4 ND
сл
iCo
Изобретение относится к средствам автоматического отбора проб воды на заданных глубинах и может быть использовано при гидрофизических, гидрхимических исследованиях внутренних водоемов, морей и океанов путем непрерывного зондирования при изучении вертикальных разрезов.
По основному авт. св. № 607125 известно устройство для автоматического отбора проб воды на заданных глубинах, содержащее надводный блок управления, состоящий из блока формирования управляющих сигналов, блока цифровой индикации, элемента связи и блока контроля срабатывания крьшек пробоотборников, погружаемьй герметичный контейнер, включающий датчик глубины, блок приема управляющих сигналов, пробоотборники и мехаиизмы закрывания их крьшек, причем каждьй из пробоотборников снабжен датчиком, закрывания крышек пробоотборника, выход которого через элементы связи соединен со входом блока цифровой индикации и первьм входом блока контроля срабатьгоания крьшек пробоотборников, второй вход которого связан с выходом блока формирования управляющих сигналов, вход которого соединен с выходом блока контро1ля срабатывания крьшек пробоотборника fll .
., .
Однако сложность известного устройства не обеспечивает необходимой надежности работы устройства из-за того, что каждый из пробоотборников снабжен датчиком закрывания крьшек пробоотборника, электрическая связь которого с блоками, размещенными внутри прочного герметичного контейнера, осуществляется через гермовводы, являющиеся потенциально ненадежными узлйми для глубоководной аппаратуры. Количество таких гермовводов должно быть равно количеству пробоотборников и при большом их числе снижается надежность устройства. Применение большого числа датчиков закрьшания крышек приводит также к увеличению габаритов устройства.
Цель изобретения - упрощение конструкции с одновременным уменьшением габаритов и повьшением надежности устройства,
Указанная цель достигается тем, что в устройстве для автоматического отбора проб воды на заданных глубинах датчик закрывания крьшек пробоотборников выполнен в виде импульсного трансформатора, порогового элемента и одновибратора, подключенного выходом к входу элемента связи погружаемого герметичного контейнера, при этом первичная обмотка импульсного трансформатора соединена с механизмами закрывания лсрышек всех пробоотборников, а вторичная обмотка им.пульсного трансформатора соединена через пороговьй элемент с входом одновибратора.
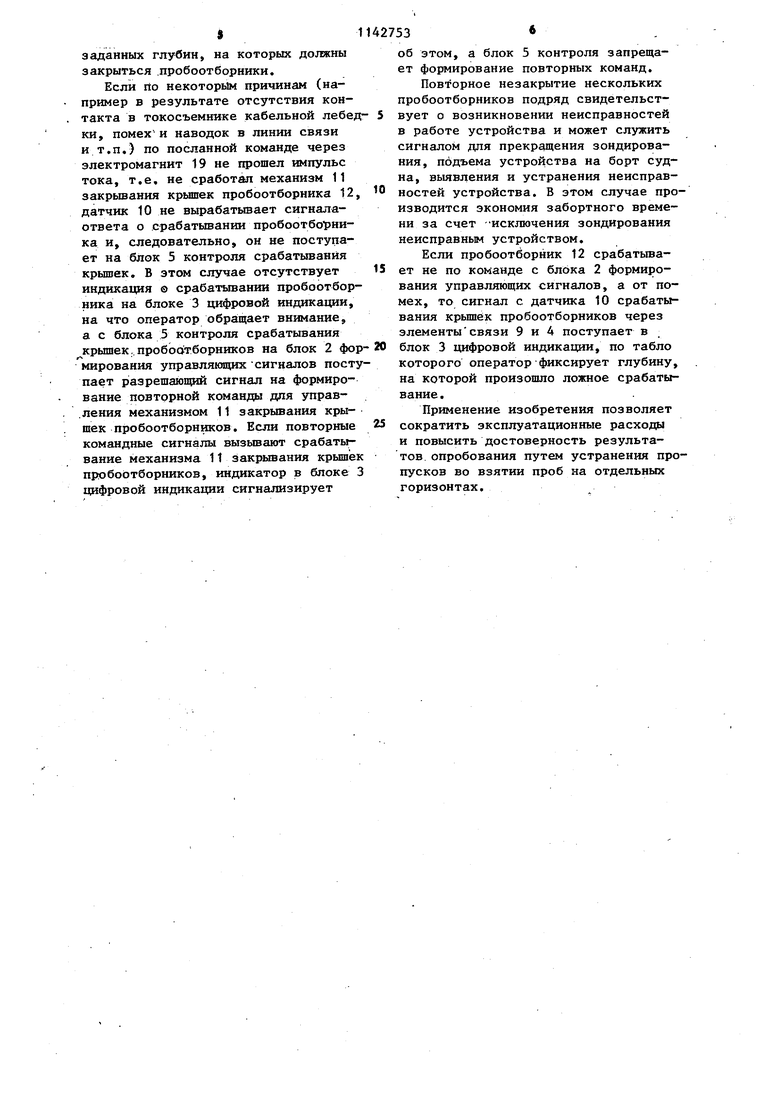
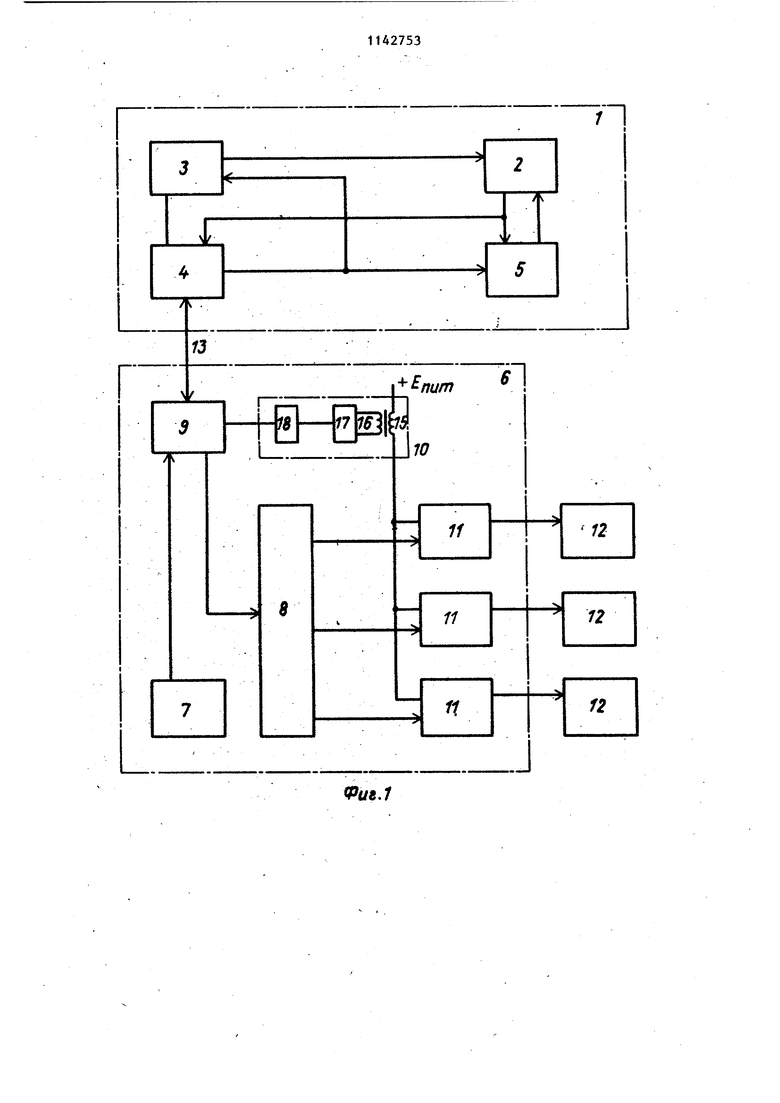
На фиг. 1 представлено устройство для автоматического отбора проб воды на заданных глубинах, блок-схема; на фиг. 2 - структурная схема подключения датчика закрьгеания крышек пробоотборников.
Устройство состоит из надводного блока 1 управления с блоком 2 формирования управляющих сигналов, блоком 3 цифровой индикации, элементом связи 4, блоком 5 контроля срабатьгоания крьшек пробоотборников, погружаемого герметичного контейнера 6 с датчиком 7 глубины, блоком 8 приема управляющих сигналов, элементом связи 9, датчиком 10 закрывания крьшек пробоотборников, механизмами 11 закрывания крьшек пробоотборников 12 и линии связи 13.
Датчик 10 закрывания крьшек пробоотборников состоит из импульсного трансформатора 14, первичная обмотка 15 которого включена в общую цепь питания всех электромагнитов механизмов 11 закрывания крьшек, а вторичная обмотка 16 подключена на вход порогового элемента 17, выход кото;рого соединен со входом одновибратоipa 18. Выхо датчика 10 (выход одно- вибратора 18) соединен со входом элемента связи 9 погружаемого герметичного контейнера 6.
Механизм 11 закрьшания крьшек пробоотборников состоит из электромагнита 19, расположенного внутри погружаемого герметичного контейнера 6 и разгруженного от воздействия давления и влияния окружающей контейнер среды (воды). Якорь электромагнита 19связан системой тяг с крышками пробоотборника 12 и расположен вне погружаемого герметичного контейнера 6. Электромагнит 19 установлен на корпусе погружаемого герметичного контейнера 6 с использованием уплотняющей (герметизирзтощей) прокладки. В цепь электромагнитов 19 для управления их работой включены управля емые ключи 20, например тиристоры, на управляющие входы которьрс подаются командные сигналы с блока приема управляющих сигналов 8. Блок цифровой индикации 3 вьтолнен в виде вычислителя глубины погру жения по принятым кодам глубины, имеющего память, цифровую схему сравнения, цифровой индикатор глубины и индикатор срабатывания пробоотборников. В качестве блока цифровой индикации глубины погружения могут быть использованы функциональный пре образователь с жесткими логическими связями или микропроцессор, имеющие цифровой индикатор глубины любого типа. В качестве индикатора срабатывания пробоотборников применяется светодиод со схемой его включения, а может быть применена лампа накаливания, газоразрядная лампа или цифрово индикатор, показывающий номер сработавшего пробоотборника. Блок 2 формирования управляницих сигналов представляет собой формирователь имцуль сов определенной длительности и амплитуды, например одно вибратор, с устройством согласования и схемой разрешения вьщачи повторного сигнала. Блок 5 контроля срабатьшания крышек пробоотборников представляет собой устройство памяти, например триг гер с элементами задержки и формирователем разрешающего сигнала. Элементы связи 4 и 9 могут быть любого типа в зависимости от выбранной системы связи и метода разделения сигналов от датчика давления, управляющих сигналов и сигналов ответа. Они могут включать генераторы с разнесенными частотами, модуляторы, резонансные усилители с соответствующими формирователями. Блок 8 приема уп1)авляющих сигналов представляет собой распредели|тель с соответствующими согласующим устройствами. Устройство работает следующим образом. Перед зондированием для отбора проб воды крышки пробоотборников 12 открываются (взводятся механизмы 11 закрывания крьицек). Погружаемый герметичный контейнер 6 опускается под воду с помощью одножильного бронированного кабель-троса, которьй используется одновременно в качестве информационной и силовой линии ссвязи 13. Информация с датчика 7 глубины (давления) через элементы связи 9, 4 и линию связи 13 поступает на вход блока 3 цифровой индикации, где преобразуется в значение глубины и высвечивается на цифровом табло. При достижении контейнером 6 первой заданной глубины из блока 3 цифровой индикации на блок 2 формирования управляющих сигналов поступает единичный разрешающий сигнал. В блоке 2 формирования управляющих сигналов формируется команда, которая поступает в блок 5 контроля срабатывания крьш1ек пробоотборников для запоминания и через элементы связи 4 и 9 - в блок 8 приема управляющих сигналов герметичного контейнера 6. С выхода блока 8 приема управляющих сигналов на управляющий вход соответствующего управляемого ключа 20 поступает открывающий ключ импульс . Импульс тока в обмотке электромагнита 19 создает магнитное поле, втягивающее якорь в отверстие сердечника электромагнита 19. Поступательное движение якоря через систему тяг закрьшает крьш1ки пробоотборника 12. При прохождении через электромагнит 19 механизма 11 закрьгоания крышек, а следовательно, и через первичную обмотку 15 импульсного трансформатора 14, импульса тока, во вторичной обмотке 16 возникает импульс напряжения, который подается на вход порогового элемента 17, где.сравнивается с заданным уровнем и при его превьш1ении на выходе порогового элемента 17 формируется импульс, по переднему фронту которого одновибратор 18 формирует импульс определенной длительности, поступающий на эле,мент связи 9, Далее сигнал через линию связи.13 и элемент связи 4 поступает на вход блока цифровой индикации 3 и блок 5 контроля срабатывания крышек пробоотборников и подтверждает срабатывание пробоотборника 12 по команде, ранее выданной с блока формирования управляющих сигналов 2. Дальнейшая работа устройства автоматического отбора проб воды повторяется при достижении следующих I заданных глубин, на которых долкны закрыться .пробоотборники. Если По некоторым причинам (например в результате отсутствия контакта в токосъемнике кабельной лебе ки, помехи наводок в линии связи и т.п.) по посланной команде через электромагнит 19 не прошел импульс тока, т.е. не сработал механизм 11 закрывания крышек пробоотборника 12 датчик 10 не вырабатывает сигналаответа о срабатывании пробоотботрника и, следовательно, он не поступа ет на блок 5 контроля срабатывания крышек. В этом случае отсутствует индикация © срабатьшании пробоотбор ника на блоке 3 цифровой индикации, на что оператор обращает внимание, а с блока 5 контроля срабатывания крышек, пробоотборников на блок 2 фо
мирования управляющих сигналов поступает разрешаюпщй сигнал на формирование повторной команды для управ.ления механизмом 11 закрывания крышек пробоотборников. Если повторные командные сигналы вызьшают срабатьгвание механизма 11 закрывания крышек пробоотборников, индикатор в блоке 3 цифровой индикации сигнализирует
которого операторфиксирует глубину, на которой произошло ложное срабатывание .
Применение изобретения позволяет сократить эксплуатационные расходы и повысить достоверность результатов опробования путем устранения пропусков во взятии проб на отдельных горизонтах. 53 об этом, а блок 5 контроля запрещает формирование повторных команд. Повторное незакрытие нескольких пробоотборников подряд свидетельствует о возникновении неисправностей в работе устройства и может служить сигналом для прекращения зондирования, подъема устройства на борт судна, вьшвления и устранения неисправностей устройства. В этом случае производится экономия забортного времени за счет исключения зондирования неисправным устройством. Если пробоотборник 12 срабатывает не по команде с блока 2 формирования управляющих сигналов, а от помех, то сигнал с датчика 10 срабатывания крьш1ек пробоотборников через элементысвязи 9 и А поступает в блок 3 цифровой индикации, по табло
Ptfe./
Г
11
1Э
q

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического отбора проб воды | 1977 |
|
SU726469A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1984 |
|
SU1249380A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| Устройство для автоматического отборапроб воды | 1974 |
|
SU509816A1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 1991 |
|
RU2012863C1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1978 |
|
SU731347A1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 1991 |
|
RU2012862C1 |
| Устройство для отбора проб жидкости | 1980 |
|
SU887989A1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 2002 |
|
RU2214588C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ ВОДЫ НА ЗАДАННЫХ ГЛУБИНАХ по авт. св. № 607125, от личающееся тем, что, с целью упрощения устройства, уменьшения габаритов и повышения надежности его, датчик закрывания крьшгек пробоотборников выполнен в виде импульсного трансформатора, порогового элемента и одновибратора, подключенного выходом к входу элемента связи погружаемого герметичного контейнера, при этом первичная ойротка импульсного трансформатора соединена с механизмами закрывания крышек всех пробоотборников, а вторичная обмотка импульсного трансформатора соединена через пороговый элемент с входом одновиб- , ратора. 
Г : и :
, I
I.I . II I
19
пит
Риг.г
,1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1976 |
|
SU607125A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
