1
Изобретение относится к текстильному машиностроению и может быть использовано в ремизоподъемных каретках типа Гаттерслей
Наиболее близкой к изобретению по технической сущности и достигаемому результату является ремизоподъемная каретка ткацкого станка, содержащая балансир, шарнирно соединенный серединой с выходным рь чагом, установленный с возможностью контактирования концами с подвижными и неподвижными упорами и шарнирно связанньй концами с крючками, смонтированными с возможностью зацепления и расцепления с имеющими вьтуклые поверхности для контактирования с крючками неподвижными и подвижными ножами, последние из которых связаны с приводом и установлены с возможностью качания относительно горизонтальной оси, расположенной на равном расстоянии открючков, и средства поворота неподвижных и подвижных ножейдля выбора и образования зазоров в период переключения между ножами и крючками Cl 3 Недостатком данной каретки является образование значительных по величине зазоров между крючками и балансиром в период их переключения, что создает шум при работе каретки ft снижает ее надежность.
Цель изобретения - повьрение надежности работы каретки и устранение шума.
Указанная цель достигается тем, 4fTo в ремизоподъемной каретке ткацкого станка, содержащей балансир, шарнирно соединенный серединой с выходным рычагом, установленный с возможностью контактирования концами с подвижными и неподвижными упорами и шарнирно связанный концами с крючками, смонтированными с возможностью зацепления и расцепления и имеющими выпуклые поверхности для контактирования с крючками неподвижными и Подвижными ножами, последние из которых связаны с приводом и установлены й возможностью качания относительно горизонтальной оси, расположенной на равном расстоянии от крючков, и средства поворота неподвижных и подви;{сных ножей для выбора и образования зазоров в период переклкгчения между ножами и крючками, поверхности крючков, контактирукицими с ножами.
14346,2
выполнены плоскими, при этом поверхности подвижных и неподвижных упоров, контактирующие с концами балансира, расположены перпендикулярно к 5 линиям, проходящим соответственно через точки контакта подвижных и неподвижных ножей с крючками и через точки контакта балансира соответственно с подвижными и неподвижными 10 упорами и вьтолнены по дугам окружностей с центрами в точках контакта крючков соответственно с подвижными и неподвижными ножами.
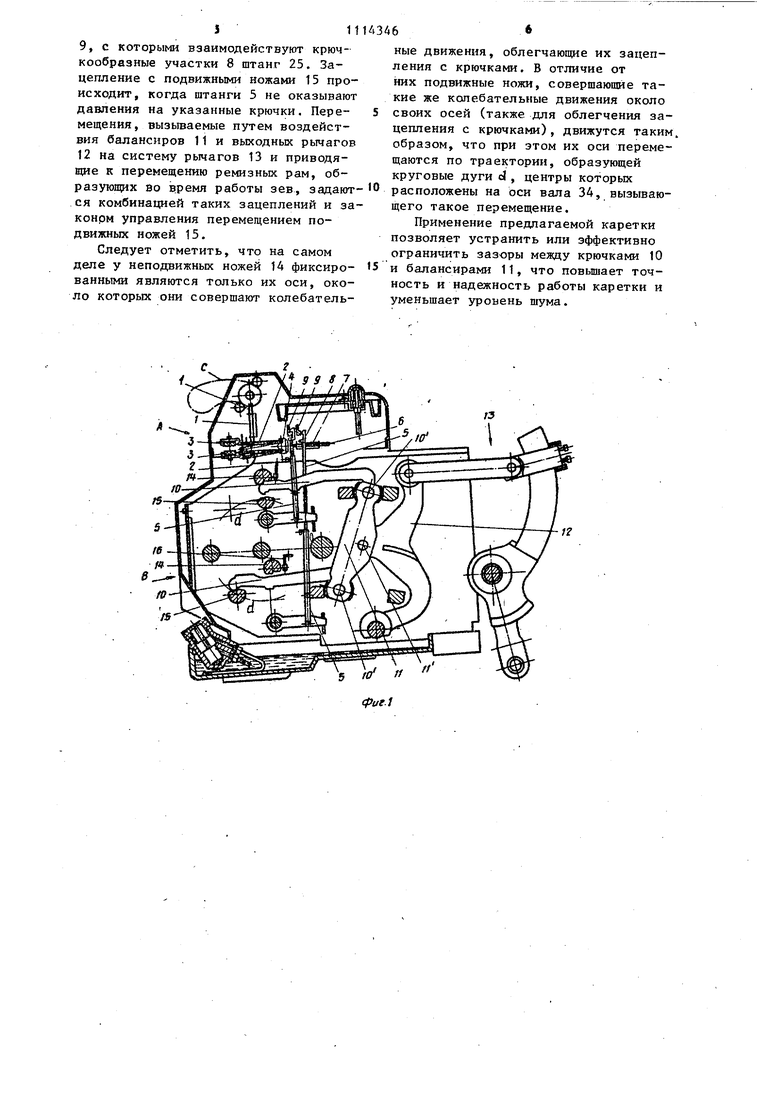
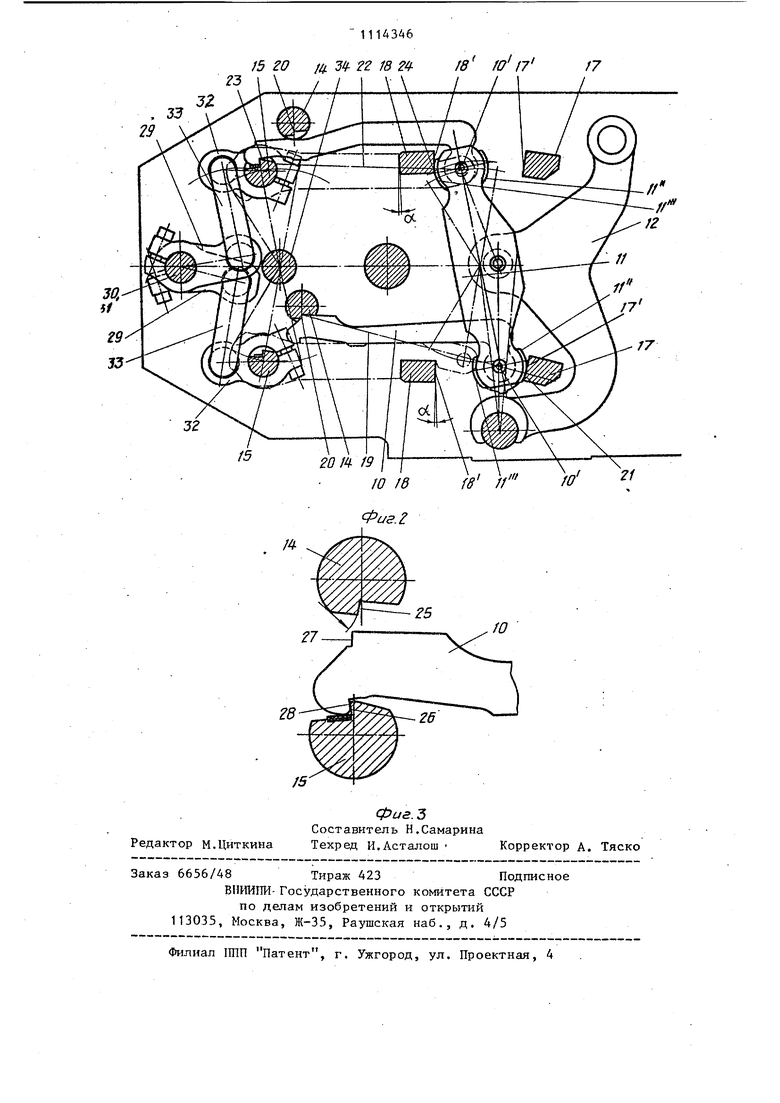
На фиг. 1 схематически представt5 лена предлагаемая ремизоподъемная каретка; на фиг. 2 - средство поворота неподвижных и подвижных ножей для выбора и образования зазоров; на фиг. 3 - зона зацепления крючков
20 ремизоподъемной каретки с ножами (увеличено).
На фиг. 1 показана каретка, включающая узел считывания А и узел управления В. Узел считывания пред5 назначен для считывания кода с перфорированной бумажной ленты С и содержит считывающие иголки 1, упорные стержни 2, качающиеся под управлением иголок 1, нажимные рейки 3
0 для зацепления и толкания стержней 2, избираемых иголками 1, и качающиеся рычаги управления 4, приводимые в действие посредством стержней 2. Узел управления 6 предназначен для
j задания перемещения ремизных рам
под управлетем узла считывания А и содержит вертикальные штанги управления 5, приводимые в действие горизонтальными иголками 6, на которые
0 воздействуют тяги 4 и возвратные пружины 7 с целью зацепления и расцепления с подъемными упорами 9 при помощи крючкообразных участков верхних концов 8 штанг 5. Кроме того,
5 он содержит крючки 10, шарнирно
соединенные в точке 10 с концами ба« лансиров 11, которые, в свою «эчередь, шарнирно соединены в точке 11 с центрами выходных рычагов 12, приQ водящих в действие систему рычагов
13для управления перемещением ремизных рам. Управление балансирами 11 осуществляется путем зацепления крючков 10 с Неподвижными ножами
14и подвижными ножами 15.
Указанные крючки опускаются, как правило, под действием планок 16 для опускания крючков, которые обес311
печивают расцепление крючков с неподвижньп и ножами и содействуют их зацеплению с пбдвижными ножами. Перемещение балансиров 11 ограничиваютс я при движении во внешнем направлении неподвижными упорами 17, а при движении в направлении вовнутрь - подвижными упорами 18 (фиг.2) посредством системы управления, на которую трудно воздействовать, поскольку в ней легко образуется зна:чительньп 1 зазор, что обусловлено сложными траекториями, вдоль которых перемещаются точки
10шарнирного соединения концов крючков 10 с балансирами 11.
С целью предотвращения или по меньшей мере эффективного ограничения величин) этого зазора предусматривается расположение тех поверхностей 17неподвижных упоров 17 которые входят в зацепление с концами балансиров 11, перпендикулярно линиям 19, соединяющим точки контакта 21 между концами 11 балансиров
11неподвижными упорами 17. Кроме того, в предлагаемом устройстве поверхности 17имеют вогнутые проФили, образованные круговыми дугами, . центры которых находятся в точках контакта 20 между крючками 10 и неподвижными ножами 14. I
Зацепление между балансирами 11 и подвижными упорами 18 осуществляется путем выбора местоположения поверхностей 18упоров, которые входят в зацепление с участками 11 балансиров 11. Фактически поверхности 18 располагаются перпендикулярно линиям 22, соединяющим точки контакта 23 между крючками 10 и подвижными упорами 15 со средними точками контакта 24 между концами балансиров 11 и подвижными упорами 18i. Помимо этого те поверхности 18упоров 18, которые предназначены -для образования контакта с участками балансиров 11, имеют выпуклые профили, задаваемые круговыми дугами, центры которых расположены в точках со,при- косновения 23 мевду крючками 10 и . подвижными ножами 15.,
Предусмотрено, чтобы по меньшей мере одна из контактных поверхностей на участке соприкосновения мелоду .крючками 10 и ножами 14 и 15 имела вьшуклый профиль.
64
На фиг. 3 представлен вариант предлагаемого устройства, в котором выпуклые поверхнос-ти находятся на участках 25 и 26 ножей 14 и 15, тогда соответствующее им поверхности 27 и 28 крючков 10 плоские, причем для поверхностей 25 и 26 выбирается небольшой радиус г. . На фиг. 2 показаны средстйа поворота подвижных и неподвижных ножей Д.ПЯ выбора и образования зазоров в период переключения между ножами и крючками, вьшопненные в виде рычажных механизмов, представляю1цих собой шарнирно сочлененные параллелограммы, заставляющие, подвижные ножи 15 совершать колебательные движения около своих осей для обеспечения небольшого зазора в момент их
зацепления или разъединения с крючками 10 и для устранения этого зазора по окончании образования зацепления .
Рычажные механизмы содержат рычаги 29, прикрепленные к прилегающим друг к другу и расположенным на одной линии валам 30 и 31, рычаги 32, прикрепленные к ножам 15, и соединительные тяги 33, которые соедикяют рычаги 29 и 32. Рычажные механизмы, которые образуют параллелограмм с вершинами, расположенными на осях ножей 15, в центрах шарнировсоединительных тяг 33 и на оси 34, вокруг которого перемещаются подвижные Ножи, на самом деле имеют конфигурацию неправильного параллелограмма, благо даря которой без дополнительных элементов или устройств обеспечивается дополнительное перемещение ножей, I что приводит к более эффективному устранению зазора во время работы по cpaвнeнIiю с обычными, рычагами механизмами, имеющими конфигурацию
правильного параллелограмма.
В процессе работы каретки при зацеплении с вертикальными штангами 5, крючки 10 поднимаются и опускаются в соответствии с командами, п Ьтупающими от рычагов управления 4 узла считывания А.
Управление балансирами 11 осуществляется путем зацепления крючков 10с неподвижными ножами 14 и подвижными ножами 15. Зацепление с неподвижными нхзжами 14 осуществляется, когда штанги 5 поднимают указанные крючки под действием подъемных упоров i 11 9, с которыми взаимодействуют крючкообразные участки 8 штанг 25. Зацепление с подвижньп и ножами 15 происходит, когда штанги 5 не оказывают давления на указанные крючки. Перемещения, вызьшаемые путем воздействия балансиров 11 и выходных рычагов 12 на систему рычагов 13 и приводящие к перемещению ремизных рам, образующх во в.ремя работы зев, задают ся комбинацией таких зацеплений и за конрм управления перемещением подвижных ножей 15. Следует отметить, что на самом деле у неподвижных ножей 14 фиксированными являются только их оси, около которых они совершают колебатель6ные движения, облегчающие их зацепления с крючками. В отличие от них подвижные ножи, совершающие такие же колебательные движения около своих осей (также для облегчения зацепления с крючками), движутся таким, образом, что при этом их оси перемещаются по траектории, образующей круговые дуги d, центры которых расположены на оси вала 34, вызывающего такое перемещение. Применение предпагаемой каретки позволяет устранить или зффективно ограничить зазоры между крючка№1 10 и балансирами 11, что повышает точность и надежность работы каретки и уменьшает уровень шума.
РЕМИЗОПОДЪЕМНАЯ КАРЕТКА ТКАЦКОГО СТАНКА, содержащая балансир, шарнирно соединенный серединой с выходным рычагом, установленный с возможностью контактирования концами с подвижными и неподвижными упорами и шарнирно связанный концами с крючками, смонтированными с возможностью зацепления и расцепления с имеющими вьтуклые поверхности для контактирования с крючками неподвижными и подвижньми ножами, последние из которых связаны с приводом и установлены с возможностью качания относительно горизонтальной оси, расположенной на равном расстоянии от крючков, и средства поворота неподвиисных и подвижных ножей для выбора и образования зазоров в период переключения между ножами и крючками, о т личающаяся тем, что, с целью повышения надежности работы и устранения шума, поверхности крючков, контактирующие с ножами, вьпопнены плоскими, при этом поверхности подвижных и неподвижных упоров, контактирующие с концами балансира, расположены перпендикулярно к линиям, СО проходящим соответственно через точки контакта подвижных и неподвижных ножей с крючками и через точки контакта балансира соответственно с подвижными и неподвижными упорами, и выполнены по дугам окружностей с центрами в точках контакта крючков соответственно с подвижными и неподвижными ножами. 4 &0 О)
/3
;
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ремизоподъемная каретка с встречным движением ремизок | 1972 |
|
SU445211A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
