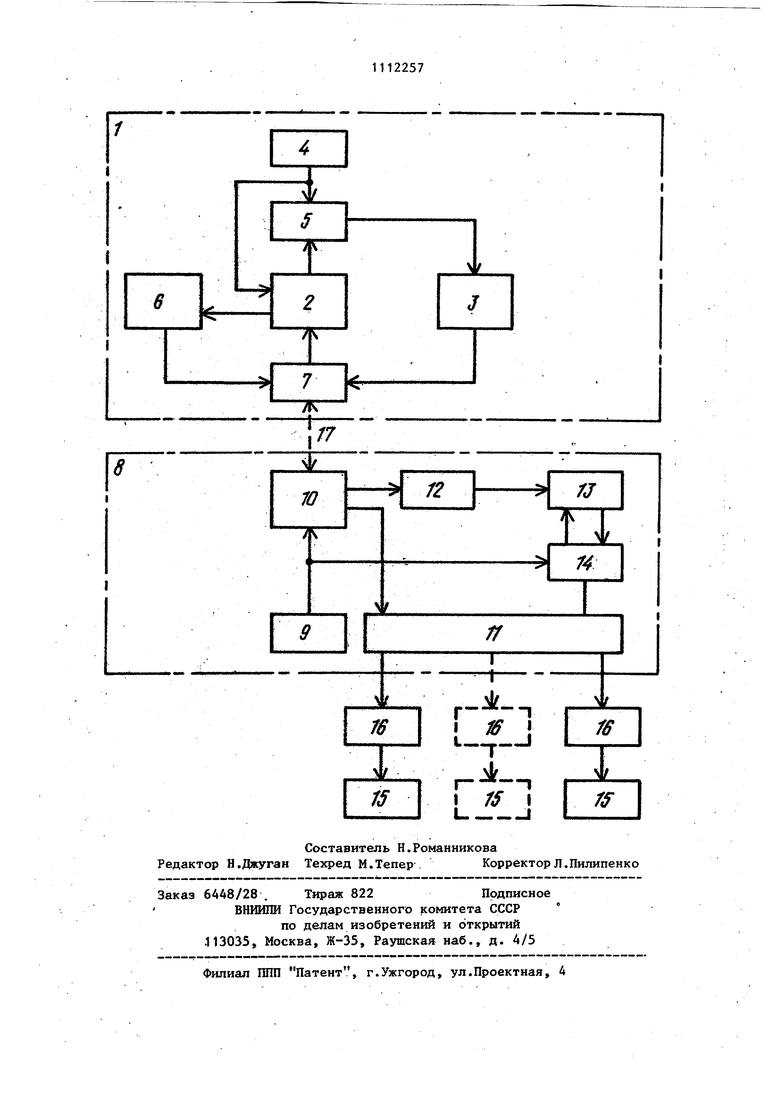
Изобретение относится к устройствам для автоматического отбора проб воды на заданных глубинах в процессе непрерывного зондирования и может . быть применено при гидрофизических, гидрохимических и гидробиологических исследованиях внутренних водоемов, морей и океанов. Известно ус ройство для автоматического отбора проб воды на заданных глубинах, содержащее надводный блок управления, состоящий из блока форми рования управляющих сигналов, элемен та связи и блока цифровой индикации глубины погружения, погружаемый герметичный контейнер с элементом связи блоком приема управляющих сигналов и датчиком давления, подключенным через элемент связи к выходу блока цифровой индикации глубины погружения, выход которого соединен с входом блока формирования управляющих сигналов, пробоотборники и механизмы закрывания их крышек. Устройство позволяет производить отбор проб воды в режиме зондирО Вания автоматичес ки на стандартных глубинах без участия оператора ПЗ. Недостатками данного устройства являются необходимость применения для связи надводного блока управления, расположенного на судне, с аппаратурой погружаемого герметичного контейнера электрического кабеля свя зи, а также невозможность изменения программы зондирования (глубин, на которых должны сработать пробоотборники) при работе в автоматическом режиме, так как программа зондирования постоянно установлена в блоке цифровой индикации глубины погружения . Наиболее близким к изобретению является устройство для автоматического отбора проб воды, содержащее надводный блок управления, состоящий из блока формирования управляющих сигналов, блока цифровой индикации погружения, блока выбора зоны, блока исходных данных, выход kofoporo соединен с первым входом блока выбора зоны, второй вход которого соединен с выходом блока цифровой индикации, выход блока выбора зоны соединен с входом блока формирования управляюще го, сигнала, погружаемый герметичный контейнер с элементом связи, блоком приема управлякяднх сигналов и датчиком давления, пробоотборники и механизмы закрывания их крышек, связанные с соответствунзщиш выходами блока приема управляющих сигналов Г2 Недостатком известного устройства является необходимость применения во время зондирования электрической связи надводного блока управления с аппаратурой погрз жаемого герметичного контейнера, для обеспечения которой используется бронированный одножильный кабель, т.е. невозможность использования погружаемого устройства с пробоотборниками в автономном режиме с применением для силовой связи гидрологического троса. Многие суда, особенно малого водоизмещения, проводящие гидрофизические, гидрохимические и гидробиологические исследования, не снабжены кабельными лебедками, оборудованными токосъемниками, что исключает применение на них устройств для автоматического отбора проб воды. В .этом случае приходится пользоваться традиционными методами отбора проб воды, с использованием батометров БМ-48, подвешиваемых на гидрологические тросы, что значительно снижает эффективность проведения работ, увеличивает время проведения станций, снижает достоверность отобранных проб за счет небольшой точности отбора по глубине и, в конечном счете, приводит к существенным экономическим потерям. Кроме того, необходимость работы устройств для автоматического отбора воды с использованием кабеля накладывает ограничения на продольные глубины, на которых может производиться отбор проб. Целью изобретения является расширение эксплуатационных возможностей, сокращение времени зондирования и увеличение глубины зондирования. Указанная цель достигается тем, что в устройстве для автоматического отбора проб воды на заданных глубинах, содержащем надводный блок управления, состоящий из последовательно соединенных блока исходных данных, блока выбора зоны, блока формирования управляющих сигналов и элемента связи, выход которого подключен к первому входу блока цифровой индикации глубины погружения, связанного выходом с блоком выбора зоны, погружаемьш герметичный контейнер с датчиком давления, элементом связи, к входу которого подключен датчик давления, и блоком приема управлянлдих сигналов соединенным первым входом с первым выходом эле лента связи, и пробоотборники, механизмы закрывания крышек которых подключены к соответствующим выходам блока приема управляющих сигналов, надводный блок управления снабжен формирователем кодов программы, соединенным выходом с элементом связи, а входом - с соответствующим выходом блока цифровой индикации глубины погружения, второй .вход которого связан с выходом блока исходных данных, а погружаемый герметичный контейнер дополнительно содержит соединенные последовательно приемник кодов программы, блок памяти программы и блок программного формирования управляющих сигналов, первый выход которого подключен к второ му входу блока приема управляющих сигналов, а второй выход - к входу блока памяти программы, при этом вхо приемника кодов программы связан с вторым выходом элемента связи, а дат чик давления дополнительно соединен с соответствующим входом блока программного формирования управляющих сигналов. На чертеже представлена блок-схем устройства для автоматического отбора проб воды на заданных глубинах. Устройство состоит из надводного блока 1 управления с блоком 2 цифровой индикации глубины погружения, блоком 3 формирования управляющих сигналов, блоком 4 исходных данных, блоком 5 выбора зоны, формирователем 6 кодов программы и элементом 7 связи, погружаемого герметичного контейнера 8 с датчиком 9 давления, элементом 10 связи, блоком 11 приема управлянщих сигналов, приемником 12 кодов программы, блоком 13 памяти программы, блоком 14 программного формирования управляющих сигналов, пробоотборников 15, механизмов 16 закрывания их крышек, и линии 17 свя зи, .соединяющей элементы 7 и 10 свя зи надводного блока 1 управления и погружаемого герметичного контейнера 8. В качестве блока 4 исходных данных использована клавиатура, позволяющая оператору набрать-программу зондирования (глубины, на которых должны сработать пробоотборники, а 1 574 также ширину зон для выработки сигналов управления), с устройствами согласования для ввода программы в блок 2 цифровой индикации глубины погружения и блок 5 выбора зоны. В блоке 4 исходных данных могут быть также использованы переключатели любого типа. Блок 5 выбора зоны представляет цифровую схему сравнения любого типа. Формирова- , гель 6 кодов программы выполнен в виде набора регистров и согласующих устройств, позволяющих сформировать кадр информации с кодами глубин срабатывания всех пробоотборников, а также ширины зон срабатывания и передать их через элементы 7 и 10 связи и линию 17 связи на приемник 12 кодов программы погружаемого герметичного контейнеВ качестве блока 13 памяти программы использовано оперативное запоминающее устройство, вьтолненное на микросхемах серии 564 РУ2 и 564 ИР 12, объем которого позволяет производить запись, хранение и считьюание числа кодов программы, равного числу имеющихся в устройстве пробоотборников 15. В блоке 13 памяти программы может быть использовано оперативное запоминающее устройство любого другого типа, например в твер дотельном исполнении. Приемник 12 кодов программы вы- полнен в виде набора регистров и согласующих устройств, позволяющих принять из надводного блока 1 управления коды программы, и в виде, удоб ном для записи, подать их в блок 13 памяти программы. В качестве блока 14 программного формирования управляющих сигналов использована цифровая схема сравнения, на первые входы которой подается код глубины из блока 13 памяти программы, на второй вход - код глубины от датчика 9 давления. Блок 2 цифровой индикации глубины выполнен в виде вычислителя глубины погружения по принятым кодам глубины, имеющего память и цифровой индикатор глубины. В качестве блока цифровой индикации глубины погружения могут быть использованы функциональный преобразователь с жесткими логическими связями или микропроцессор, имеющие цифровую индикацию любого типа. Устройство работает следующим образом. Автономный реж1Ш работы (с исполь зованием гидрологического троса без связи контейнера 8 с надводным 1 блоком управления)состоит из двух ци лов: подготовки и, собственно, зонди рования. При подготовке надводный блок 1 управления и герметичный контейнер 8 соединены друг с другом ли- нией 17 связи, в.качестве которой используется технологический кабель. Программа зовдирования набирается с помощью блока 4 исходных данных, который связан через блок 2 цифровой индикации глубины погружения с форми ровател м 6 кодов программы. В после нем формируются в необходимом виде коды программ, т.е. коды гидростатического давления, при котором должны сработать пробоотборники 15 при зондировании, а также коды ширины до срабатывания. Количество кодов зависит от количества пробоотборников 15 установленных на погружаемом герме тичном контейнере 8. Коды про1 раммы через злементы 7 и 10 связи поступают на приемник 12 кодов программы, где преобразуются к виду, удобному для записи, и записываются далее в блоке 13 памяти программы. На этом цикл подготовки устройства к автономному зондированию заканчивается. Перед зондированием линия 17 связи, соединяющая элементы 7 и 10 свя- зи надводного блока 1 управления и погружаемого герметичного контейнера 8, убирается. Погружаемый герме тичный контейнер 8 механически закрепляется на гидрологическом тросе. и с помощью лрбедки начинается его погружение. Код информации с датчика 9 давления поступает на вход блока14 программного формирования управляющего сигнала, куда из блока 13 памяти программы уже введен код глубины (гидростатического давления), на которой должно произойти закрытие перв го пробоотборника. В блоке 14 программного формирова ния управляющих сигналов происходит сравнение поступандцего с датчика 9 давления кода глубины (гидростатичес кого давления) с кодом глубины закры тия первого пробоотборника-, заданным в программе. По результатам сравнения блок 14 программного формировани управляющих сигналов выдает сигнал на блок 11 приема управляющих сигналов, который, в свою очередь, вьдает исполнительный сигнал на механизм 16 закрывания крышек, в результате чего обеспечивается срабатывание (закрьюание крышек) первого пробоотборника 15. Одновременно блок 14 программного формирования управляющих сигналов подает сигнал на блок 13 памяти программы, по которому из последнего вводится в блок 14 щ)ограммного формирования з равлякшщх сигналов код очередной глубины. Датчик 9 давления продолжает вьщавать информацию о глубине на блок 14 программного формирования управляющих сигналов и при перемещении контейнера 8 на следующую заданную глубину срабатывает следующий пробоотборник 15. Погружение контейнера 8 продолжается до достижения наибольшей глубины, на которой должен сработать последний пробоотборник. Подготовка к режиму работы по кабельной линии связи заключается в наборе программы зондирования с помощью блока 4 исходных данных. При погружении герметичного контейнера 8 код информации, поступаютций с датчика 9 давления через элементы 10 и связи, преобразуется в блоке 2 цифровой индикации глубины погружения в глубину погружения и подается на блок 5 выбора зоны, где принятый код сравнивается с заданными исходными глубинами срабатывания пробоотборников с учетом ширины зоны для выработки сигналов управления, информация о которых поступает с блока 4 исходник данных. Ширина зоны срабатывания пробоотборников выбирается с учетом скорости зондирования и частоты опроса датчика давления. По результатам сравненияблок 3 выбора зоны вьщает единичный разрешающий сигнал на блок 3 формирования управлякнцих сигналов, при этом одновременно запрещается появление повторных разрешанлцих сигналов до тех пор, пока герметичньй контейнер 9 не переместится на глубину, соответствующую следующей зоне дешифрации. С 3 формирования управляющий сигнал через элементы 7 и 10 связи , поступает на блок 11 приема управляющих сигналов герметичного контейнера 8 и через механизм 16 закрывания крышек обеспечивает срабатывание первого пробоотборника 14.
Датчик давления 9 продолжает выдавать информацию о глубине на блок 2 цифровой индикации глубины погружения и далее на блок 3 выбора зоны и при перемещении контейнера 8. в еледующую зону срабатывает следующий пробоотборник 15.
Устройство для автоматического отбора проб воды может работать по кабельной линии связи и в режиме ручного управления. При этом пробоотборники 15 закрываются на различных глубинах по команде, подаваемой оператором. Глубина погружения герме-г тичного контейнера 8 определяется оператором по блоку 2 цифровой индикации глубины погружения.
В результате введения перечисленных блоков с предлагаемыми взаимосвязями) обеспечивается возможность подготовки устройства к зондированию по любой изменяемой программе и проведения зондирования с использованием как электрического кабель-троса, так и гидрологического троса, что, в свою .очередь, позволяет увеличить глубину
зондирования и сократить время, затрачиваемое на его проведение. Увеличение глубины зондирования до 6(ЮО м (по известному 2000 и) обеспечивается в автономном режиме работы за счет большей физической длины гидрологического троса, а одинаковой длине с кабель-тросом - за счет меньшего горизонтального сноса троса с аппаратурой (при меньшем диаметре троса - меньше дрейфовое сопротивление) . При этом достигается сокращение времени зондирования на 10-20 % в зависимости от скорости дрейфа судна.
Автоматизация процесса отбора проб воды для гидрофизических, Гидрохимических и гидробиологических исследований на всех типах научно-исследовательских судов позволяет поднять эффективность исследовательских судов позволяет поднять эффективность исследовательских работ.
Годовой экономический эффект от внедрения изобретения ориентировочно составляет 18 тыс. руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического отбора проб воды на заданных глубинах | 1984 |
|
SU1249380A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1142753A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| Устройство для автоматического отбора проб воды | 1977 |
|
SU726469A1 |
| Устройство для автоматического отборапроб воды | 1974 |
|
SU509816A1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 2002 |
|
RU2214588C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| Устройство для автоматического отбора проб жидкости | 1981 |
|
SU1003030A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1978 |
|
SU731347A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ ВОДЫ НА ЗАДАННЫХ ГЛУБИНАХ, содержащее надводный блок управления, состоящий из последовательно соединенных блока исходных данных, блока выбора зоны, блока формирования управляющих сигналов и элемента связи, выход которого под ключен к первому входу блока цифровой индикации глубины погружения, связанного выходом с блоком выбора зоны, погружаемый герметичный контейнер с.датчиком давления, элементом связи, к входу которого подключен датчик давления, и блоком приема управляющих сигналов, соединенным первым входом БМйД+ iHfcivfeI с первым выходом элемента связи, и пробоотборники, механизмы закрывания крышек которых подключены к соответствующим выходам блока приема управляющих сигналов, отличающееся тем, что, с целью расширения эксплуатационных возможностей, сокращения времени зондирования и уве. личения глубины зондирования, надводный блок управления снабжен формирователем кодов программы, соединенным выходом с элементом связи, а входом - с соответствующим выходом блока цифровой индикации глубины погружения, второй вход которого связан § с выходом блока исходных данных, а погружаемый герметичный контейнер дополнительно содержит соединенные последовательно приемник кодов прот граммы, блок памяти программы и блок программного формирования управляющих сигналов, первый выход которого подключен к второму входу блока приема управляющих сигналов, а второй выход - к входу блока памяти програм э мы, при этом вход приемника кодов IS5 У1 программы связан с вторьм выходом элемента связи, а датчик давления дополнительно соединен с соответствующим входом блока программного формирования управляющих сигналов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического отборапроб воды | 1974 |
|
SU509816A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
