:юбретеиие относится к устройствам Л, автоматического отбора проб воды на чада111 ых глубинах в iipotiecce ргспрерыв- пого зоп;1ироиа 1ии и может быть применено при гидрофизических, гидрохимических и гидробиологических исследованиях змутреиних водоемов, морей и океанов.
Цель изобретения - иовышенме достоверности отбора проб воды путем обеспечеиия возможности функционалыюго контроля устройства перед зондирванием и сокрапюние временя па подготовку устройства к зондированию.
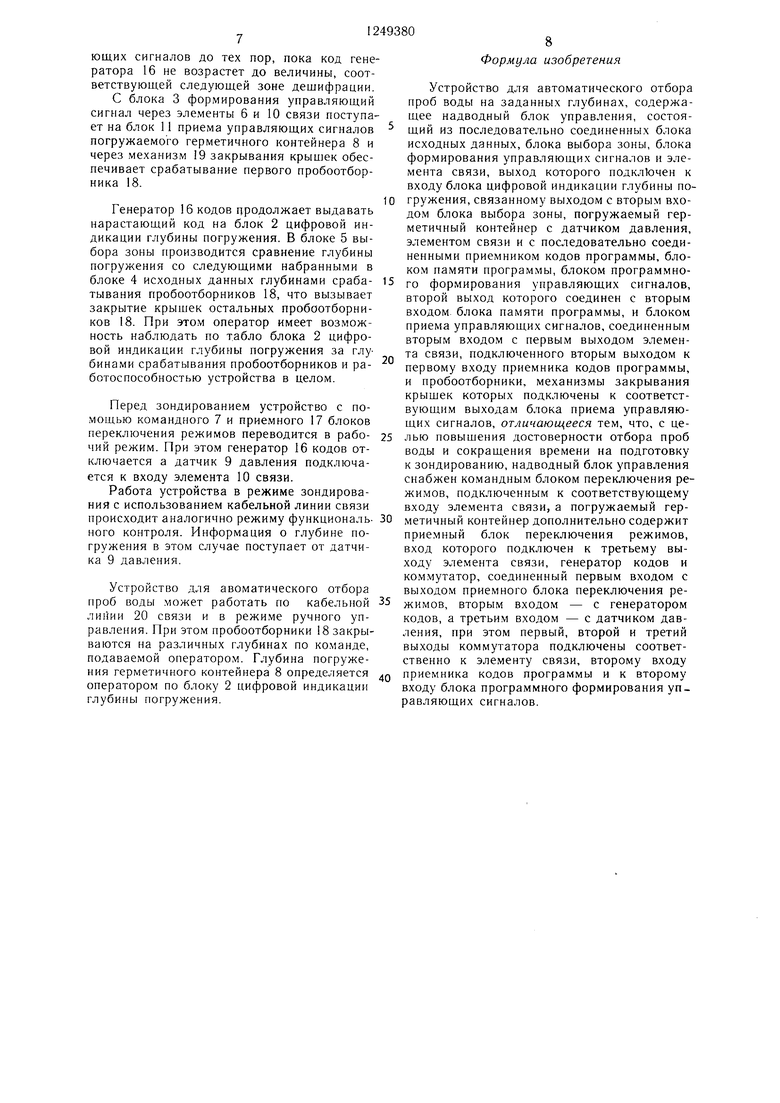
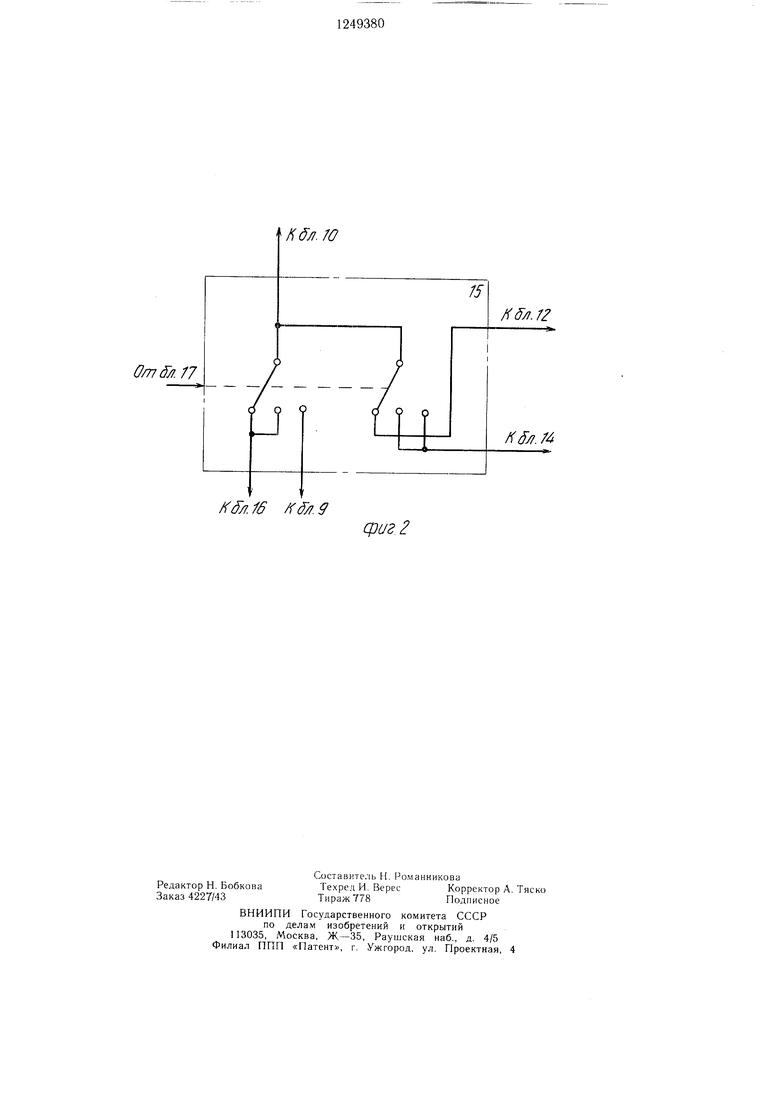
На фиг. 1 представлена блок-схема устройства для автоматического отбора проб воды на заданных глубинах; нг фиг. 2 -- схема коммутатора, выполненного на три положения.
Устройство состоит из падводдюго блока 1 унравления, включающего блок 2 цифровой индикации глубины погружения, блок 3 формирования управляющих сигналов, блок 4 исходных данных, блок 5 выбора зоны, элемент 6 связи и команднЕЛЙ блок 7 переключения режимов, погружаемого герметичного корггейнера 8, в состав которого входят датчик 9 давления, элемент 10 связи, блок 11 приема управляюн1их сигна- лов, приемник 12 кодов программы, блок 13 памяти программы, блок 14 riporjiaMMnoro (fзopмиpoвaния управляющих сиг налов, коммутатор 15, генератор 16 кодов и прием- пый блок 17 переключения режимов. Пробоотборники 18 с .механизмами 19 закры- вания их крышек подключены к блоку прие.ма унравляюцдих сигналов, эл( б связи надводного блока yпpaвлeни я и эле.мент 10 связи погружаемого герметичного контейнера 8 соединены линией 20 связи.
Блок 2 цифровой индикации глубины но- гружения выполнен в виде вычислителя глубины погружения по принятым из погружаемого г ерметичного контейнера кодам давления, имеющего память и н.ифровой индикатор глубины. Расчет глубины в этом блоке производится по известным соотношениям. В качестве блока 2 цифрвой индикации глубины погружения может быть использован функциональный преобразователь. Блок 3 формирования управляющих сигналов нред- ставляет из себя формирователь командного сигнала на закрытие пробоотборника. В блоке производится преобразование единично1-о еигнала, вырабатываемого блоком 5 выбора зо)Ы, в сигнал, необходимый д;1я подачи на элемент 6 связи.
В качестве блока 4 исходных данных ис- нользована клавиатура, позволяюп|,ая оператору набрать программу зондирования (глубины, на которых должны сработать пробоотборники, а также ширину зон для выработки сигналов унравления), с элементами памяти и устройством согласования для ввода программы в блок 5 выбора зоны. Е блоке исходных данных могут быть ис
0
5
Q
5
5 0
5 s
0 5
0
пользованы переключатели и элементы памяти любого типа.
Б.лок 5 выбора зоны представляет собой цифровоую схему сравнения любого типа.
Элемент 6 связи может быть выполнен по-разному, в зависимости от выбранного метода передачи командных (о переключении режи.мов) и информационных (о глу- 6s-nie погружения сигналов но линии связи. При .м методе передачи он содержит передатчик, нриемнпк, усилите;1и-формиро- вател и.
В частности, при частотно-временном методе передачи и разделениии сигналов элемент связи содержит генератор, модулятор, усилитель мопцюсти (выходной каскад), избирательные усилители (приемники), усилители -форм и рор,ате.л и выходного сигнала.
Таким же образо.м выполнен элемент 10 связи в погружаемо.м герметичном контейнере. Третий выход этого блока подключе} к цепям, выделяюн:.им сигналы переключения режимов, поступающим из надводного б.чока управления.
Командный блок 7 переключения режи.мов содержит органы управления режима- .ми, например кнопки, и п ифратор ко.манд- iibix сигналов ,ча переключение режи.мов. Шифратор может быть использован .любог о тика.
Блок 1 1 приема управляющих сиг на.юв содержит входную схе.му объединения (но нерво.му и второму входам), распределитель импульсов, вьто.лнепный на регистре сдвига, и управляемые ключи д;1я ком.му- тации электромагнитов механиз.мов 19 закрывания крышек пробоотборников 18.
В качестве блока 13 памяти программы иснользовано оперативное запоминаюн1ее устройство, выполненное на микросхе.мах, об ьем которого позволяет производить запись, хранение и считывание числа кодов програ.м- мы, равного числу имеюн1ихся в устройстве пробоотборников. В блоке 13 памяти программы может быть использовано оперативное зано.минаюшее устройство любого другого типа.
В качестве блока 14 программного фор- .мирования управляющих сигналов использована цифровая схема срав} ения, на пер- sihie входы которой подается код глубинь из блока 13 памяти программы, на второй нхол, - код глубины от датчика 9 давления (и,1И генератора 16 кодов).
Приемник 12 кодов программы выполнен в Биде набо|)а регистров и согласующих устройств, ПОЗВОЛЯЮ1ЦИХ и оинять коды прог- 1)аммы, и в виде, удобном для записи, подать их в блок 13 памяти программы.
Коммутатор 15 может быть выполнен на .любых элементах: э.;1ектр01шых (бесконтактных) ключах, реле и т.п. О.ч реализует функцию переключения двух входных сигна;юв (от датчика 9 дав.ления и генератора 16
кодов) на три выхода (на вход элемента 10 связи, на второй вход приемника 12 кодов программы и на второй вход блока 14 программного формирования управляющих сигналов) по командам, поступающим с приемного блока 17 переключения режимов. Ком- мутатор 15 имеет три положения и обеспечивает переключение для трех режимов работы: подготовки к автономной работе (записи программы), функционального контроля и собственно, рабочего режима.
Коммутатор производит и вспомогательные переключения: нодачу питания на генератор 16 кодов и датчик 9 давления (фиг.2).
Генератор 16 кодов состоит из задаюп1,его генератора и реверсивного счетчика. Выходной сигнал генератора 16 кодов (последо- вательный двоичный код) соответствует вы- ход1юму сигналу датчика 9 давления.
Приемный блок 17 переключения режимов представляет собой дешифратор командных сигналов на переключение режима, выходн1 1е сигналы которого управляют эле- Meirra.MH кол лп татора 15.
В качестве линии 20 связи в кабельном варианте используется электрический бронированный кабель-трос, при подготовке к ав- тоновному варианту работы и в режиме функ циопального контроля на борту судна - техноло ичеекий кабель.
Устройство работает следующим образом.
Автономный режим работы (с использованием гидрологического троса без связи контейнера 8 с надводным блоком 1 упр.ав- ления) состоит из двух циклов: подготовки (записи программы) и, собственно, зондирования. При подготовке надводный блок 1 управления и герметичный контейнер 8 соединены линией 20 связи, в качестве которой используется технологический кабель. Прог- рамма зондирования (глубины, на которых должны сработать пробоотборники с учетом ширины 30ii) набирается с помощью блока 4 исходных данных. Оператор с помощью органов управления (например, кнопок) на командном блоке 7 переключения режимов не- реводит устройство в режим подготовки к ав- толомной работе. Команда перевода в режим подготовки к работе (записи программ) с командного блока 7 переключения режимов через элементы 6 и 10 связи поступает на приемный блок 17 переключения режимов, который переводит коммутатор 15 в положение, соответствуюн1ее этому режиму (первое положение ). При этом датчик 9 отключается, генератор 16 кодов подключается к входу элемента 10 связи и второму входу приемника 12 кодов программы.
Генератор 16 кодов начинает вырабатывать нарастаю дий во времени код, который поступает на второй вход приемника 12 кодов программы, и, одновременно, через элементы 10 и 6 связи - на вход блока 2 цифро5д
15
5
о 5 0
5
вой индикации глубины погружения надводного блока 1 управления.
Блок 2 цифровой индикации глубины погружения но известным соотношениям производит расчет давления и глубины погружения, соответствующих принимаемым кодам от генератора 16 кодов. При достижении кода величины, при которой глубина на выходе блока 2 цифровой индикации глубины погружения сравняется с первой из глубин, набранной в программе зондирования с помощью блока 4 исходных данных, блок 5 выбора зоны выдает единичный разрешающий сигнал на блок 3 формирования управляющих сигналов. Сигнал с выхода этого блока через элементы 6 и 10 связи в качестве разрещающего сигнала поступает на первый вход приемника 12 кодов программы. По этому сигналу присутствующий в этот момент на втором входе этого блока код с генератора 16 кодов записывается в блок 13 памяти программы. Таким образом, в блоке 13 памя- Tii программы производится запись кода, соответствующего предусмотренной в программе глубине закрывания первого пробоотборника. Далее процесс записи кодов д,дя других пробоотборников в соответствии с программой продолжается по мере нарастания во времени кодов на выходе генератора 16 кодов. Поскольку коды на выходе генератора 16 кодов изменяются в том же диапазоне, что и коды давления на выходе .аатчика 9 давления, а расчет глубин по этом кодам прооизводится по известным соот- нонлениям с использованием статических характеристик преобразования для используе- .мого датчика 9 давления, в блоке 13 памяти программы к моменту времени окончания нарастания кодов генератора 16 кодов оказывается записанной вся программа зондирования.
После записи программы оператор имеет воз.можность произвести проверку записанной программы и функциональный контроль блоков погружаемого герметичного контейнера 8. Для этого взводятся механизмы 19 закрывания крышек пробоотборников 18, с помощью органов управления на командном блоке 7 переключения режимов устройство переводится в режим функционального контроля. Команда о переходе на этот режим передается с командного блока 7 переключения режимов через элементы 6, 20 и 10 связи на приемный блок 17 переключения режимов, который переводит ком.мутатор 15 в необходимый режим (второе положение). При этом генератор 16 кодов соединяется с элементом 10 связи и вторым входом блока 14 программного формирования управляющих сигналов. Генератор 16 кодов начинает вырабатывать нарастающий во времени код, который поступает через элементы 10 и 6 связи на блок 2 цифровой индикации глубины погружения и, одновременно, на второй б;1ока 14 программного формирования управляющих сигналов, в котором происходит сравнение кода, ноступающего с генератора 16 кодов, с кодом глубины закрывания первого пробоотборника 18, заданным в п)ограмме. По результа- там сравнения блок 14 программного формирования управляклцих сигналов выдает сигнал на блок 11 приема управляющих сигналов, который выдает исполнительный сигнал на механизм 19 закры15апия кры- HjeK, в результате чего обеспечивается срабатывание (закрывание крышек) первого пробоотборника 18. Одновременно блок 14 программного формирования управляющих сигналов подает сигнал на блок 13 памяти программы, по которому из б.лока 13 па- мяти вводится в блок 14 программного формирования управляюни1Х сигналов код очередной глубины. Генератор 16 кодов продолжает выдавать нарастающий во времени код на блок 14 программного формирования управляющих сигпалоз, в результате чего в соответствии с программой, записанной в блоке 13 памяти программы, производится закрытие всех пробоотборников. Одиовременпо код от генератора 16 через элементы 10 и 6 связи поступает иа блок 2 цифровой индикации глубины rio- гружения, где по поступающим кодам производится расчет глубины, i-i опе)ато| имеет возможность проверки программы зондирования, наблюдая за срабатыванием пробоот- бор|щков и глубиной иа цисЬроном таблс блока 2 цифровой индикации г лубины )y- жения.
Таким образом реализуется возможносгь функционального контроля устройства на борту судна перед зондирование: ,, что новпг- щает достоверность отбора проб при зон- дирвании.
В случае, если оператор при функциональном контроле обнаружит OTKJioneinie от заданной программы, он имеет возможность произвести перезапись программы и принять меры к правильной ее реализации. На этом цикл подготовки устройств к автономному зондированию заканчивается.
Перед зондированием устройство с помощью командного 7 и приемного 17 блоков переключения режимов переводится в рабочий режим (третье положение коммутатора). При этом генератор 6 кодов отключается, а датчик 9 давления через коммутатор 15 подключается к второму входу блока 14 программного формирования ун- равляющих сигналов и входу элемента 10 связи. Линия 20 связи, соединяющая элементы 6 и 10 связи надводного блока 1 управления и погружаемого герметичного контейнера 8, убирается. Погружаемый герметич- ный контейнер 8 со взведенными механизмами 19 закрывания крышек пробоотборников 18 механически закрепляется на гидрологическом тросе и с помон ью лебедки начинается его погружение.
Код информации с датчика 9 давления начинает поступать на второй вход блока 4 програг 1много формирования управляющего сигнала, куда из блока 13 памяти програ.ммы уже введен код давления, со- ответствую1ций глубине, на которой должно произойти закрытие первого нробоотборни- ка 18.
В блоке 14 програм.много формирования управляющих сигналов происходит сравнение поступающего с датчика 9 давления ко- ;i,a даво1ения с кодо.м, соответствуюншм глубине закрытия первого пробоотборника 18, записанны.м в програ.мме. По результата.м срав1;ения блок 14 программного формирова- управ.ляющ,их сигна.лов выдает сигнал на б.лок 1 1 приема уп;)ав;|яющих сигналов, который выдает ис1тол11ительный сигнал на .механизм 19 закрывания крьииек первого н)о- боогборника 18. После срабатывания послед- liero и б;1ок 14 п рогра.ммно. Ч) формирования угтравляющих CHi-i a;iOB вводится из блока 13 камяти программы код дав.ления, соответствующий очередной глубине отбора пробы. Датчик 9 давления Г)одолжает выдавать ин- фо 1мацию о давлении на б. юк 14 програм- многп фор.мирования управляющих сигналов и при перемещении ногружаемогч) герметич- }|-:): о контейнера 8 на следуюихую заданную глубину срабатывает следуюиилй нробоот- бог)ник 18. Пог ружение контейнера 8 про- долж.ается до достижения наибольшей глубины, на которой долже); сработать последний 1)обоотборник 18.
Подготовка к режи:му работы ко кабе.ль- ной линии связи заключается в наборе программы зондирования с номон ью блока 4 исходных данных. Перед зондированием оператор также имеет воз. ироведен1;я функционального контроля устройства па 6oi.v-y судна. Для. этого взводятся мы 19 закрывания крьипек пробоотборников 18. С помоп1ью командно о 7 и приемного 17 блоков переключения режимов устройство переводится в режим функционального контроля. При этом гене)атор 16 кодов через к;;)ммутато) 15 подключается к входу элемента 10 связи. 1-{араста:ОН.1ий во вре.мени код от 1 енерато})а 16 через элемент1 1 10 и 6 связи HOCTyiiaeT иа вход блока 2 цифровой индикации глубины погружения, где игд-образуется в глубину и il(Jдaeтcя на первый вход блока 5 выбора зоны. В этом блоке ||)ииятый код сравнивается с заданными исходными глубииа.ми сраба 1 ьп5ания пробоотборников с учетом ширины зо.ны д,:;я выработки сигна.юв т1равления, информации о котч)рых поступает с б.лока 4 исходных данщух. По результатам еравне1шя б,лок 5 выбора зоны выдает единичный разреп аю- ИАИЙ сигпал на блок 3 формирования управляющих сиг11а,лов, iij)- эл ом од1и.)врсменно запрещается появление повторных разрсм ;ающих сигналов до тех пор, пока код генератора 16 не возрастет до величины, соответствующей следующей зоне дещифрации. С блока 3 формирования управляющий сигнал через элементы 6 и 10 связи поступает на блок И приема управляющих сигналов погружаемого герметичного контейнера 8 и через механизм 19 закрывания крышек обеспечивает срабатывание первого пробоотборника 18.
10
Формула изобретения
Устройство для автоматического отбора проб воды на заданных глубинах, содержащее надводный блок управления, состоящий из последовательно соединенных блока исходных данных, блока выбора зоны, блока формирования управляющих сигналов и элемента связи, выход которого подклЬчен к входу блока цифровой индикации глубины по гружения, связанному выходом с вторым входом блока выбора зоны, погружаемый герметичный контейнер с датчиком давления, элементом связи и с последовательно соединенными приемником кодов программы, блоком памяти программы, блоком программноГенератор 6 кодов прод,олжает выдавать нарастающий код на блок 2 цифровой индикации глубины погружения. В блоке 5 выбора зоны производится сравнение глубины погружения со следующими набранными в
блоке 4 исходных данных глубинами сраба- 15 ро формирования управляющих сигналов, тывания пробоотборников 18, что вызывает второй выход которого соединен с вторым закрытие крышек остальных пробоотборни- входом блока памяти программы, и блоком
приема управляющих сигналов, соединенным вторым входом с первым выходом элемента связи, подключенного вторым выходом к первому входу приемника кодов программы, и пробоотборники, механизмы закрывания крыщек которых подключены к соответствующим выходам блока приема управляюков 18. При этом оператор имеет возможность наблюдать по табло блока 2 цифровой индикации глубины погружения за глубинами срабатывания пробоотборников и ра- ботоспособностью устройства в целом.
Перед зондированием устройство с по- .мощью командного 7 и приемного 17 блоков
щих сигналов, отличающееся тем, что, с цещих сигналов, отличающееся тем, что, с цепереключения режимов переводится в рабо- 25 лью повышения достоверности отбора проб
чий режим. При этом генератор 16 кодов отключается а датчик 9 давления подключается к входу элемента 10 связи.
Работа устройства в режиме зондирования с использованием кабельной линии связи
воды и сокращения времени на подготовку к зондированию, надводный блок управления снабжен командным блоком переключения режимов, подключенным к соответствующему входу элемента связи, а погружаемый герводы и сокращения времени на подготовку к зондированию, надводный блок управления снабжен командным блоком переключения режимов, подключенным к соответствующему входу элемента связи, а погружаемый герпроисходит аналогично режиму функциональ- 30 метичный контейнер дополнительно содержит ного контроля. Информация о глубине погружения в этом случае поступает от датчика 9 давления.
приемный блок переключения режимов, вход которого подключен к третьему выходу элемента связи, генератор кодов и коммутатор, соединенный первым входом с выходом приемного блока переключения реУстройство для авоматического отбора
приемный блок переключения режимов, вход которого подключен к третьему выходу элемента связи, генератор кодов и коммутатор, соединенный первым входом с выходом приемного блока переключения репроб воды может работать по кабельной 35 жимов, вторым входом - с генератором ли11ии 20 связи и в режиме ручного управления. При этом пробоотборники 18 закрываются на различных глубинах по команде, подаваемой оператором. Глубина погружения герметичного контейнера 8 определяется Q приемника кодов программы и к второму оператором по блоку 2 цифровой индикациивходу блока программного формирования упглубины погружения.
кодов, а третьим входом - с датчиком давления, при этом первый, второй и третий выходы коммутатора подключены соответственно к элементу связи, второму входу
равляющих сигналов.
8
Формула изобретения
Устройство для автоматического отбора проб воды на заданных глубинах, содержащее надводный блок управления, состоящий из последовательно соединенных блока исходных данных, блока выбора зоны, блока формирования управляющих сигналов и элемента связи, выход которого подклЬчен к входу блока цифровой индикации глубины погружения, связанному выходом с вторым входом блока выбора зоны, погружаемый герметичный контейнер с датчиком давления, элементом связи и с последовательно соединенными приемником кодов программы, блоком памяти программы, блоком программноро формирования управляющих сигналов, второй выход которого соединен с вторым входом блока памяти программы, и блоком
щих сигналов, отличающееся тем, что, с це лью повышения достоверности отбора проб
воды и сокращения времени на подготовку к зондированию, надводный блок управления снабжен командным блоком переключения режимов, подключенным к соответствующему входу элемента связи, а погружаемый гер метичный контейнер дополнительно содержит
метичный контейнер дополнительно содержит
приемный блок переключения режимов, вход которого подключен к третьему выходу элемента связи, генератор кодов и коммутатор, соединенный первым входом с выходом приемного блока переключения режимов, вторым входом - с генератором приемника кодов программы и к второму входу блока программного формирования уп жимов, вторым входом - с генератором приемника кодов программы и к второму входу блока программного формирования упкодов, а третьим входом - с датчиком давления, при этом первый, второй и третий выходы коммутатора подключены соответственно к элементу связи, второму входу
равляющих сигналов.
КбЛ. Ю
Отб лЛ
.б /fd/7.ff
Составитель И. Романникова Техред И. ВересКорректор А. Тяско
Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
фиг 2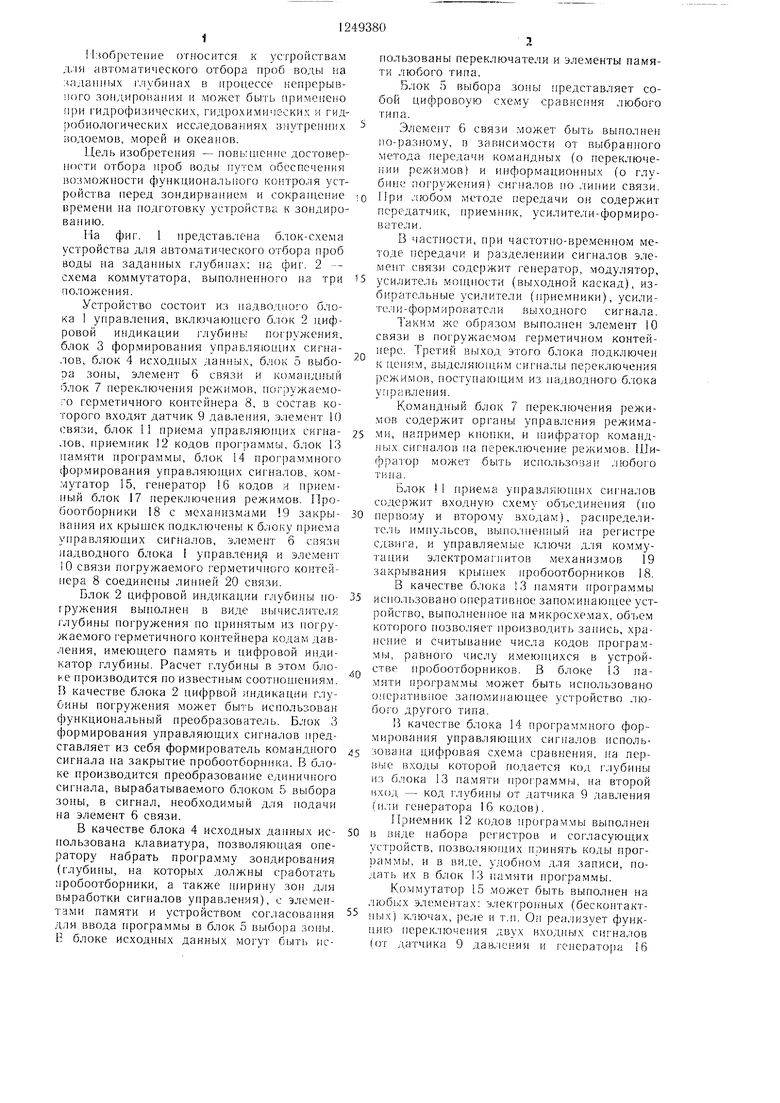
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1142753A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| Устройство для автоматического отбора проб воды | 1977 |
|
SU726469A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1978 |
|
SU731347A1 |
| Устройство для автоматического отборапроб воды | 1974 |
|
SU509816A1 |
| Устройство для автоматического отбора проб жидкости | 1981 |
|
SU1003030A1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| Система измерения интегральной скорости течения | 1989 |
|
SU1673984A1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
Изобретение относится к устройствам для автоматического отбора проб воды на заданных глубинах, .может быть использовано при гидрофизических, гидрохимических и гидробиологических исследованиях водоемов ыорей, океанов и позволяет повысить достоверность отбора проб путем обеспечения возможности функционального контроля устройства перед зондированием и сокращения времени на его подготовку. Устройство содержит надводный блок 1 управления, включающий блок 2 цифровой индикации глубины погружения, блок 3 формирования управляющих сигналов, блок 4 исходных данных, блок 5 выбора зоны, элемент связи (ЭС) 6 и командный блок 7 переключения режимов, погружаемый герметичный контейнер 8, в состав которого входят датчик 9 давления, ЭС 10, блок 11 приема управляющих сигналов, приемник 12 кодов программы, блок 13 памяти программы, блок 14 программного формирования управляющих сигналов, коммутатор 15, генератор 16 кодов и приемный блок 17 переключения режимов. Пробоотборники 18 с механизмами 19 закрывания их крыщек подключены к блоку приема управляющих сигналов, ЭС 6 надводного блока 1 и ЭС 10 соединены линией 20 связи. 2 ил. б (Л tc 4 ;о 00 00
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Парамонов А | |||
| Н., Кушнир В | |||
| М., За- бурдаев В | |||
| Н | |||
| Современные методы и средства измерения гидрологических параметров океана | |||
| - Киев: Наукова думка, 1979 | |||
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
