 ил. ел с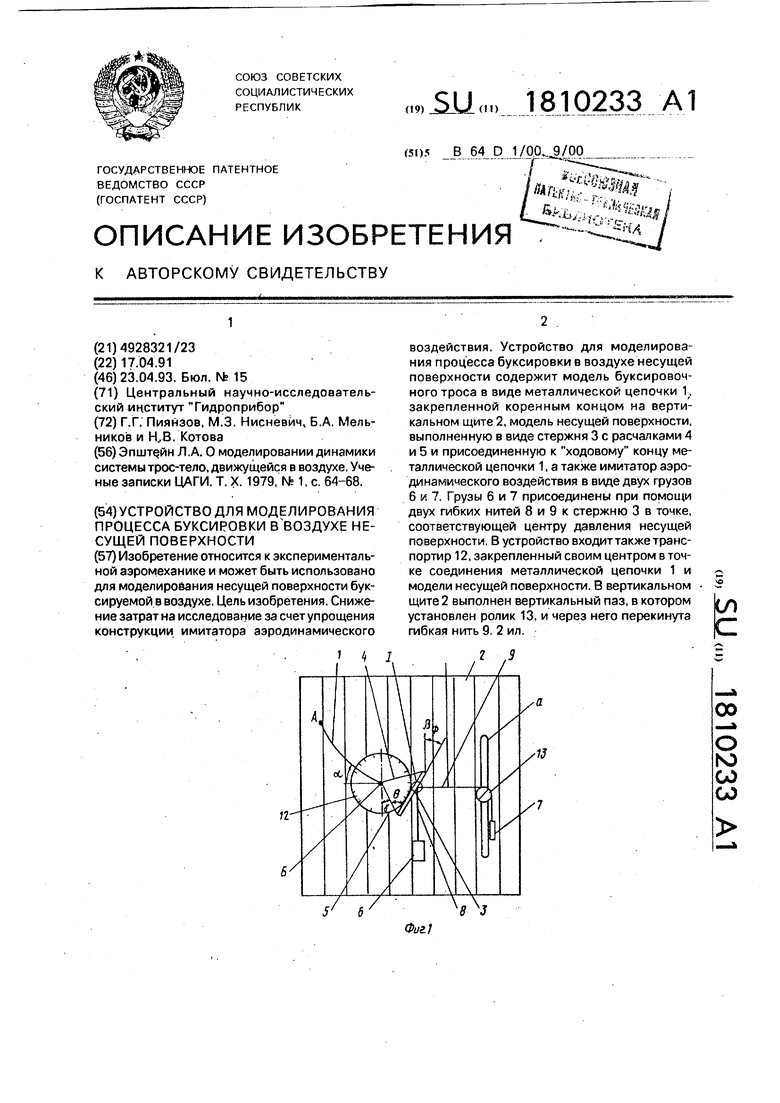
| Эпште,йн Л.А | |||
| О моделировании динамики системы трос-тело, движущейся в воздухе | |||
| Ученые записки ЦАГИ | |||
| Т | |||
| X | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
