ФиЦ
Изобретение относится к морской сейсморазведке, в частности к устройствам для моделирования геометрических и силовых характеристик буксируемой линейной группы сейсмических приборов, включающей в себя хвостовой буй, поплавки с подводными крыльями и буксировочный трос.
Целью изобретения является расширение класса решаемых задач морской сейс
моразведки за счет определения силовых и
геометрических характеристик буксируемой линейной группы сейсмических приборов.
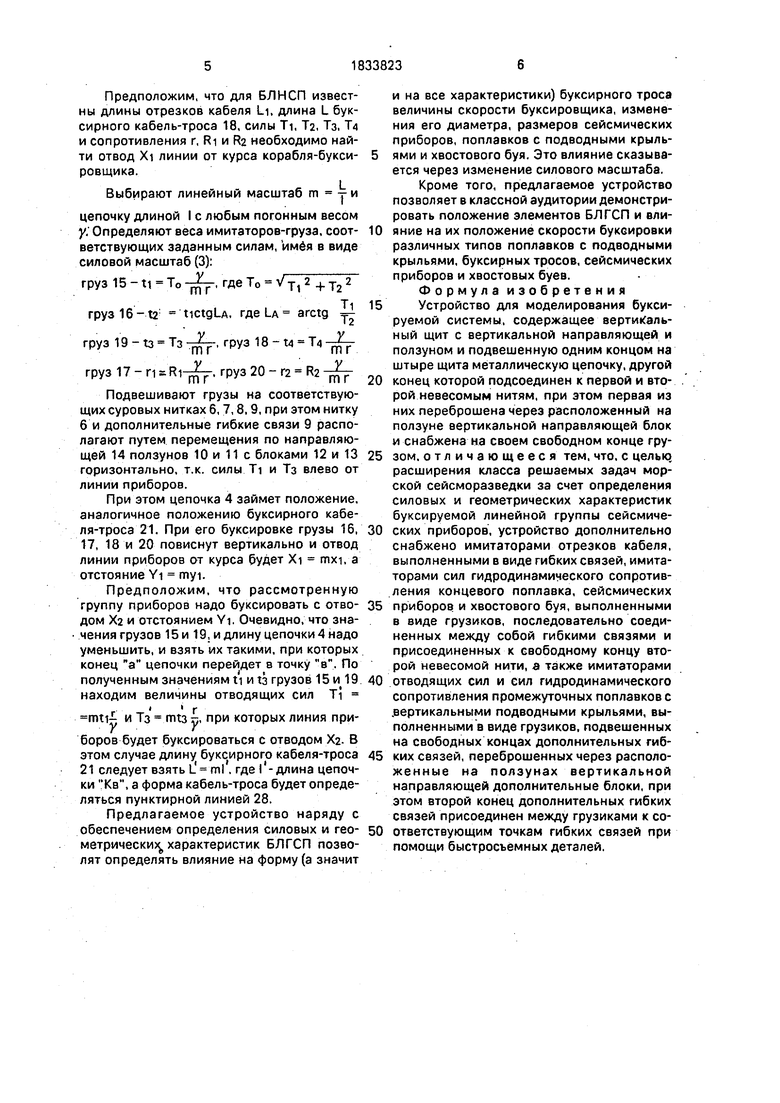
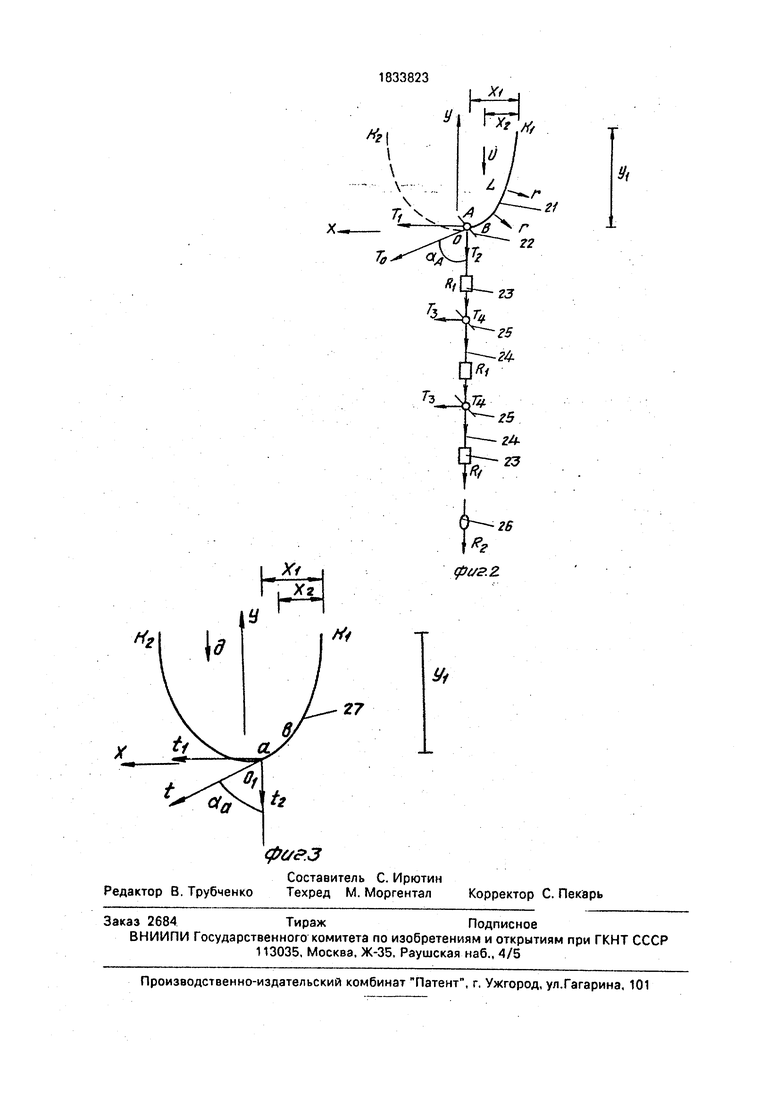
На фиг. 1 показано предлагаемое устройство; на фиг.2 - схема буксируемой ли- нейной группы сейсмических приборов, включающей в себя хвостовой буй, поплавки с подводными крыльями, сейсмические приборы и буксируемый трос; на фиг.З .- металлическая цепочка, подвешенная за оба конца.
Устройство содержит вертикальный щит 1, штырь 2, кольцо 3. металлическую цепочку 4, кольца 5, суровые нити б, 7. 8 и дополнительные гибкие связи 9, ползуны 10 и 11 с блоками 12 и 13, направляющую 14, грузы 15,16,17,18,19 и 20. Цепочка 4 одним своим концом к подвешена при помощи кольца 3 на штыре 2, а другим концом а присоединена к двум нитям 6 и 7, из которых нить 6 переброшена через расположенный на ползуне 10 вертикальной направляющей 14 блок 12 и снабжена грузом 15. В обоснование имитаторов, которыми снабжено предлагаемое устройство, приведем следу- ющие рассуждения.
Буксируемая линейная группа сейсмических приборов(БЛГСП)состоитиз буксирного кабель-троса 21, коренным концом КГ закрепленного на корме суднэ-буксировщи ка, на другом конце А буксирного троса 21 расположен концевой поплавок с отводящим подводным крылом 22, к которому присоединена линейная группа сейсмических приборов 23, соединенных между собой от- резками кабеля 24 (фиг.2). По всей линии присоединены промежуточные поплавки с отводящими подводными крыльями 25, на конце линии присоединен хвостовой буй 26. При буксировке линии группы сейсмических приборов поплавки с отводящими подводными крыльями 22 и 25 отводят ее по траверзу (под действием сил Ti и Тз), при этом действием сил Ti и JA, и гидродинамических сопротивлений Pi и Ра поплавков с крылья- ми 22 и 25, и хвостового буя 26, линия принимает прямолинейную форму, а буксируемый трос 21 под действием гидродинамических сопротивлений и натяжения То поплавка с отводящим подводным кры5
0
5 0
5 0 5
0 5 0 5
лом 24 - часть форму катерной кривой KiOK2, уравнение которой имеет вид:
V ° ( - Y -
-г сп у
где Т0 - натяжение на конце А буксирного троса 18.
г- погонное гидродинамическое сопротивление буксирного троса 16, обтекаемого потоком жидкости со скоростью буксировки v под углом 90°;
X и Y - координаты буксирного троса 21, принимающего при буксиро вке со скоростью v часть KiA формы катерной кривой с началом координаты в точке О (см.фиг,2).
Известно, что металлическая цепочка 27, подвешенная за концы КчКа, принимает форму цепной линии, уравнение которой имеет вид
. .yVH(ChЈx-1)
где ti - горизонтальная составляющая натяжения металлической цепочки 24;
у-погонная масса ее;
х и у - координаты металлической цепочки 27, принимаемой в поле силы тяжести g форму цепной линии с началом координат в точке Oi (см.фиг.З).
Из рассмотрения уравнения (1) и (2) следует, что:
-натяжение Т0 соответствует ti;
-погонное гидродинамическое сопротивление г - погонной массе у;
-координаты X и Y - х и у;
-форма катерной кривой KiOKa-форме цепной линии KiOiK2.
Отсюда можно сделать вывод, что силовые и геометрические характеристики Б Л ГСП могут быть найдены при помощи металлической цепочки, подвешенной соответствующим образом.
Из рассмотрения (1) и (2} также следует, что форма буксирного троса 18 будет подобна отрезку металлической цепочки 4, если будут соблюдены силовой и линейный масштабы:
То mti ,,. То rQ)
или гY
X XJ- m х уТ V
m ti
(4)
где L и I - длина буксирного троса 18 и металлической цепочки 4;
m - линейный масштаб.
Очевидно, что Имитаторами сил Ti, Та, Тз, Т4, Pi и Ра являются соответствующие им грузы ti, ta, 13, t4, n, га, а имитаторами отрезков кабеля - соответствующие им гибкие связи (например, в виде суровых ниток).
Работа с устройством осуществляется в следующей последовательности,
Предположим, что для БЛНСП известны длины отрезков кабеля LL длина L буксирного кабель-троса 18, силы Ti, Tz, Тз, ТА и сопротивления г, RI и Ra необходимо найти отвод Xi линии от курса корабля-буксировщика.
Выбирают линейный масштаб m у и
цепочку длиной I с любым погонным весом у. Определяют веса имитаторов-груза, соответствующих заданным силам, имея в виде силовой масштаб (3):
груз 15 - ti То , где То - VTl2+T22 груз16-12 tictgLA, где LA arctg Д
- ti Тч -t-
груз 19 - t3 Тз
ТПГ
груз 18-t4 T4-
груз 17-ri , груз20-Г2 Р2
У rnr - - mr
Подвешивают грузы на соответствующих суровых нитках 6, 7,8,9, при этом нитку 6 и дополнительные гибкие связи 9 располагают путем перемещения по направляющей 14 ползунов 10 и 11 с блоками 12 и 13 горизонтально, т.к. силы. Ti и Тз влево от линии приборов.
При этом цепочка 4 займет положение, аналогичное положению буксирного кабеля-троса 21. При его буксировке грузы 16, 17, 18 и 20 повиснут вертикально и отвод линии приборов от курса будет Xi mxi, a отстояние Yi myi.
Предположим, что рассмотренную группу приборов надо буксировать с отводом Ха и отстоянием YI. Очевидно, что значения грузов 15 и 19, и длину цепочки 4 надо уменьшить, и взять их такими, при которых конец а цепочки перейдет в точку в. По полученным значениям ti nta грузов 15и 19 находим величины отводящих сил Ti
mti-t и Тз mta Ј, при которых линия приборов будет буксироваться с отводом Х2. В этом случае длину буксирного кабеля-троса 21 следует взять ml. где I1- длина цепочки Кв, а форма кабель-троса будет определяться пунктирной линией 28.
Предлагаемое устройство наряду с обеспечением определения силовых и гео- метрически характеристик БЛГСП позволят определять влияние на форму (а значит
и на все характеристики) буксирного троса величины скорости буксировщика, изменения его диаметра, размеров сейсмических приборов, поплавков с подводными крыльями и хвостового буя. Это влияние сказывается через изменение силового масштаба.
Кроме того, предлагаемое устройство позволяет в классной аудитории демонстрировать положение элементов БЛГСП и влияние на их положение скорости буксировки различных типов поплавков с подводными крыльями, буксирных тросов, сейсмических приборов и хвостовых буев.
Ф о р м у л а и з о б р ет е н и я
Устройство для моделирования буксируемой системы, содержащее вертикальный щит с вертикальной направляющей и ползуном и подвешенную одним концом на штыре щита металлическую цепочку, другой
конец которой подсоединен к первой и второй невесомым нитям, при этом первая из них переброшена через расположенный на ползуне вертикальной направляющей блок и снабжена на своем свободном конце грузом. отличающееся тем, что. с целью, расширения класса решаемых задач морской сейсморазведки за счет определения силовых и геометрических характеристик буксируемой линейной группы сейсмических приборов, устройство дополнительно снабжено имитаторами отрезков кабеля, выполненными в виде гибких связей, имитаторами сил гидродинамического сопротивления концевого поплавка, сейсмических
приборов и хвостового буя, выполненными в виде грузиков, последовательно соединенных между собой гибкими связями и присоединенных к свободному концу второй невесомой нити, а также имитаторами
отводящих сил и еил гидродинамического сопротивления промежуточных поплавков с .вертикальными подводными крыльями, выполненными в виде грузиков, подвешенных на свободных концах дополнительных гибких связей, переброшенных через расположенные на ползунах вертикальной направляющей дополнительные блоки, при этом второй конец дополнительных гибких связей присоединен между грузиками к соответствующим точкам гибких связей при помощи быстросъемных деталей.
9i
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| Вычислительное устройство | 1985 |
|
SU1275475A1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1986 |
|
SU1316014A1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Чертежный прибор | 1984 |
|
SU1240635A1 |
Использование: в морской сейсморазведке, в частности при моделировании геоVt метрических и силовых характеристик буксируемой линейной группы сейсмических приборов. Сущность изобретения: устройство для моделирования снабжено имитаторами отрезков кабеля, которые выполнены в виде гибких связей 7, 8. А также имитаторами сил гидродинамического сопротивления в виде грузиков 16, 17, 18 последовательно соединенных между собой гибкими связями. При этом имитаторы отводящих сил выполнены в виде грузиков 19, подвешенных на свободных концах дополнительных гибких связей 9, переброшенных через блок 13, соединенный с ползунами 10 на направляющей 14. 3 ил. ч Зх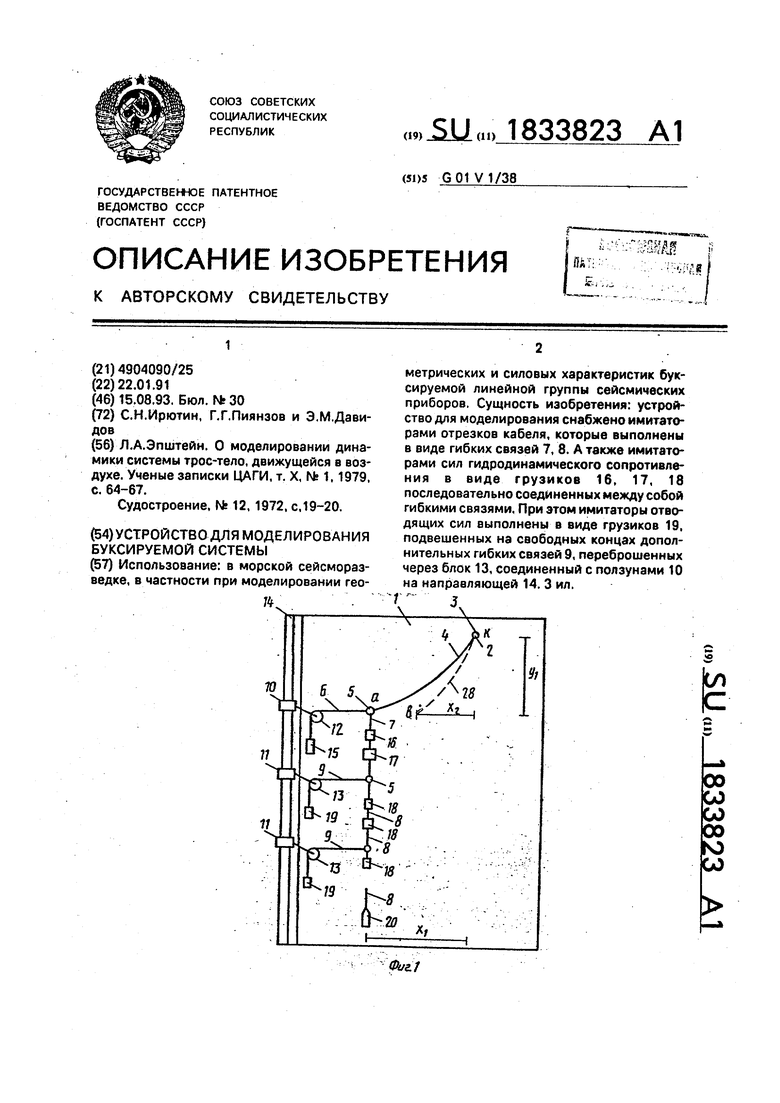
Нг
срс/Р.З
У1
| Л.А.Эпштейн, О моделировании динамики системы трос-тело, движущейся в воздухе | |||
| Ученые записки ЦАГИ, т | |||
| X, № 1,1979, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Судостроение, № 12, 1972, с.19-20. | |||
