Изобретение относится к устройствам для автоматического отбора проб воды на различных глубинах и может быть использовано при проведении океанологических исследований.
Известно устройство для автоматического отбора проб воды, содержащее надводный блок управления, состоящий из взаимосвязанных блока формирования управляющих сигналов, блока цифровой индикации глубины погружения и элемента связи, погружаемый герметичный контейнер с элементом связи, блоком приема управляющих сигналов и датчиком давления пробоотборники и механизмы закрывания их крышек 1 .
Недостатком известного устройств является то, что в качестве линии связи между надводным блоком и погружаег м герметичным контгёйнером для передачи управляющих сигналов используется кабель-трос, который недостаточно надежен, так как при морском волнении в результате рывков возможны обрывы внутренней жилы нарушение изоляции кабель-троса, затекание морской воды и замыкание электрической цепа.
Кроме того, недостатком известного устройства является и то, что в нем отсутствует контроль за срабатыванием механизмов за1срыванйя крышек пробоотборников, ибо, как показала практика, .vюжeт происходить неполнов закрытие последних, а также самопроизвольное Срабатывание механизма закрывания, что резко снижает досoтоверность Отобранных проб.
Целью изобретения является повышение надежности устройства и увеличение достоверности получаемых проб воды.
5
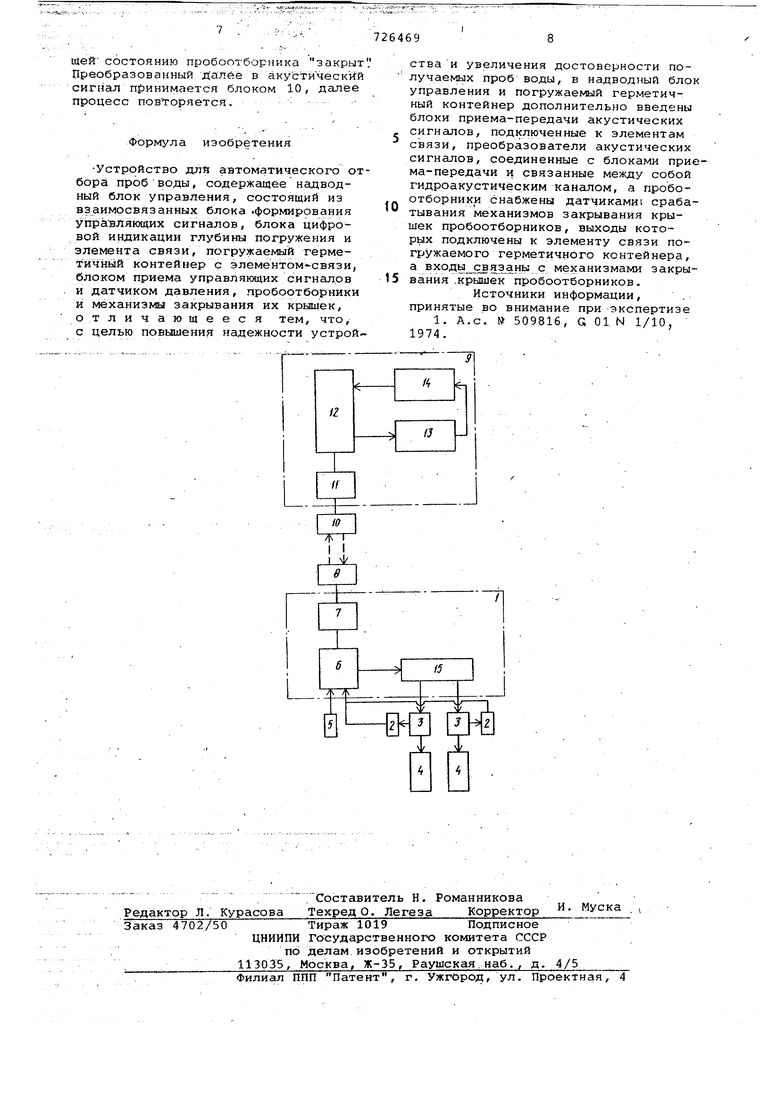
Указанная цель достигается тем, что в надводный блок управления и погружаемый герметичный контейнер дополнительно введены блоки приема-передачи акустических сиГналов, под0ключенные к элементам связи, преобразователи акустических.сигналов, соединенные с блоками приема-передачи и связанные между собой гидроакустическим каналом, а пробоотборники снаб5жены датчиками срабатывания механизмов закрывания крышек пробоотборников, выходы которых подключены к элементу связи погружаемого герметичного контейнера, а входы связаны с механизмами закрывания крышек пробоотборников. На чертеже представлена блок-схема устройства для автоматического отбора проб воды. Устройство состоит из погружаемого герметичного контейнера 1, датчи| ов 2 срабатывания, механизмов 3 зак эывания, крышек-пробоотборников 4, датчика 5 давления, элемента 6 связи, блока 7 приема-передачи акустических сигналов, преобразователя 8 электрических сигналов в акустические, надводного блока 9, включающего преобразователь 10, блок 11 приема-передачи акустических сигналов, элемент 12 связи, блок 13 цифровой индикации глубины погружения, блок 14 формирования управляющих воздействий и блок 15 приема управляющих сигналов, размещенный в погружаемом герметичном контейнере 1. Надводный блок 9 представляет со|бой корпус, в котором размещены бло 14 формирования управляющих сигналов блок 13 цифровой индикации, элемент 12 связи, блок 11 приема-передачи. К надводному блоку относится также пьез керамический преобразователь 10, расположенный за бортом судна в воде. Блок 14 предназначен для формирования управляющих воздействий на закрытие пробоотборников .и содержит поро говые устройства, электронный ключ, формирователь импульсов и электрически связан с блоком 13 цифровой индикации и блоком 11 приема-передачи. Блок 13 служит для цифровой индикации глубины погружения контейнера и номера закрывшегося пробоотборника Он содержит цифровой частотомер, элек тронные фильтры и цифровое табло.Цифр вое табло и индикаторная панель часто томера расположены на передней стенке корпуса надводного блока 9. Электрически блок 13 связан с элементом 12 связи и с блоком 14 формирования управляющих воздействий. Элемент 12 связи предназначен для последовательной коммутации выхбдной цепи блока 11 приема-передачи с вход ными цепями блока 13. Он содержит эл тронный коммутатор, детектор, электронные ключи и электрически связан с блоком 11 приема-передачи. Блок 11 приема-передачи служит дл уси гёнйя сигналов, посылаемых с судн и сигналов, поступающих от подводного кон гейнера. Он содержит усилитель, г Heptexop несущей частоты, модулятор, усилитель мощности и электрически св зан с пьезокерамическим преобразователем 10, элементом 12 связи и блоком 14. Пьезокерамический преобразователь 10, предназначенный Для преоб)разования поступающих акустических сигна лов в электрические, заключенв заполненный маслом герметичный корпус, имеющий акустически прозрачную резиновую мембрану. Он размещается за бортом судна в воде и электрически связан с блоком 11 коаксиальным кабелем. . Блоки 11, 12,14 выполнены на электродных микросхемах и смонтированы на одной печатной плате. Погружаемый контейнер 1 представляет собой стальной полый цилиндр, герметично закрывающийся с двух сторон стгшьными крышками. Внутри контейнера находится блок 7 приема-передачи, элемент f связи, блок 15 приема управляющих сигналов, датчик 5 давления, электронные схемы датчиков 2 срабатывания механизмов 3.крышек Пробоотборников 4. Снаружи контейнера расположены Пьезокерамический преобразователь 8, штуцер Датчика 5 давления, датчики 2 срабатывания пробоотборников, механизмы 3 закрывания крышек пробоотборников, пробоотборники 4. Пьезокерамический преобразователь 8 конструктивно выполнен аналогично преобразователю io. Он размещается на верхней крышке контейнера и электрически связан коаксиальным кабелем через герметичный ввод с блоком 7. Блок 7 приема-передачи предназначен для выполнения функций аналогично блоку 11 и имеет аналогичную конструктивную и электрическую схему. Электрически он связан с преобразователем 8 и блоком 15. Элемент 6 связи служит для последовательной коммутации датчиков 5 и 2 к модулятору блока 7. Он содержит электронный коммутатор, электронные ключи, генератор синхронизирукяцих импульсов и электрически связан с датчиками 5, 2 и блоком 7. Блок 15 приема управляющих сигналов служит для формирования из принятых и усиленных в блоке 7 команд сигналов управляющих импульсов и подачи их в порядке их следования на исполнительное устройство механизмов закрывания крышек пробоотборников. Он содержит формирователь импульса, регистр сдвига, электронное реле, разрядные конденсаторы. Электрически блок 15 связан с блоком 7 и через герметичные вв.оды - с механизмами 3 закрывания крышек пробоотборников 4. Механизм 3 закрывания крышек пробоотборника состоит ИЗ фиксатора, удерживающего крышку пробоотборника в открытом состоянии, и исполнительного устройства - соленоида. Фиксаторы расположены на пробоотборниках в местах крепления верх- них крышек. Соленоиды закреплены снаружи на стенке контейнера таким образом, что ИХ подвижные штоки находятся над фиксаторами на расстоянии 5-10 мм.Обмотки соленоидов заключены в герметичные корпуса, заполненные маслом. Соленоиды электричес.к.и связаны через герметичные ssojjf с блоком 15. . Каждый из датчиков 2 срабатывания пробоотборников содержит пружину, па ру контактов, фиксатор, удерживающий их в замкнутом состоянии, и мультивибратор. Пружина, контакты и фикса, тор смонтированы вметаллическом цилиндрическом корпусе, имеющем наконечник с резьбой, с помощью которого он ввертывается снаружи в резьбовое отверстие в стенке контейнера. Одновременно наконечник является герметичным вводом для электЕ)ической связи контактов о электронной схемой мультивибратора, расположенного внут ри контейнера. Связь датчиков 2 с механизмами 3 закрывания крышек осуществляется Ъ помощью гибких нитей, один конец кот рых связан с фиксатором датчика/ а другой - с крышкой пробоотборника. Датчик 5 давления содержит металлическую мембрану и РС-генератор. Мембрана через передаточный механизм связана с потенциометром, входящим в электрическую цепь генератора. Датчик располагается внутри герметичного контейнера таким образом, что штуцер ввода гидростатического давления выступает .наружу через резьбовое отверстие в стенке контейнера. Датчик электрически связан с элементом б связи. Пробоотборники 4 крепятся на крон штейнах, расположенных на наружной поверхности стенки герметичного контейнера. Блоки 7, 6, 15 и электронные схемы датчиков 5 и 2 смонтированы на трех печатных платах, размещенных внутри герметичного контейнера. Устройство работает следующим образом. Перед погружением герметичного контейнера 1 крышки пробоотборников устанавливаются во взведенное (откры тое) состояние. Взводятся также датчики 2срабатывания механизмов 3 зак рывания крышек пробоотборников 4, для чего их контакты приводятся в замкнутое состояние путем сжатия пру жины. Пружина фиксируется в сжатом положении фиксатором, связанным .гибкой нитью с верхней крышкой пробоотборника 4. Включается питание электронных схем, и контейнер 1 на тросе погружается в воду. При этом с датчика 5 давления .начинает поступать сигнал с частотой, пропорциональной глубине погружения, а с датчиков 2сигналы одной частоты, соответствующей состоянию пробоотборника открьгт Сигналы поступают в элемент б свя зи, из которого с помощью электронного коммутатора в определенной последовательности подаются в блок 7 приема-передачи, где преобразуются в частотно-импульсные модулированные сигналы, усиливаются и поступают на пьезокерамический преобразователь 8. Преобразованные в акустические сигналы излуча отся в сторону надводного блока 9,находящегося на судне. Передача информации осуществляется Периодически с временныминтервалом Т 2Н/1500 сек,где Н-максимальная глубина погружения (м). Принятые преобразователем 10 акустические сигналы, преобразованные в электрические, поступают в блок 11 приема-передачи, в котором усиливаются и далее поступают в элемент 12 связи, детектируются и с помощью электронного коммутатора сигналы от датчиков 2 срабатывания механизмов 3 за- . крывания пробоотборников 4 подаются в блок 13 цифровой индикации, где фиксируется номер пробоотборника, его состояние открыт-закрыт и сигнал о глубине погружения. Одновременно сигнал о глубине погружения поступает из блока 13 цифровой индикаций в блок 14 формирования управляющих воздействий на входы пороговых устройств, каждое из которых настроено на определенную, заранее выбранную глубину погружения. При достижении определенной глубины срабатывает cooтвeтcтвyюJдee пороговое устройство и в блоке 14 вырабатывается управляющий сигнал,поступающий через элемент 12 связи з блок 11 приема-передачи, для формирования сигнала-команды на закрытие пробоотборника. Сформированный и усиленный сигнал команда поступает на преобразователь 10,где преобразуется в акустический и излучается в сторону погружаемого ; контейнера 1. Принятый преобразователем 8 и преобразованный в электрический сигналкоманда поступает в блок 7 приемапередачи, усиливается и подается через элемент 6 связи в блок 15 приема управляющих сигналов на регистр сдвига, выходы которого нагружены на электронные реле, при срабатывании замыкающих цепи питания исполнительных элементов (механизмов 3 закрывания крышек)- соленоидов. Срабатывание соленоидов происходит последовательно, в порядке поступления команд. При срабатывании соленоида его по 1вижный шток ударяет по фиксатору крышки пробоотборника, в результате чего она закрывается и при этом выдергивается связанный с ней гибкой нитью фиксатор датчика 2 срабатывания данного пробоотборника. В результате этого пружина датчика разжимается,кон такты размыкаются и с датчика поступает сигнал с частотой, соответствующей состоянию пробоотборника закрыт . Преобразованный даЛёё в aKycTH4ecKrfft сигнал принимается блоком 10, далее процесс повторяется. Формула изобретения
Устройство ДЛИ автоматического отбора проб воды, содержащее надводный блок управления, состоящий из взаимосвязанных блока .формирования управЛяющих сигналов, блока цифровой индикации глубины погружения и элемента связи, погружаемый герметичный контейнер с элементом связи, блоком приема управляющих сигналов и датчиком давления, пробоотборники и механизмы закрывания их крышек, отличающееся тем, что, с целью повышения надежности устройства и увеличения достоверности получаемых проб воды, в надводяыП блок управления и погружаемый герметичный контейнер дополнительно введены блоки приема-передачи акустических сигналов, подключенные к элементам связи, преобразователи акустических сигналов, соединенные с блоками приема-передачи и связанные между собой гидроакустическим каналом, а пробоотборники снабжены датчиками срабатывания механизмов закрывания крышек пробоотборников, выходы которых подключены к элементу связи погружаемого герметичного контейнера, а входы свяэаны с механизмами закрывания .крышек пробоотборников.
Источники информации, . принятые во внимание при экспертизе
1. А,с. 509816, G 01 N 1/10, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1984 |
|
SU1249380A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1142753A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1978 |
|
SU731347A1 |
| Устройство для автоматического отборапроб воды | 1974 |
|
SU509816A1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 1991 |
|
RU2012863C1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 2002 |
|
RU2214588C1 |
| АВТОНОМНЫЙ ПРОБООТБОРНИК | 1991 |
|
RU2012862C1 |
| ГЛУБОКОВОДНЫЙ ЗОНД ДЛЯ ОТБОРА ПРОБ ЖИДКОСТЕЙ В БАТОМЕТРЫ | 2022 |
|
RU2807544C1 |
