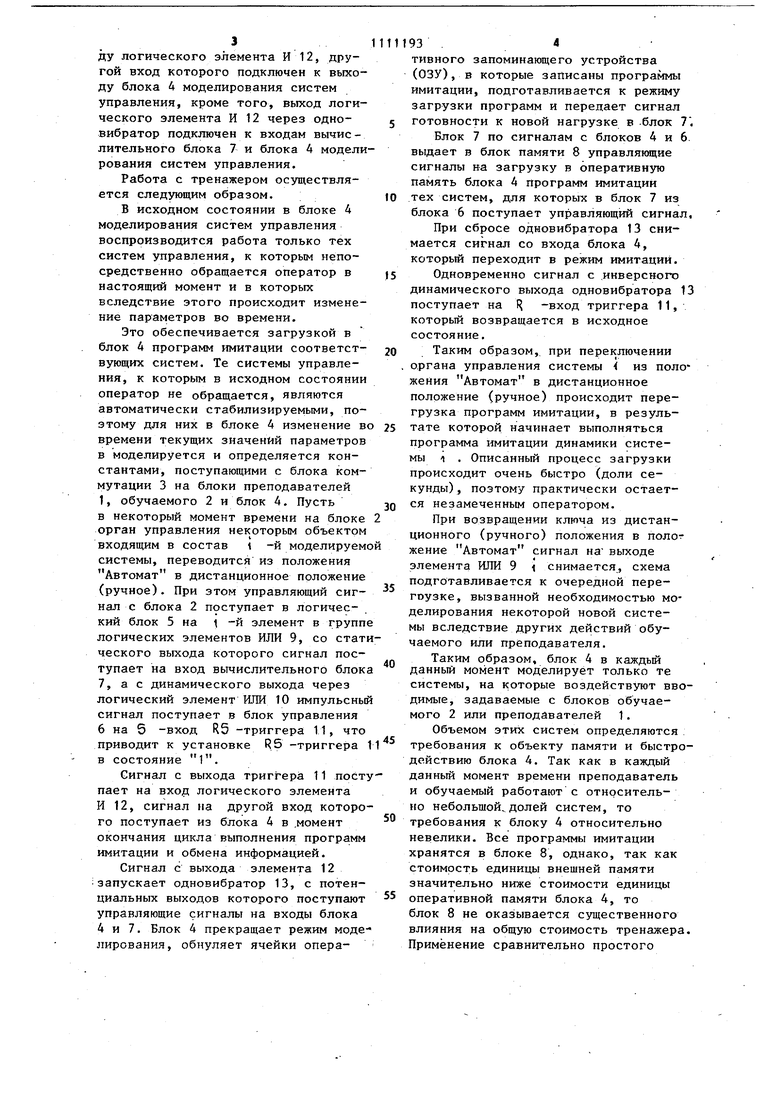
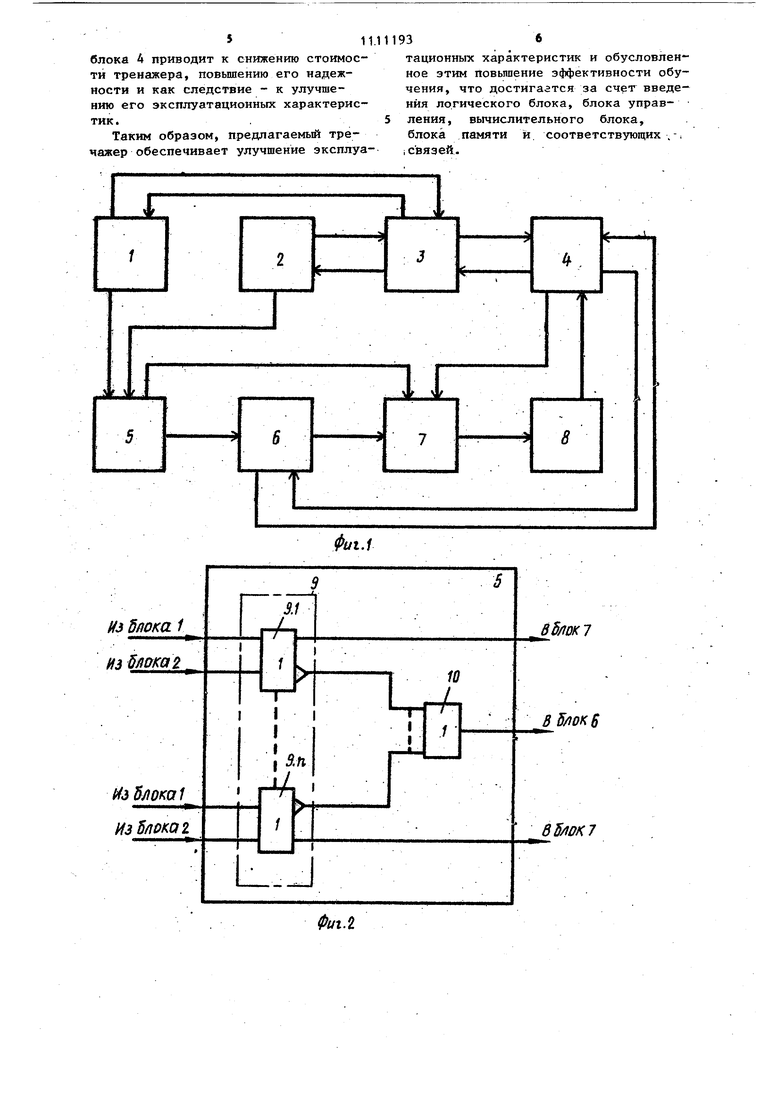
Изобретение относится к автомати ке ,и вычислительной технике, в част ности к тренажерам операторов систем управления, и может быть исполь зовано для обучения профессиональным навыкам операторов систем уп- . равления автоматизированными техническими средствами, например, в судовых обучающих комплексах. Известен тренажер операторов систем управления и содержащий блок преподавателя, обучаемого, модели рования систем управления, диагностики, коммутации, контроля состояния систем и моделирования передачи информации между объектами, связанные между собой по цепям управления, контроля, сигнализации и задания аварийных ситуаций lj. Недостатком данного устройства является невысокая эффективность тренажа. Цель изобретения - повышение эффективности тренажа. Поставленная цель достигается тем, что тренажер операторов систем управления, содержащий блок препода вателей, соединенный первым выходом с первым входом блока коммутации, первый выход которого связан со вхо дом блока преподавателей, блок обучаемого, соединенньн первым выходом со вторым входом блока коммутации, второй выход которого соединен со входом блока обучаемого, третий выход блока коммутации связан с пер вым входом блока моделирования системы управления, первый выход которого подключен к третьему входу блока коммутации, имеет логический блок, блок управления, вычислительный блок и блок памяти, подключенны выходом к второму входу блока моделирования систем управления, третий вход которого соединен с выходо блока управления, а йервый вход бло ка управления связан со вторым выхо дом блока моделирования систем управления, третий выход которого сое динен с первым входом вычислительного блока, второй вход которого связан с первым выходом логического блока, второй выход логического блока соединен со вторым входом бло ка управления, второй выход которого подключен к третьему входу вычис лительного блока, выход которого связан со входом блока памяти, при этом первьй вход логического блока соединен со вторым выходом блока преподавателей, а второй вход логического блока связан со вторым выходом блока обучаемого. На фиг. 1 приведена структурная схема предлагаемого тренажера, на фиг. 2 - схема логического блока, на фиг. 3 - функциональная схема блока управления. Тренажер операторов систем управления содержит блок 1 преподавателей, блок 2 обучаемого-, блок 3 коммутации блок 4 моделирования систем управления, логический блок 5; блок 6 управления J вычислительный блок 7, блок 8 памяти группа логических элементов ИЛИ 9J логический элемент ИЛИ 10; RS -триггер 11; логический (Элемент И 12; одновибратор 13. При этом входы логического блока 5 подключены к выходам взаимосвязанных через блок 3 коммутации с блоком 4 моделирования систем управления блоков 1,2 преподавателей и обучаемого, а выход - непосредственно и через взаимосвязанный с блоком 4 моделирования систем управления блок 6 управления к первому и второму входам вычислительного блока 7, третий вход которого соединен с выходом блока 4 моделирования систем управления, вход которого через блок 8 памяти подключен к выходу вычислительного блока 7. Блок 5 содержит группу логических элементов ИЛИ 9 (в группе П элементов; 9 1 - 1 -и элемент в группе), и логический элемент ИЛИ 10 (где efl.nV При этом группа логических элементов ИЛИ 9 содержит два множества входов, первое из которых для каждого элемента подключено к выходам блока 1 преподавателей, а второе к выходам блока 2 обучаемого, статические выходы каждого элемента подключены к входам вычислительного блока 7, а динамические - через логический элемент ИЛИ 10 - к входу блока управления 6. Блок 6 содержит RS -триггер 11, логический элемент И 12 и одновибратор 13 (фиг. 3). При этом 6 -вход R5 -триггера 11 подключен к выходу логического блока 5, R -вход - к инверсному динамическому выходу одновибратора 13, а выход триггера 11 - к одному вхо3joty логического элемента И 12, другой вход которого подключен к выходу блока 4 моделирования систем управления, кроме того, выход логического элемента И 12 через одновибратор подключен к входам вычис лительного блока 7 и блока 4 модели рования систем управления. Работа с тренажером осуществляется следующим образом. В исходном состоянии в блоке 4 моделирования систем управления воспроизводится работа только тех систем управления, к которым непосредственно обращается оператор в настоящий момент и в которых вследствие этого происходит изменение параметров во времени. Это обеспечивается загрузкой в блок 4 программ имитации соответствующих систем. Те системы управления, к которым в исходном состоянии оператор не обращается, являются автоматически стабилизируемыми, поэтому для них в блоке 4 изменение в времени текущих значений параметров в моделируется и определяется константами, поступающими с блока коммутации 3 на блоки преподавателей 1, обучаемого 2 и блок 4. Пусть в некоторый момент времени на блоке орган управления некоторым объектом входящим в состав -и моделируем системы, переводится из положения Автомат в дистанционное положение (ручное). При этом управляющий сигнал с блока 2 поступает в логический блок 5 на 1 -и элемент в групп логических элементов ИЛИ 9, со стат ческого выхода которого сигнал поступает на вход вычислительного блок 7, а с динамического выхода через логический элемент ИЛИ 10 импульсны сигнал поступает в блок управления 6 на 5 -вход R5 -триггера 11, что приводит к установке R5 -триггера в состояние 1. Сигнал с выхода триггера 11 пост пает на вход логического элемента И 12, сигнал на другой вход которо го поступает из блока 4 в .момент окончания цикла выполнения программ имитации и обмена информацией. Сигнал с выхода элемента 12 запускает одновибратор 13, с потенциальных выходов которого поступают управляющие сигналы на входы блока 4 и 7. Блок 4 прекращает режим моде лирования , обнуляет ячейки опера34тивного запоминающего устройства (ОЗУ), в которые записаны программы имитации, подготавливается к режиму загрузки программ и передает сигнал готовности к новой нагрузке в .блок 7. Блок 7 по сигналам с блоков 4 и 6. выдает в блок памяти 8 управляющие сигналы на загрузку в оперативную память блока 4 программ имитаций тех систем, для которых в блок 7 из блока 6 поступает управляющий сигнал. При сбросе одновибратора 13 снимается сигнал со входа блока 4, который переходит в режим имитаций. Одновременно сигнал с инверсного динамического выхода одновибратора 13 поступает на t -вход триггера 11, которьтй возвращается в исходное состояние. Таким образом, при переключении органа управления системы из поло жения Автомат в дистанционное положение (ручное) происходит перегрузка программ имитации, в результате которой начинает выполняться программа имитации динамики системы 1 . Описанный процесс загрузки происходит очень быстро (доли секунды) , поэтому практически остается незамеченным оператором. При возвращении ключа из дистанционного (ручного) положения в полог жение Автомат сигнал на выходе элемента ИЛИ 9 i снимается, схема подготавливается к очередной перегоузке, вызванной необходимостью моделирования некоторой новой системы вследствие других действий обучаемого или преподавателя. Таким образом, блок 4 в каждый данный момент моделирует только те системы, на которые воздействуют вводимые, задаваемые с блоков обучаемого 2 или преподавателей 1. Объемом этих систем определяются требования к объекту памяти и быстродействию блока 4. Так как в каждый данный момент времени преподаватель и обучаемый работают с относительно небольшой долей систем, то требования к блоку 4 относительно невелики. Все программы имитации хранятся в блоке 8, однако, так как стоимость единицы внешней памяти значительно ниже стоимости единицы оперативной памяти блока 4, то блок 8 не оказывается существенного влияния на общую стоимость тренажера. Применение сравнительно простого блока А приводит к снижению стоимости тренажера, повьшению его надежности и как следствие - к улучшению его эксплуатационных характеристик .. Таким образом, предлагаемьй тречажер обеспечивает улучшение эксплуа113 тационных характеристик и обусловленное этим повьппение эффективности обучения, что достигазтся за счет введения логического блока, блока управления, вычислительного блока, блока памяти и соответствующих.-. iCBHseft.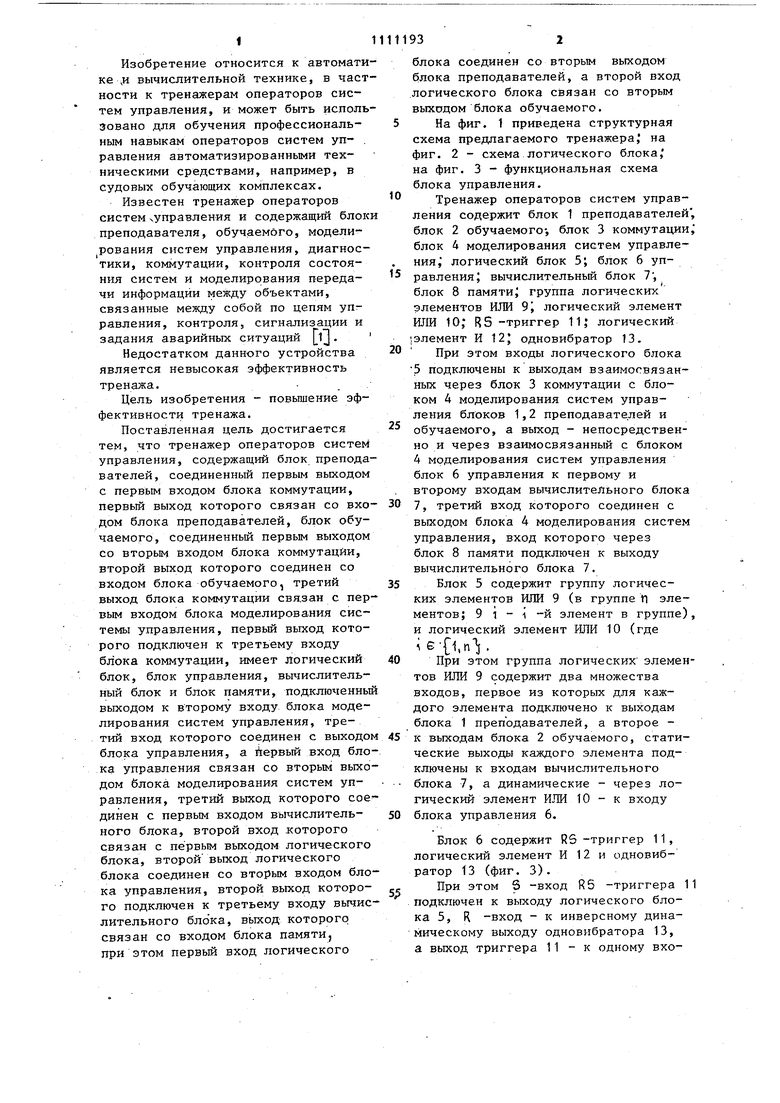
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер операторов систем управ-лЕНия | 1978 |
|
SU845169A1 |
| Устройство для оценки профессиональной пригодности оператора системы управления | 1982 |
|
SU1019478A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| Тренажер оператора автоматизированных систем управления | 1982 |
|
SU1132302A1 |
| Тренажер операторов систем управления | 1981 |
|
SU953652A1 |
| Тренажер оператора радиоэлектронной аппаратуры | 1989 |
|
SU1658193A1 |
| Многопультовый тренажер операторов систем управления | 1981 |
|
SU953651A1 |
| Тренажер операторов систем управления | 1980 |
|
SU968840A1 |
| Тренажер операторов систем управления | 1981 |
|
SU968841A1 |
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |
ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ,содержащий блок преподавателей, соединенный первым выходом с первым входом блока коммутации, первый выход которого связан с входом блока преподавателей, блок обучаемого, соединенный первым выходом с вторым входом блока коммутации, второй выход которого соединен с входом блока обучаемого третий выход блока коммутации связан с первым входом блока моделирования системы управления, первьй выход которого подключен к третьему входу блока коммутации, отличающийся тем что, с целью повьпиения эффективности тренажа, он имеет логический блок, блок управления, вычислитель- ный блок и блок памяти, подключенный выходом к второму входу блока моделирования систем управления, третий вход которого соединен с выходом блока управления, а первый вход блока управления связан с вторым выходом блока моделирования систем управления, третий выход которого соединен с первым входом вычислительного блока, второй вход которого связан с первым выходом логического блока, второй выход логического блока соединен с вторым входом блока управления, второй выход которого подключен к третьему входу вычислительного блока,выход которого связан с входом блока памяти, при этом первьй вход логического блока соединен -с вторым выходом блока преподавателей, а второй вход логического блока связан с вторым выходом блока обучаемого.
Jl L
И
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для контроля и регулирования света в кинокопировальных аппаратах | 1935 |
|
SU45169A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
