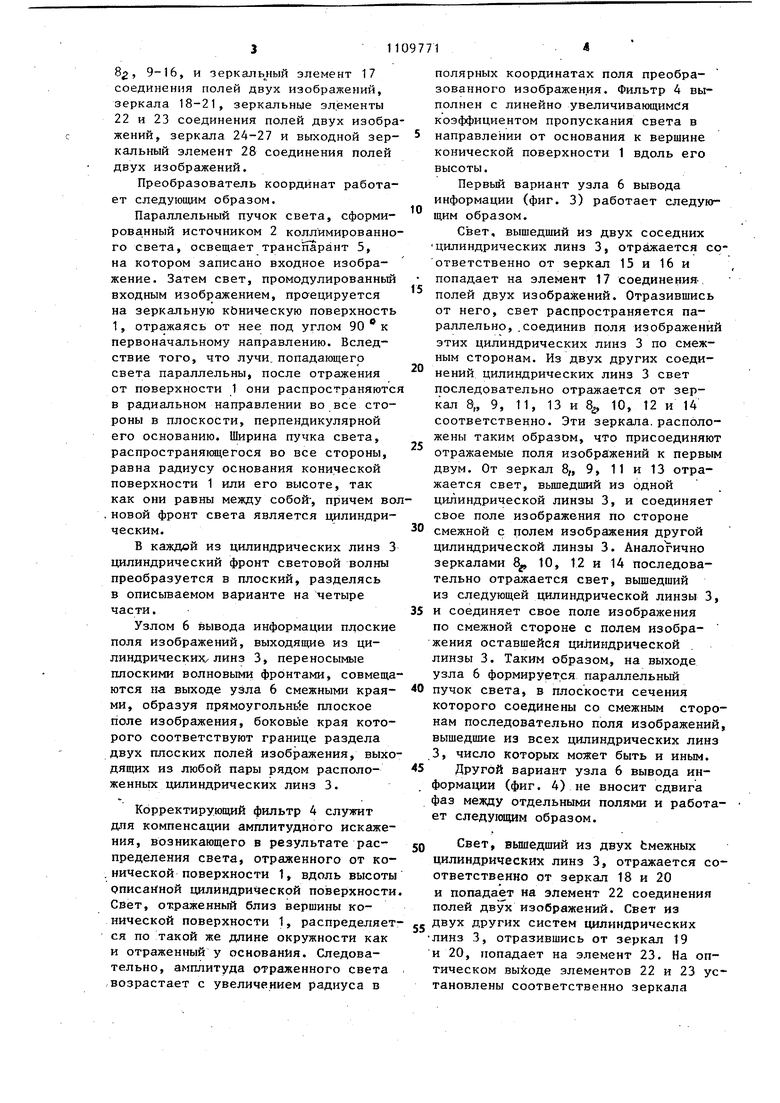
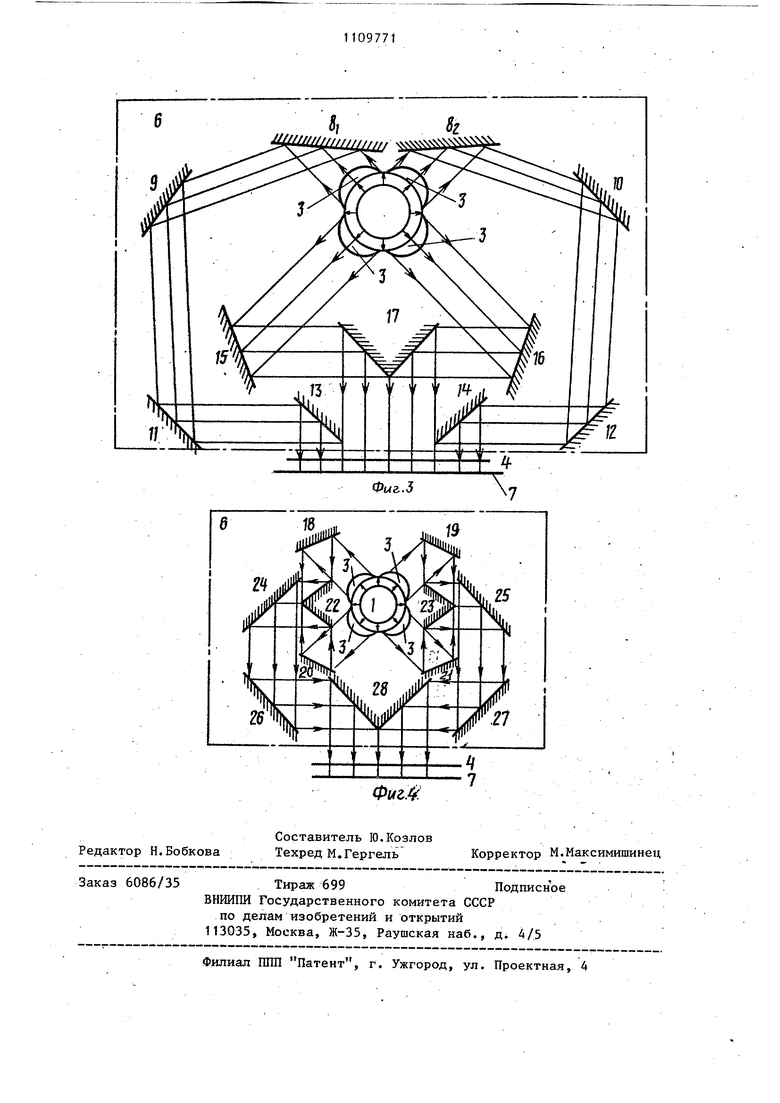
Изобретение относится к оптическо обработке информации и вычислительной технике и может быть использовано в оптических вычислительных устро ствах, в устройствах распознавания и идентификации. Известно устройство, содержащее телеприемник, изображение в котором . представляется в виде последовательности электрических сигналов, модулятор света, принимающий эти сигналы в соответствии с ними модулирующий свет от источника света, дефлектор, который адресует модулированный свет в Соответствии с сигналами от ЭВМ U. Недостатками этого устройства явл ются низкое быстродействие, недостаточное разрешение и точность вследствие дискретности обработки. Известны также преобразователи координат, основанные на использовании волоконно-оптического преобразователя, позволяющего трансформировать исходное изображение 12. Недостатки таких преобразователей заключаются в высокой технологической трудности их практической реализации, недостаточно высоком разрешении вследствие использования волокон но-оптических световодов. Наиболее близким к изобретению является оптический преобразователь, используемый для записи полной информации об объекте на голограмму. На одной оптической оси последовательно расположены источник когерент ного света, коллиматор, полупрозрачный зеркальньй конус, охваченный регистратором, за конусом расположен голографируемый объект. Когерентный свет с помощью коллиматора направляется на конус. На конусе происходит разделение света. Часть его отражает ся от зеркальной повер} ности ив качестве опорного попадает на регист ратор, другая, прошедшая полупрозрач ную поверхность, часть света освещает голографируемый объект. Рассеянный объектом свет также попадает на регистратор С37. Недостатком известного устройств является низкая разрешающая способность из-за отсутствия специализации при вьтолнении преобразования координат, а также из-за использования цилиндрического регистратора. Цель изобретения - повышение разрешающей способности оптического преобразователя координат. Указанная цель достигается тем, что в оптический преобразователь координат, содержащий установленные последовательно на общей оптической оси источник коллимированного света « отражательный элемент, выполненный в виде зеркальной конической поверхности, обращенной вершиной к источнику коллимированного света, а также регистратор, введены транспарант, на котором записано преобразуемое изображение, цилиндрические линзы, узел вывода информации и корректирующий фильтр, причем источник коллимированного света выполнен некогерентным, а узел вывода информации многоканальным, число каналов которого соответствует числу цилиндрических линз, установленных по периметру основания зеркальной конической поверхности -вплотную одна к другой, образующие цилиндрических линз паралотельны общей оптической оси, на которой между источником коллимированного света и вершиной зеркальной конической поверхности в плоскости входного изображения установлен транспарант, вход каждого канала узла вывода инфор1 ации связан с выходом соответствующей цилиндрической линзы, а его выход через корректирующий фильтр оптически связан с соответствующей ч астью входной плоской поверхности регистратора, причем корректирующий фильтр имеет линейно нарастающий коэффициент пропускания света в направлении от основания к вершине зеркальной конической поверхности. I Причем каждый канал узла вывода информации выполнен в виде зеркальной отражающей системы. На фиг. 1 и 2 приведены схемы оптического преобразователя координатJ на фиг. 3 и 4 - варианты реализации узла вывода информации. Перобразователь содержит зеркальную коническую поверхность 1, обращенную вершиной к источнику 2 коллимированного света, цилиндрические инзы 3, корректирующий фильтр 4, транспарант 5, установленный в плоскости высокого напряжения, узел 6 вывода информации и регистратор 7. Кроме того, обозначены зеркала 8f, S, 9-16, и зеркалы1ын элемент 17 соединения полей двух изображений, зеркала 18-21, зеркальные элементы 22 и 23 соединения полей двух изобра жений, зеркала 24-27 и выходной зеркальный элемент 28 соединения полей двух изображений. Преобразователь координат работает следуюищм образом. Параллельный пучок света, сформированный источником 2 коллимированно го света, освещает транспарант 5, на котором записано входное изображение. Затем свет, промодулированный входным изображением, праецируется на зеркальную кЬническую поверхность 1, отражаясь от нее под углом 90 к первоначальному направлению. Вследствие того, что лучи, попадающего света параллельны, после отражения от поверхности 1 они распространяютс в радиальном направлении во все стороны в плоскости, перпендикулярной его основанию. Ширина пучка света, распространякмцегося во все стороны, равна радиусу основания конической поверхности 1 или его высоте, так как они равны между собой-, причем во .новой фронт света является цилиндрическим. В каждой из цилиндрических линз 3 цилиндрический фронт световой волны преобразуется в плоский, разделясь в описываемом варианте на четыре части. Узлом 6 вывода информации плоские поля изображений, выходящие из цилиндрических/линз 3, переносымые плоскими волновыми фронтами, совмеща ются на выходе узла 6 смежными краями, образуя прямоугольнь1е плоское поле изображения, боковые края которого соответствуют границе раздела двух плоских полей изображения, выхо дящих из любой пары рядом расположенных цилиндрических линз 3. Корректирующий фильтр 4 служит для компенсации амплитудного искажения, возникающего в результате распределения света, отраженного от ко. нической поверхности 1, вдоль высоты описанной цилиндрической поверхности Сбет, отраженный близ вершины конической поверхности 1, распределяет ся по такой же длине окружности как и отраженный у основания. Следовательно, амплитуда отраженного света возрастает с увеличением радиуса в полярных координатах поля преобразованного изображения. Фильтр 4 выполнен с линейно увеличивающимся коэффициентом пропускания света в направлении от основания к вершине конической поверхности 1 вдоль его высоты. Первьй вариант узла 6 вывода информации (фиг. 3) работает следующим образом. Свет, вышедщий из двух соседних цилиндрических линз 3, отражается соответственно от зеркал 15 и 16 и попадает на элемент 17 соединения. полей двух изображений. Отразившись от него, свет распространяется параллельно, .соединив поля изображений этих цилиндрических линз 3 по смежным сторонам. Из двух других соединений цилиндрических линз 3 свет последовательно отражается от зеркал 8,, 9, 11, 13 и 8, 10, 12 и 14 соответственно. Эти зеркала, расположены таким образом, что присоединяют отражаемые поля изображений к первым двум. От зеркал 8,, 9, 11 и 13 отражается свет, вышедший из одной цилиндрической линзы 3, и соединяет свое поле изображения по стороне смежной с полем изображения другой цилиндрической линзы 3. Аналогично зеркалами 8, 10, 12 и 14 последовательно отражается свет, вышедший из следующей цилиндрической линзы 3, и соединяет свое поле изображения по смежной стороне с полем изображения оставшейся цилиндрической линзы 3. Таким образом, на выходе узла 6 формируется параллельный пучок света, в плоскости сечения которого соединены со смежным сторонам последовательно поля изображений, вышедшие из всех цилиндрических линз 3, число которых может быть и иным. Другой вариант узла 6 вывода информации (фиг. 4) не вносит сдвига фаз между отдельными полями и работает следу101цим образом. Свет, вьшедший из двух Ьмежных цилиндрических линз 3, отражается соответственно от зеркал 18 и 20 и попадает на элемент 22 соединения полей двух изображений. Свет из двух других систем цилиндрических линз 3, отразившись от зеркап 19 и 20, попадает на элемент 23. На оптическом выводе элементов 22 и 23 установлены соответственно зеркала 24 и 25, отражающие свет в одном направлении под углом 90 к первоначальному. От зеркала 24 свет попадает на зеркало 26, а от зеркала - 25 на зеркало 27. Зеркала 26 и 27 отраж т свет на элемент 28 соединения полей двух изображений. Таким образом, на выходе выходного элемент 28 формируется пучок света, в плоскости сечения которого образовано поле изображения, соответствующее ,преобразованному в. полярные координа ,ты .исходному изображению. Преобразование Координат осуществляется следующим образом. Известно, что окружность в декартовых координатах (X, У), проведенна относительно точки начала координат О, представляет собой прямую линию в полярных координатах Г, ф .Если предстаВ|ИТЬ все поле изображения в декартовых координатах, заполненным такими окружностями разных радиусов: 1|, , то поле изображения в полярных координатах .заполнено прямыми линиям параллельными оси углов f . Запише на транспарант 5, устанавливаемый в плоскости входного изображения, набор концентрических окружностей с центром, совпадающим с продолжением оси конической поверхности 1, а такж с центром О декартовых координат исходного поля изображения. Рассмотрим преобразование двух любых из них, например,-с радиусами у), и j . Спроецированные на поверхность 1, они попадают на соответствукщие окру ности отражающей конической поверхно ти 1, удаленные от ее вершины по его высоте на расстояние,и, отразившись от зеркальной поверхности 1, свет, несущий инфоргмацию об окружностях, попадает на цилиндрическую поверхность по которой установлены цилиндрические линзы 3. Спроецированные окружности оказываются равными между собой и равны длине окружности цилиндрической поверхности. Их.расстояния от плоскости, проходящей через вершину конической поверхности, перпендикулярной его оси, равны 1, и соответственно. Таким образом, если зафиксировать изображение на цилиндрической поверхности, разделить ее по одной из образующей и развернуть, получим плоскую прямоугольную поверхность, на котброй расположены две прямые линии на высоте Y и Гг от основания, т.е. по оси радиусов. Разворот по длине окружности цилиндрической поверхности изображения в плоскую происходит в результате коллимации расходящегося от поверхности 1 света цилиндрическими линзами 3. В каждом из полученных четырех пучков света поле изображения плоское и соответствует 1/4 преобразованного поля по оси углов P . Таким образом, в каждом- из четырех пучков света переносится часть поля изображения преобразованных окружностей в полярных координатах, составляющая один квадрант исходных декартовых координат или Jt/2 часть полярных. Узлом 6 поля изображения соединяются по смежным сторонам в выходное поле изображения. Фильтр 4 может быть изготовлен на фотопластине фотоспособом. Эффективность преобразователя вытекает из того, что он осуществляет преобразование изображения из декартовых координат в полярные (возможно и обратное преобразование) оптическим методом, в аналоговом виде. Разрешающая .сгГособность преобразования определяется точностью изготовения простых оптических элементов, что обуславливает технико- экономическую эффективность предлагаемого преобразователя. Экспериментальная роверка работы оптического преобазователя координат на физической одели подтверждает его высокую эфективность. 3
0we.i2 4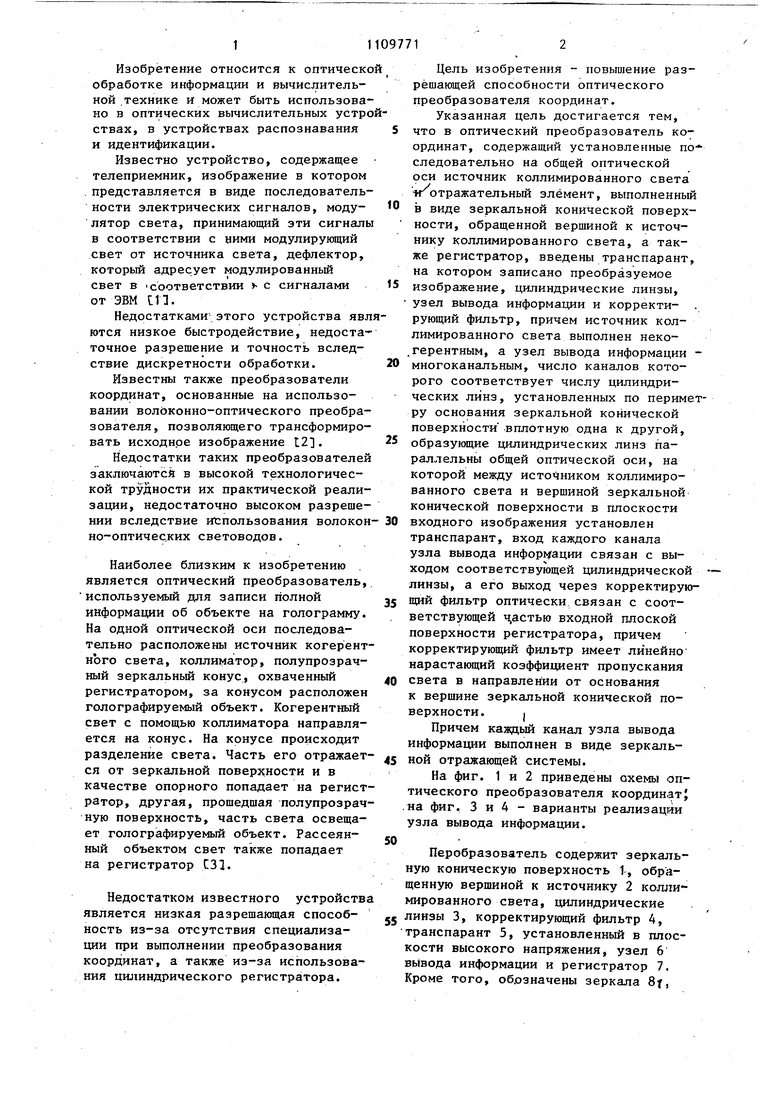
1. ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ КООРДИНАТ, содержащий установленные последовательно на общий оптической оси источник коллимированного света и отражательный элемент, выполненный в виде зеркальной конической поверхности, обращенной вершиной к источнику коллимированного света, а также регистратор, отличающийся тем, что, с целью повышения разрешакнцей способности преобразователя, в него введены тран.спарант, на котором записано преобразуемое изображение, цилиндрические линзы, узел вывода информации и корректирующий фильтр, причем источник коллимированного света выполнен не- когерентным,-а узел вывода инфррмации - многоканальным, число каналов которого сооответствует числу цилиндрических линз, установленных по периметру основания зеркальной конической поверхности вплотную одна к другой, образующие цилиндрических линз параллельны общей оптической оси, на которой между источником коллимированного света и вершиной зеркальной конической поверхности в плоскости входного изображения установлен транспарант, вход каждого канала узла вывода информации связан с выходом соответствующей цилинд(Л ррческой линзы, а его выход через корректирующий фильтр оптически свяcz зан с соответствукнцей частью входной плоской поверхности регистратора, причем корректирующий фильтр имеет линейно нарастающий коэффициент пропускания света в напргавлении от основания к вершине зеркальной конической поверхности. ;о 2. Преобразователь по п. 1, о т м личающийся тем, что в нем канал узла вывода информации выполнен в виде зеркальной отражающей системы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Casasent D., Psaltis D | |||
| Position, rotation abd scale invariant optical correlation | |||
| - Appl | |||
| Opt., 1976, 15, № 7, p | |||
| Деревянный понтон с фанерной обшивкой | 1925 |
|
SU1799A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Объемное и квазиобъемное представление информации | |||
| М., Энергия, 1975, с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
