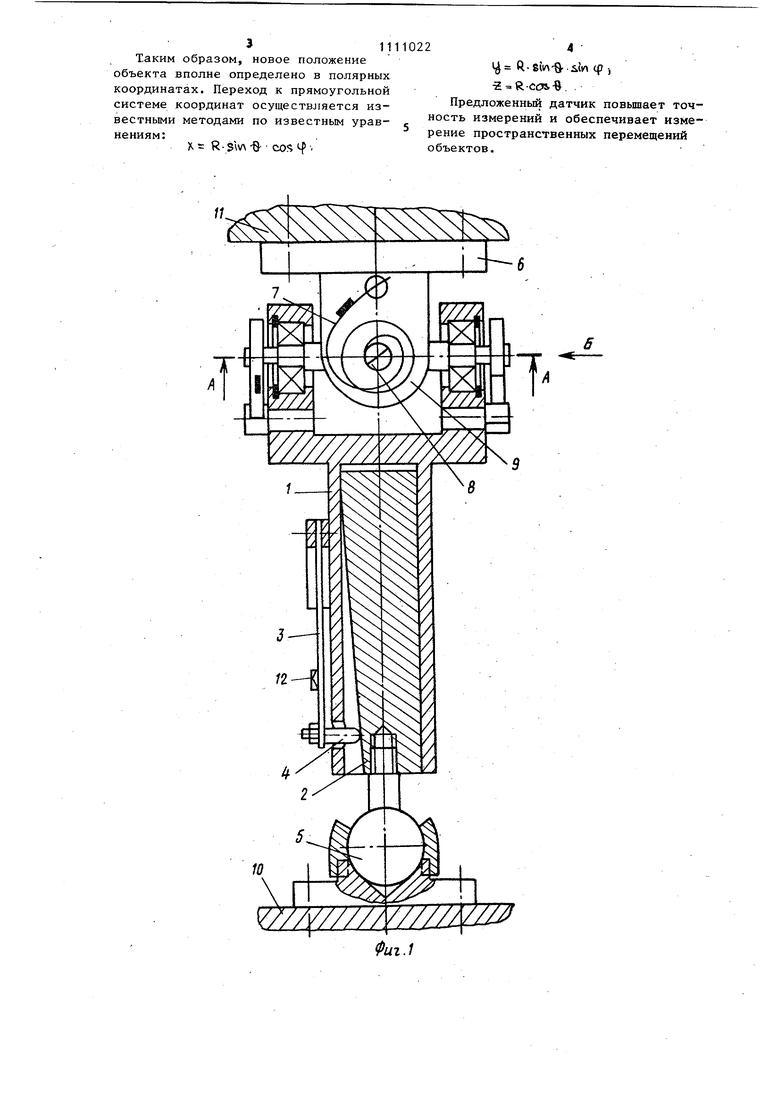
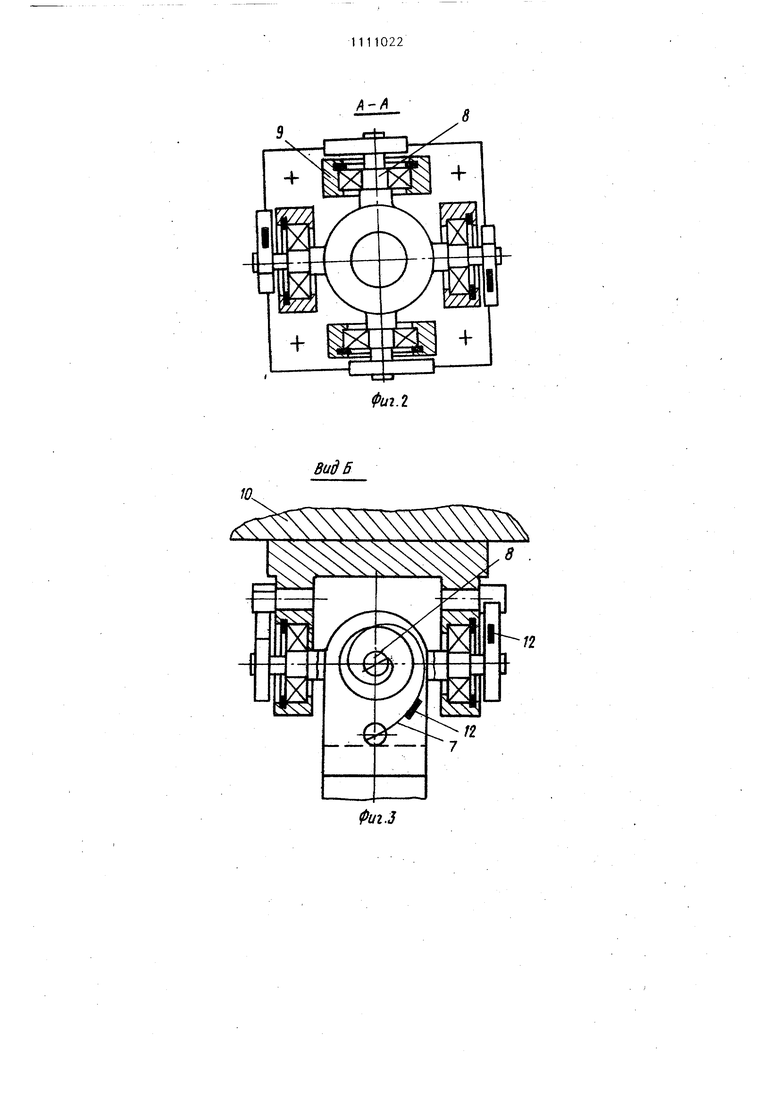
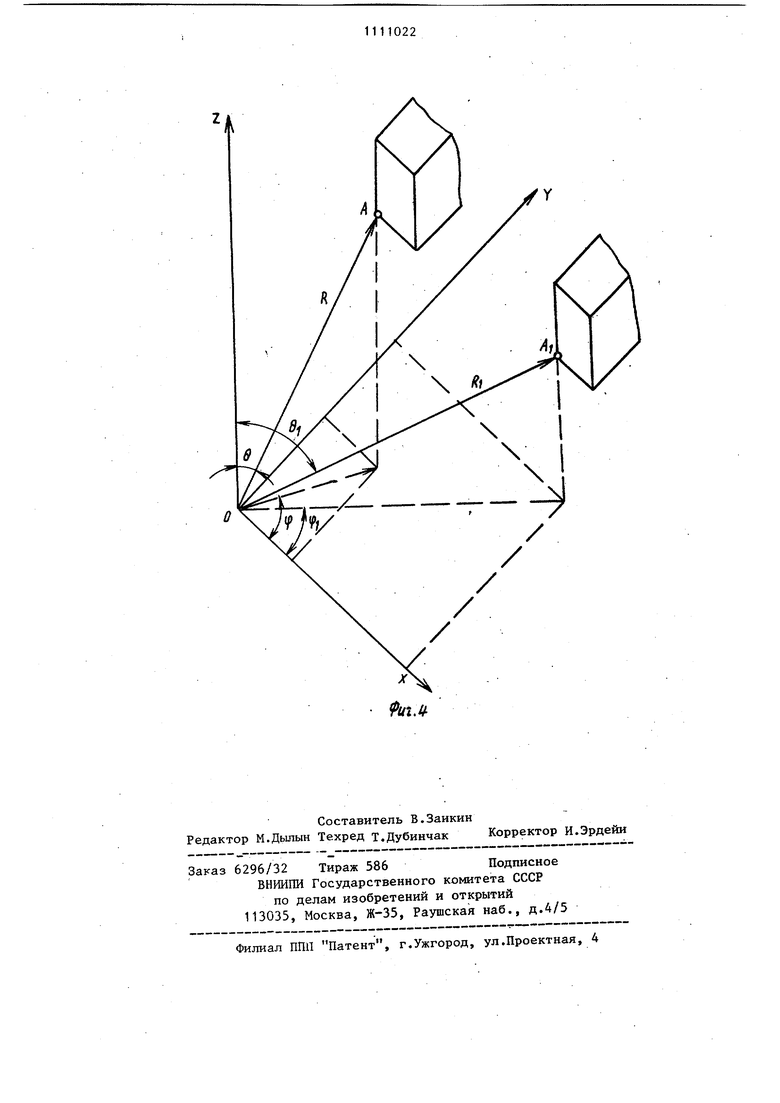
Изобретение относится к измерительной технике, а именно к устройс вам измерения пространственных пере мещений объекта. Известен датчик измерения пространственных перемещений объекта, содержащий корпус, тензобалку, один ко нец которой жестко связан с корпусом а второй конец через шток соединен с объектом СП. Недостатками такого конструктивного исполнения датчика пространственных перемещений являются малый диапазон измеряемых перемещений и из мерение перемещений только по оси штока, т,е, по одной координате. Известен также датчик для измерения пространственного перемещения объекта, содержащий корпус, клин, установленный в корпусе с возможноетью поступательного перемещения, и тензобалку, один конец которой жестко связан с корпусом, а второй через промежуточный элемент опирается на клин. Клин соединяется с объектом, перемещения которого измеряют. При поступательном перемещении клина тен зобалка деформируется и изменение со противления ее тензорезисторов дает информацию о перемещении объекта. Вы бором угла клина можно получать заданный диапазон перемещения 121. Недостатком известного конструктивного исполнения датчика является отсутствие возможности одновременного измерения перемещения объекта по трем координатам. Установка же трех датчиков во взаимно перпендикулярных плоскостях не всегда возможна и не дает достоверной информации, так как исследуем1 1Й объект может иметь сложную траекторию перемещений и сложную форму поверхности. Цель изобретения - повьш1ение точности измерений и расширение функционапьных возможностей датчика пространственных перемещений путем одновременного измерения перемещений по трем координатам. Поставленная цель достигается тем что датчик для измерения пространственного перемещения объекта, содержащий корпус, клин, установленный в корпусе с возможностью поступательно го перемещения и тензобалку, один ко нец которой жестко связан с корпусом а другой через промежуточный элемент опирается на клин, снабжен сферическим шарниром, жестко связанным с кли ном и предназначенным для связи с объектом, карданным шарниром, жестко связанным с корпусом, и спиральными тензоэлементами, концы каждого из которых жестко связаны с соответствующими осью и корпусом подшипника карданного шарнира. На фиг.1 изображен датчик для измерения пространственных перемещений, осевой разрез на фиг.2 - сечение А-А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 - схема перемещения датчика в пространстве. Датчик содержит корпус 1, клин 2, установленный в корпусе с возможностью поступательного перемей ения, и тензобалку 3, один конец которой жестко связан с корпусом 1, а другой через промежуточный элемент 4 опирается на клин 2, сферический шарнир 5 жестко соединенньй с клином 2, карданный шарнир 6, жестко соединенный с корпусом 1, спиральные тензоэлементы 7, концы каждого из которых жестко связаны с соответствующими осью 8 и корпусом подшипника 9 карданного шарнира 6. Сферический шарнир 5 соединен с объектом 10 измерения, а карданный шарнир 6 - с базовой поверхностью 11. Тензобалка 3 и спиральные тензоэлементы 7 имеют тензодатчики 12. Датчик работает следующим образом. Сферический шарнир 5 перемещается вместе с объектом 10 и увлекает за собой клин 2. Перемещение клина 2 относительно корпуса 1 через промежуточный элемент 4 вызывает деформацию тензобалки 3. которая преобоазуется в изменение сопротивления тензодатчика 12. Одновременно происходит поворот карданного шарнира 6. При этом ось 8 поворачивается относительно корпуса подшипника 9 и напрягает спиральный тензоэлемент 7, деформация которого преобразуется в изменение сопротивления датчика 12. Пример перемещения датчика в пространстве при изменении положения объекта из точки А в точку А показан на фиг.4. При этом расстояние между точками закрепления сферического шарнира 5 и карданного шарнира 6 датчика изменяется от R. до R , а угловое положение осей 8 относительно корпусов подшипников 9 - от 5- до -д- и от У до р . Датчик зафиксирует приращения:атчик зафиксирует приращения: A.Rt.R.rf. 4f 9i-fi л-d e -Q3111102Таким образом, новое положение объекта вполне определено в полярных координатах. Переход к прямоугольной системе координат осуществляется известными методами по известным урав- j нениям: х со5;Ч -. 2 Ц R-sii 8 iM Ф i Z . Предложенный датчик повышает точность измерений и обеспечивает измерение пространственных перемещений объектов.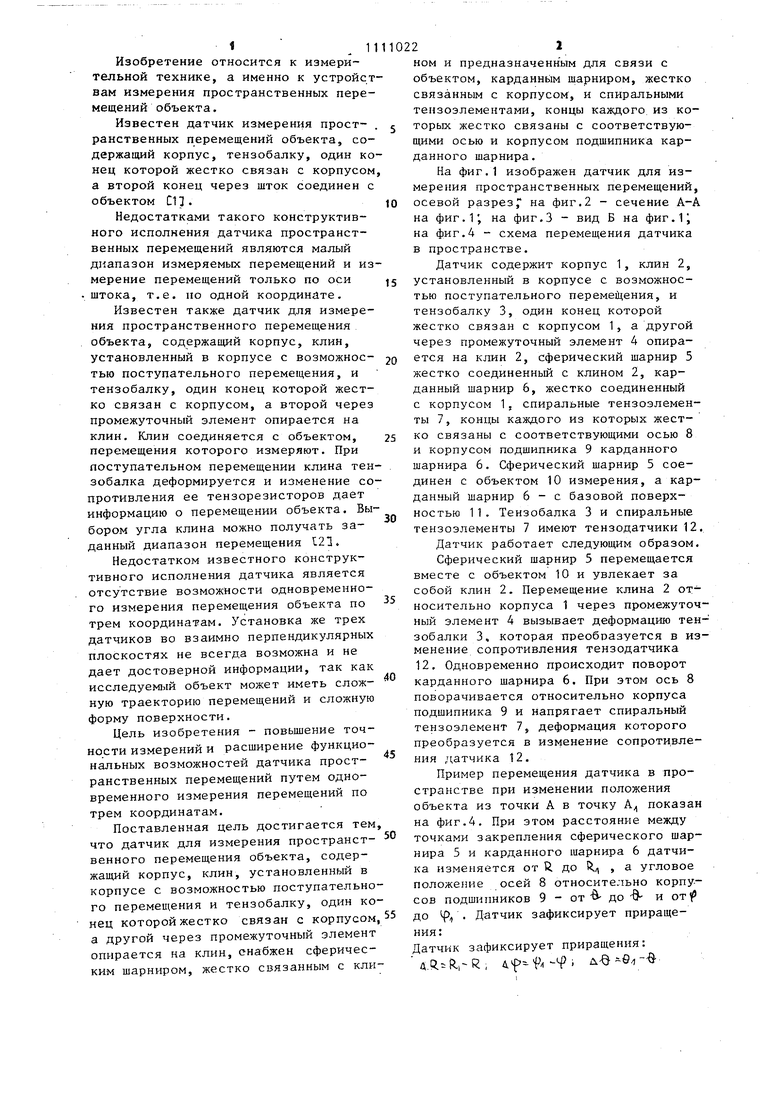
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2051329C1 |
| Преобразователь давления | 1977 |
|
SU877375A1 |
| Устройство для контроля внутреннего диаметра трубы | 1990 |
|
SU1798612A1 |
| Устройство для измерения деформациипРи лиТЕйНОй уСАдКЕ МЕТАллОВ | 1978 |
|
SU848978A1 |
| Инструментальная головка | 1983 |
|
SU1094677A1 |
| Устройство для испытания на трение и изнашивание сопряжений типа вал-втулка | 1989 |
|
SU1698698A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2194244C2 |
| Тензометр | 1989 |
|
SU1698627A2 |
| Устройство для измерения перемещений | 1983 |
|
SU1153230A1 |
| Стенд для испытания карданного шарнира | 1985 |
|
SU1315851A1 |
.ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПРОСТ-. РАНСТВЕННОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА, содержащий корпус, клин, установлен.ный в корпусе с возможностью поступательного перемещения, и тензобалку, один конец которой жестко связан с корпусом, а другой через промежуточный элемент опирается на клин, от ли ч ающий с я тем, что, с целью повьшения точности и расширения функциональных возможностей, он снабжен сферическим шарниром, жестко свядонным с клином и предназначенным для связи с объектом, карданным шарниром, жестко связанным с корпусом, и спиральными тензоэлементами, конща каждого из которых жестко связаны с соответствующими осью и .корпусом подшипника карданного шарнира.
/;
У7//(
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Васильев А.В., Раппопорт Д.Н | |||
| Тензометрирование и его применение в исследованиях тракторов | |||
| М., Машгиз, 1963, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Власов В.И | |||
| и др | |||
| Приборы и методы исследования кривошипных прессов | |||
| М., НИИМАШ, 1972, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
