ключей к выходу узла сравнения, являющегося выходом указанного блока, вход
которого подключен к входу усилителядемодулятора.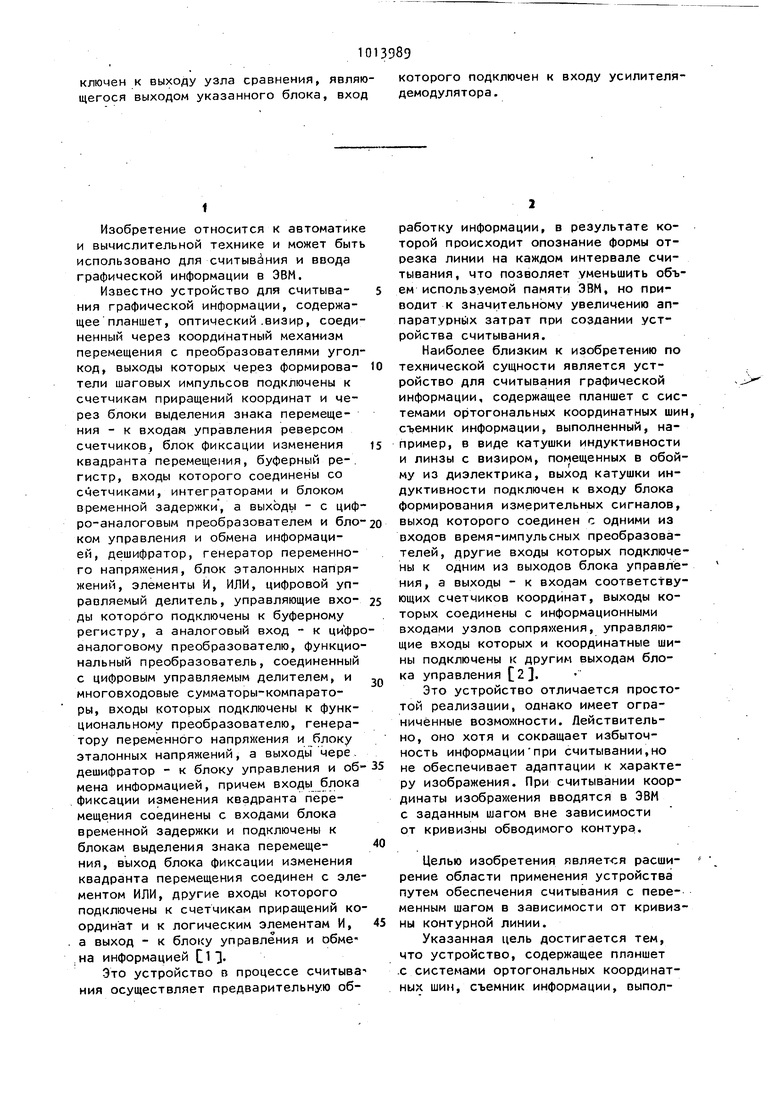
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1990 |
|
SU1728872A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1506460A1 |
| Устройство для считывания графической информации | 1989 |
|
SU1635203A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1112382A2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084841A1 |
| Преобразователь перемещения в код | 1979 |
|
SU866567A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1048493A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1481813A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для считывания и ввода графической информации в ЭВМ.
Известно устройство для считывания графической информации, содержащее планшет, оптический .визир, соединенный через координатный механизм перемещения с преобразователями уголкод, выходы которых через формирователи шаговых импульсов подключены к счетчикам приращений координат и через блоки выделения знака перемещения - к входай управления реверсом счетчиков, блок фиксации изменения квадранта перемещения, буферный ре-, гистр, входы которого соединены со счетчиками, интеграторами и блоком временной задержки, а выходы - с цифро-аналоговым преобразователем и блоком управления и обмена информацией, дешифратор, генератор переменного напряжения, блок эталонных напряжений, элементы И, ИЛИ, цифровой управляемый делитель, управляющие входы которого подключены к буферному регистру, а аналоговый вход - к цифроаналоговому преобразователю, функциональный преобразователь, соединенный с цифровым управляемым делителем, и многовходовые сумматоры-компараторы, входы которых подключены к функциональному преобразователю, генератору переменного напряи ения и блоку эталонных напряжений, а выходы чере. дешифратор - к блоку управления и обмена информацией, причем входы блока фиксации изменения квадранта перемещения соединены с входами блока временной задержки и подключены к блокам выделения знака перемещения, выход блока фиксации изменения квадранта перемещения соединен с элементом ИЛИ, другие входы которого подключены к счетчикам приращений координат и к логическим элементам И, а выход - к блоку управления и обмена информацией С ЗЭто устройство в процессе считыва ния осуществляет предварительную обработку информации, в результате которой происходит опознание формы отрезка линии на каждом интервале считывания, что позволяет уменьшить объем используемой памяти ЭВМ, но приводит к значительному увеличению аппаратурнь1х затрат при создании устройства считывания.
Наиболее близким к изобретению по технической сущности является устройство для считывания графической информации, содержащее планшет с системами ортогональных координатных ши съемник информации, выполненный, например, в виде катушки индуктивности и линзы с визиром, помещенных в обойму из диэлектрика, выход катушки индуктивности подключен к входу блока формирования измерительных сигналов, выход которого соединен с одними из входов время-импульсных преобразователей, другие входы которых подключены к одним из выходов блока управления , а выходы - к входам cooTBeTctsyющих счетчиков координат, выходы которых соединены с информационными входами узлов сопряжения, управляющие входы которых и координатные шины подключены к другим выходам блока управления 2.
Это устройство отличается простотой реализации, однако имеет ограниченные возмо ;(ности. Действительно, оно хотя и сокращает избыточность информациипри считывании,но не обеспечивает адаптации к характеру изображения. При считывании координаты изображения вводятся в ЭВМ с заданным шагом вне зависимости от кривизны обводимого контура.
Целью изобретения является расширение области применения устройства путем обеспечения считывания с пеоеменным шагом в зависимости от кривизны контурной линии.
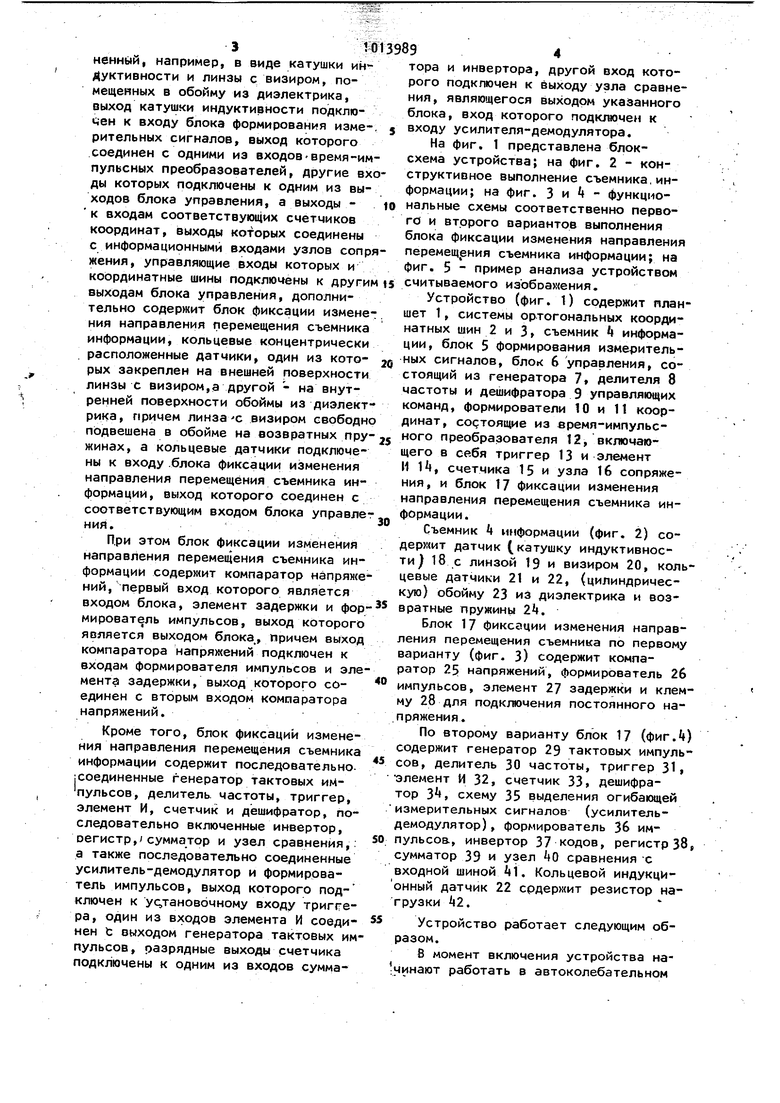
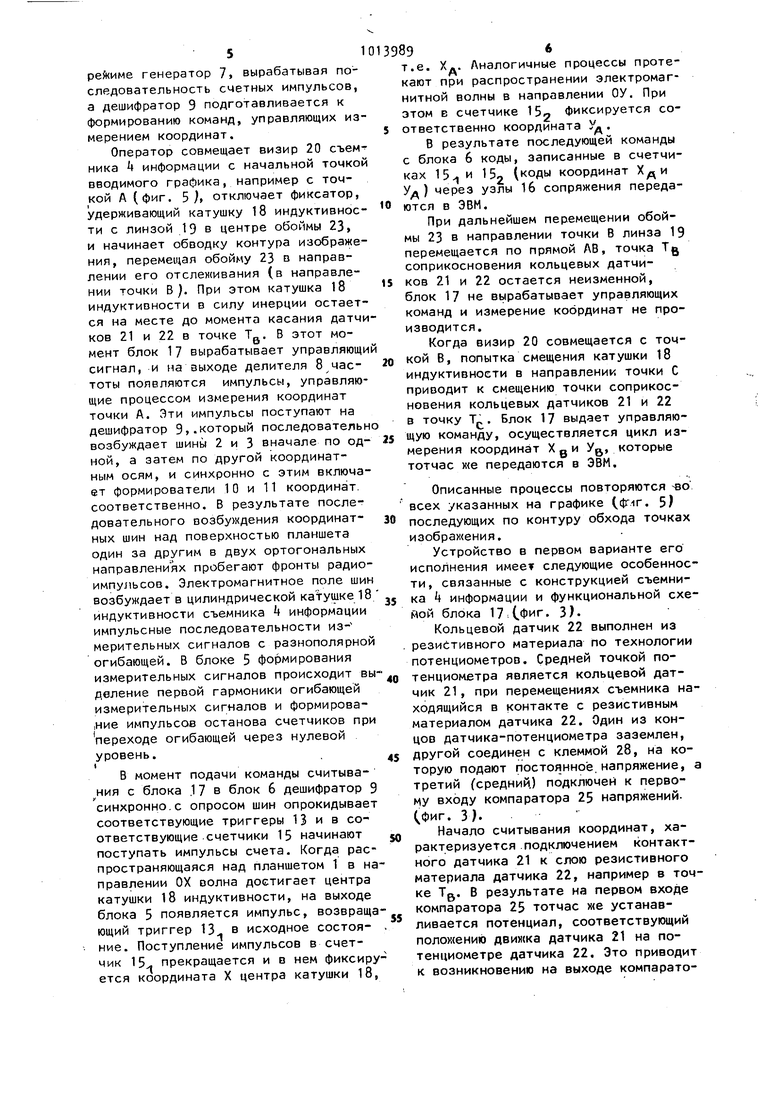
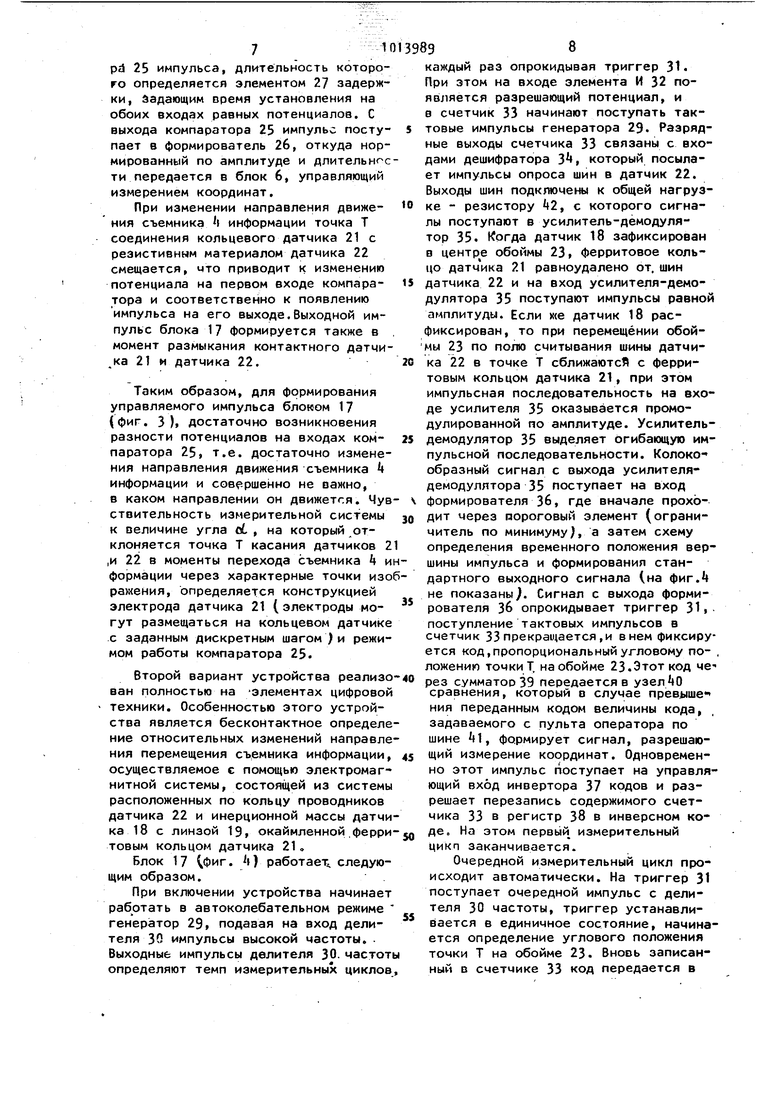
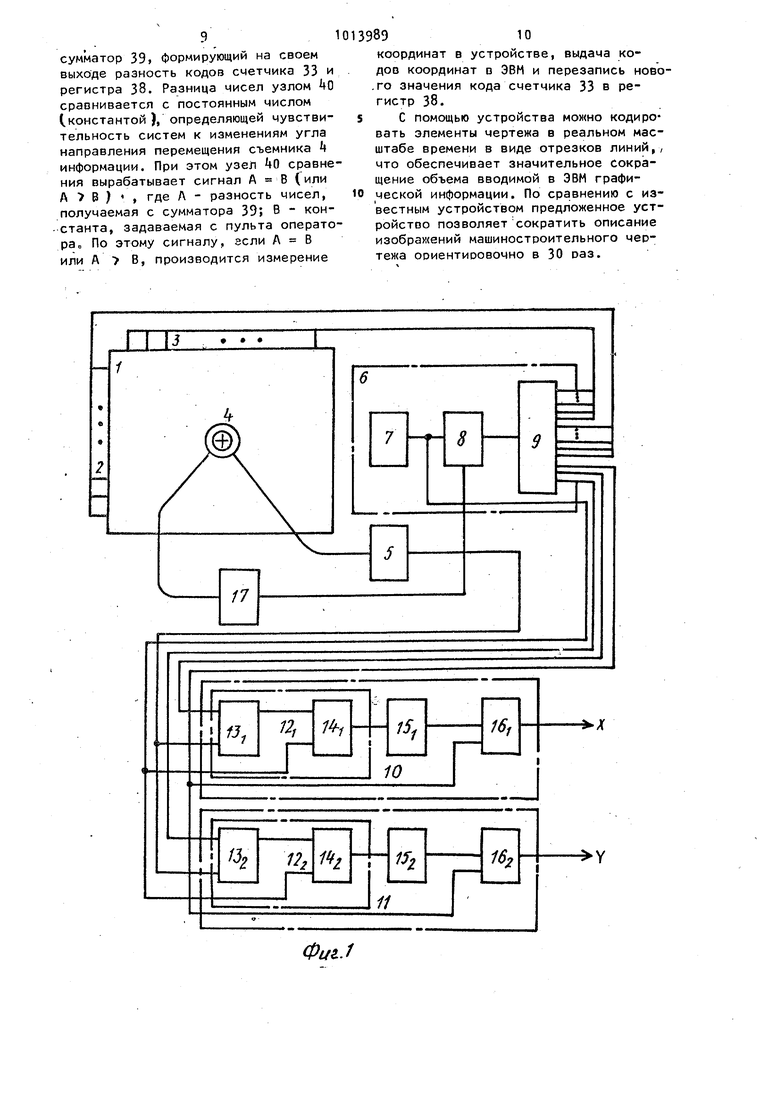
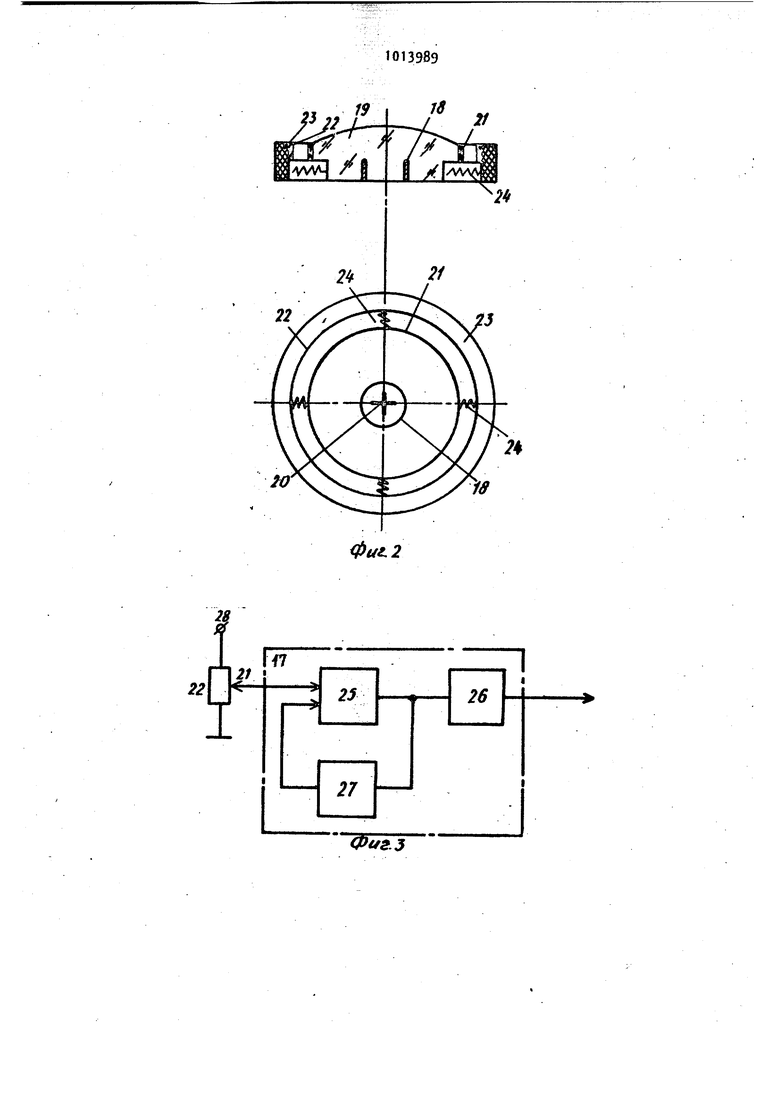
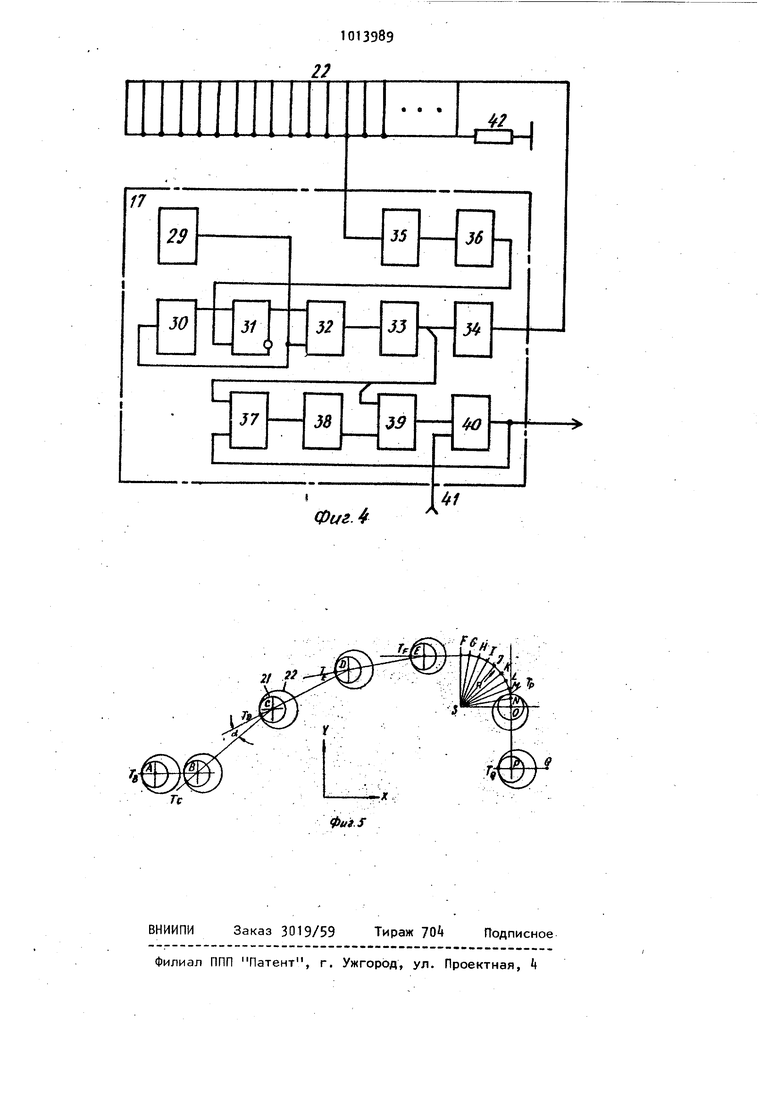
Указанная цель достигается тем, что устройство, содержащее планшет .с системами ортогональных координатных шин, съемник информации, оыпол310ненный, например, в виде катушки индуктивности и линзы с визиром, помещенных в обойму из диэлектрика, выход катушки индуктивности подключен к входу блока формирования измерительных сигналов, выход которого соединен с одними из входов-время-им пульсных преобразователей, другие вх ды которых подключены к одним из выходов блока управления, а выходы к входам соответствующих счетчиков координат, выходы которых соединены с информационными входами узлов сопр жения, управляющие входы которых и координатные шины подключены к други выходам блока управления, дополнительно содержит блок фиксации измене ния направления перемещения съемника информации, кольцевые концентрически расположенные датчики, один из которых закреплен на внешней поверхности линзы с визиром,а другой - на внутренней поверхности обоймы из диэлект рика, причем линзаС визиром свободн подвешена в обойме на возвратных пру жинах, а кольцевые датчики- подключены к входу .блока фиксации изменения направления перемещения съемника информации, выход которого соединен с соответствующим входом блока управле П.ри этом блок фиксации изменения направления перемещения съемника информации содержит компаратор напрям{е ний, первый вход которого является входом блока, элемент задержки и фор мирователь импульсов, выход которого является выходом блока., причем выход компаратора напряжений подключен к входам формирователя импульсов и эле мента задержки, выход которого соединен с вторым входом компаратора напряжений. Кроме того, блок фиксаций изменения направления перемещения съемника информации содержит последовательно, iсоединенные генератор тактовых импульсов, делитель, частоты, триггер, элемент И, счетчик и дешифратор, последовательно включенные инвертор, регистр,сумматор и узел сравнения, а также последовательно соединенные усилитель-демодулятор и формирователь импульсов, выход которого подключен к установочному входу триггера, один из входов элемента И соединен t выходом генератора тактовых им пульсов, разрядные выходы счетчика подключены к одним из входов сумма9тора и инвертора, другой вход которого подключен к выходу узла сравнения, являющегося выходом указанного блока, вход которого подключен к входу усилителя-демодулятора. На фиг. 1 представлена блоксхема устройства; на фиг. 2 - конструктивное выполнение съемника,информации; на фиг. 3 и t - функциональные схемы соответственно первого и второго вариантов выполнения блока фиксации изменения направления перемещения съемника информации; на фиг. 5 - пример анализа устройством считываемого изобоах ения. Устройство (фиг. 1) содержит планшет 1, системы ортогональных координатных шин 2 и 3 съемник i информации, блок 5 формирования измерительных сигналов, блок 6 управления, состоящий из генератора 7, делителя 8 частоты и дешифратора 9 управляющих команд, формирователи 10 и 11 координат, со ;тоящие из время-импульсного преобразователя 12, включающего в себя триггер 13 и элемент И }Ц, счетчика 15 и узла 16 сопряжения, и блок 17 фиксации изменения направления перемещения съемника информации. Съемник k информации (фиг. 2) содержит датчик (катушку индуктивности) 18 с линзой 19 и визиром 20, кольцевые датчики 21 и 22, (цилиндрическую) обойму 23 из диэлектрика и возвратные пружины 2. Блок 17 фиксации изменения направления перемещения съемника по первому варианту (фиг. 3) содержит компаратор 25 напряжений, формирователь 26 импульсов, элемент 27 задержки и клемму 28 для подк/вочения постоянного напряжения. По второму варианту блок 17 (фиг.) содержит генератор 29 тактовых импульсов, делитель 30 частоты, триггер 31 элемент И 32, счетчик 33, дешифратор З, схему 35 выделения огибающей измерительных сигналов (усилительдемодулятор) , формирователь 36 импульсоа, инвертор 37 кодов, регистр 38, сумматор 39 и узел ЦО сравнения с входной шинойV. Кольцевой индукцйонный датчик 22 срдержит резистор нагрузки 2. Устройство работает следующим образом. В момент включения устройства на чинают работать в автоколебательном генератор 7, вырабатывая последовательность счетных импульсов, а дешифратор 9 подготавливается к формированию команд, управляющих измерением координат. Оператор совмещает визир 20 съемника k информации с начальной точкой вводимого графика, например с точкой А (фиг. 5 , отключает фиксатор, удерживающий катушку 18 индуктивноети с линзой 19 в центре обоймы 23, и начинает обводку контура изображения, перемещая обойму 23 в направлении его отслеживания (в направлении точки В). При этом катушка 18 индуктивности в силу инерции остается на месте до момента касания датчи ков 21 и 22 в точке Т„. В этот момент блок 17 вырабатывает управляющи сигнал, и на выходе делителя 8 частоты появляются импульсы, управляющие процессом измерения координат точки А. Эти импульсы поступают на дешифратор 9,.который последовательн возбуждает шины 2 и 3 вначале по одной, а затем по другой координатным осям, и синхронно с этим включает формирователи 10 и 11 координат, соответственно. В результате последовательного возбуждения координатных шин над поверхностью планшета один за другим в двух ортогональных направлениях пробегают фронты радиоимпульсов. Электромагнитное поле шин возбуждает в цилиндрической KatyuiKe 18 индуктивности съемника информации импульсные последовательности измерительных сигналов с разнополярной огибающей. В блоке 5 формирования измерительных сигналов происходит вы деление первой гармоники огибающей измерительных сигналов и формирова,ние импульсов останова счетчиков при переходе огибающей через нулевой уровень. 1 В момент подачи команды считыва ния с блока .17 в блок 6 дешифратор 9 синхронно,с опросом шин опрокидывает соответствующие триггеры 13 и в соответствующие счетчики 15 начинают поступать импульсы счета. Когда распространяющаяся над планшетом 1 в на правлении ОХ волна достигает центра катушки 18 индуктивности, на выходе блока 5 появляется импульс, возвраща ющий триггер 13 в исходное состояние. Поступление импульсов в счетчик 15 прекращается и в нем фиксиру ется координата X центра катушки 18, Т.е. Хд. Аналогичные процессы протекают при распространении электромагнитной волны в направлении ОУ. При этом Е счетчике 15 фиксируется соответственно координата У.. В результате последующей команды с блока 6 коды, записанные в счетчиках 15 и 5у (коды координат Уд) через узлы 16 сопряжения передаются в ЭВМ. При дальнейшем перемещении обоймы 23 в направлении точки В линза 19 перемещается по прямой АВ, точка Tg соприкосновения кольцевых датчиков 21 и 22 остается неизменной, блок 17 не вь1рабатывает управляющих команд и измерение координат не производится. Когда визир 20 совмещается с точкой В, попытка смещения катушки 18 индуктивности в направлении точки С приводит к смещению точки соприкосновения кольцевых датчиков 21 и 22 в точку Т. Блок 17 выдает управляющую команду, осуществляется цикл измерения координат X о и Уц, которые тотчас передаются в ЭВМ. Описанные процессы повторяются -во всех указанных на графике (,фг1г. 5) последующих по контуру обхода точках изображения. Устройство в первом варианте его исполнения имеет следующие особенности, связанные с конструкцией съемника Ц информации и функциональной схейой блока 17с(фиг. 3). Кольцевой датчик 22 выполнен из резистивного материала по технологии потенциометров. Средней точкой потенциометра является кольцевой датчик 21, при перемещениях съемника находящийся в контакте с резистивным материалом датчика 22. Один из концов датчика-потенциометра заземлен, другой соединен с клеммой 28, на которую подают постоянное.напряжение, а третий (средний.) подключен к первому входу компаратора 25 напряжений, (фиг. 3). Начало считывания координат, характеризуется подключением контактного датчика 21 к слою резистивного материала датчика 22, например в точке Tg. В результате на первом входе компаратора 25 тотчас же устанавливается потенциал, соответствующий полоксению движка датчика 21 на потенциометре датчика 22. Это приводит к возникновению на выходе компаратоpd 25 импульса, длительность которого определяется элементом 27 задержки, Задающим время установления на обоих входах равных потенциалов. С выхода компаратора 25 импульс поступает в формирователь 26, откуда нормированный по амплитуде и длительн(с ти передается в блок 6, управляющий измерением координат. При изменении направления движения съемника | информации точка Т соединения кольцевого датчика 21 с резистивннм материалом датчика 22 смещается, что приводит к изменению потенциала на первом входе компаратора и соответственно к появлению импульса на его выходе.Выходной импульс блока 17 формируется также в момент размыкания контактного датчи ,ка 21 и датчика 22. Таким образом, для формирования управляемого импульса блоком 17 (фиг. 3), достаточно возникновения разности потенциалов на входах компаратора 25, т.е. достаточно изменения направления движения съемника k информации и совершенно не важно, в каком направлении он движется. Чув ствительность измерительной системы к величине угла d , на который отклоняется точка Т касания датчиков 2 ,и 22 в моменты перехода съемника k и формации через характерные точки изо ражения, определяется конструкцией электрода датчика 21 (электроды могут размещаться на кольцевом датчике с заданным дискретным шагом ) и режимом работы компаратора 25. Второй вариант устройства реализо ван полностью на -элементах цифровой техники. Особенностью этого устройства является бесконтактное определе ние относительных изменений направле ния перемещения съемника информации, осуществляемое с помощью электромагнитной системы, состоящей из системы расположенных по кольцу проводников датчика 22 и инерционной массы датчика 18 с линзой 19, окаймленной .ферритовым кольцом датчика 21, Блок 17 фиг. ) работает., следующим образом. При включении устройства начинает работать в автоколебательном режиме генератор 29, подавая на вход делителя 30 импульсы высокой частоты. . Выходные импульсы делителя 30. частоты определяют темп измерительных циклов. каждый раз опрокидывая триггер 31. При этом на входе элемента И 32 появляется разрешающий потенциал, и в счетчик 33 начинают поступать тактовые импульсы генератора 29. Разрядные выходы счетчика 33 связаны с входами дешифратора 3, который посылает импульсы опроса шин в датчик 22. Выходы шин подключены к общей нагрузке - резистору 2, с которого сигналы поступают в усилитель-демодулятор 35. Когда датчик 18 зафиксирован в центре обоймы 23, ферритовое кольцо датчика 21 равноудалено от. шин датчика 22 и на вход усилителя-демодулятора 35 поступают импульсы равной амплитуды. Если датчик 18 расфиксирован, то при перемещении обоймы 23 по полю считывания шины датчика 22 в точке Т сближаются с ферритовым кольцом датчика 21, при этом импульсная последовательность на входе усилителя 35 оказывается промодулированной по амплитуде. Усилительдемодулятор 35 выделяет огибающую импульсной последовательности. Колоко образный сигнал с выхода усилителядемодулятора 35 поступает на вход формирователя 36, где вначале проходит через пороговый элемент (ограничитель по минимуму, а затем схему определения временного положения вершины импульса и формирования стандартного выходного сигнала (на фиг. не показаны. Сигнал с выхода формирователя 36 опрокидывает триггер 31i поступление тактовых импульсов в счетчик 33 прекращается,и в нем фиксируется код,пропорциональный угловому по- , ложению точки на обойме 23.Этот код через сумматор ЗЭпередается в узел JO сравнения, который в случае превыше ния переданным кодом величины кода, задаваемого с пульта оператора по шине I, формирует сигнал, разрешаюЧ измерение координат. Одновременно этот импульс поступает на управляющий вход инвертора 37 кодов и разрешает перезапись содержимого счетчика 33 в регистр 38 в инверсном коде На этом первый измерительный цикп заканчивается. Очередной измерительный цикл происходит автоматически. На триггер 31 поступает очередной импульс с делителя 30 частоты, триггер устанавливается в единичное состояние, начинается определение углового положения точки Т на обойме 23. Вновь записанный в счетчике 33 код передается в сумматор 39, формирующий на своем выходе разность кодов сметчика 33 и регистра 38. Разница чисел узлом 40 сравнивается с постоянным числом (константой ), определяющей чувствительность систем к изменениям угла направления перемещения съемника Ц информации. При этом узел tO сравне ния вырабатывает сигнал А В Сили А 7 В ) , где А - разность чисел, получаемая с сумматора 39; В - константа, задаваемая с пульта операто ра. По этому сигналу, гели А В или А 7 В, производится измерение 8910 координат в устройстве, выдача кодов координат в ЭВМ и перезапись ново.го значения кода счетчика 33 в регистр 38. С помощью устройства можно кодировать элементы чертежа в реальном масштабе времени в виде отрезков линий,, что обеспечивает значительное сокращение объема вводимой в ЭВМ графической информации. По сравнению с известным устройством предложенное устройство позволяет сократить описание изобрах ений машиностроительного чертежа ооиентиоовочно в 30 оаз.
.
И
18
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке N 3002792/18-2, | |||
| кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
