Устройства для управления поворотом передней стойки шасси самолета с гидравлическим пргьзодом, состоящим из силового цилиндра, основного распределительного золотника и вспомогательного золотн1 ка с электромагнитным управлением, известны.
Однако известные конструкции сложны и тяжелы по весу.
Отличительной особенностью изобретения является то, что гидравлический привод снабжен электромеханической следяи1ей системой, выполненной по мостовой с.хеме, состойН1ей из двух потенциометров п усилителя, включенного в диагональ моста, причем в качестве задающего потенциометра следящей системы применен иотенпиометр обратной связи рулевой машп;1ки руля поворота с соответствующим каналом усилгггеля автопилота.
Эта особенность позволяет упростить конструкцию, облегчить ее вес ц осуществить поворот передней стойки от обычной системы ножного управления самолетом.
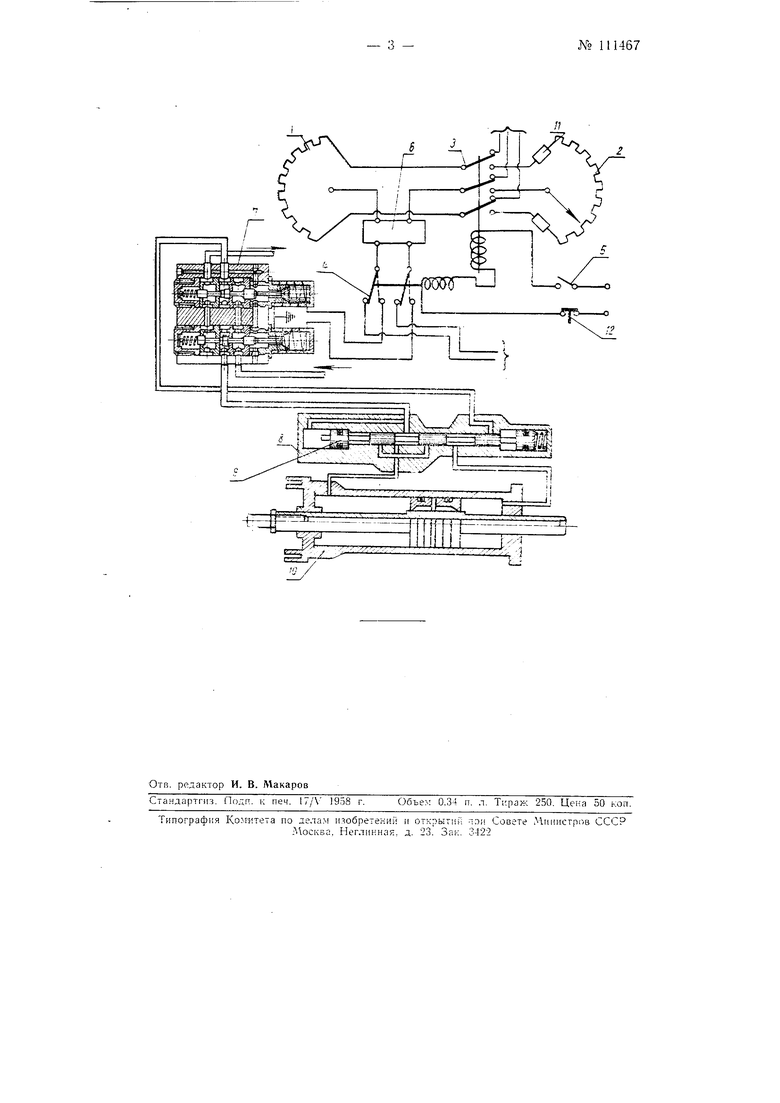
Ка чертеже изображена схема усгройства для управления поворотом передней стойки щасси са голета.
Устройство состоит из потенциометра 1 обратной связи рулевой машинки руля поворота, играющего роль задающего потенциометра; потенциометра 2 обратной связи, установленного на передней ноге; двух реле 3 и 4; тумблера 5; усилителя 6 автопилота; электромапщтного крана 7 с соленоидами; дроссельного клапана 8 с золотником 9; цилиндра управления 10; регулировочных сопротивлений // и выключателя /2.
При включении тумблера ,5 срабатывают реле 3 н 4. Реле 5 отключает от канала курса усил:.1тель 6 автопи.тота и от потенциометра / датчик курсового стабилизатора и подк.тючает к ним потеицнометр 2, а реле 4 отключает от усилителя .тинии управле1Н1я рулевой машинкой руля поворота и подключает к нему линии управления трехпозиционным электромагнитным гидравлическим кpaнo 7.
При движении педалей управления рулем поворота перемещается связаипьп1 с еистемой уп)авлен|1я ползун потенциометра /, в результате чего в диагонали моста появляется сигнал рассогласования, знак которого зависит от направления движения ползуна. Этот сигна.т передается в усилитель 6, на выходе которого появляется усиленный сигна.т того же знака, подаюп111Йся на соответствующий соленоид крана 7. Срабатывание соленоида приводит к подаче масла в соответствуюп ю гидравлическую линию поворота. При появлении давления в лини; поворота золотник 9 дроссельн.ого клапана 8 становится в по.тожение, обеспечивающее проход жидкости к цилиндру управ.чения 10, в результате чего пачннается разворот переднего колеса. При этом перемещается ползун потенциометра 2 обратной связи. Когда ползун повернется на угол ( (К-масщтаб разворота, а - угол поворота ползуна задающего потенциометра), ток рассогласования исчезнет и золотник электромагнитного крана под действие.м пружины станет в исходное по.тоженпе, прп котором .чиния, находивщаяся под давлением, соединится со с.чивом. Прн этом раз.ворот ногп прекратится и золотник дроссельного клапана встанет в положение, прп котором сиобпенпе между но.юстями цилиндра возможно только через дроссель (peжп демпфироваипя).
Регулироваипе масщтаба развсрота и центрирование спстелиз м:1гут быть произведены при помопш )е:улировочных согфотпилений 1.
Для исключения возможности взлета с включенным уп 5авлением разворота колеса в цепи питания lieреключающих реле может быть установлен концевой выключатель /2, размыкающий цешз при переводе секторов управления двигателями в положение «.максимальный газ. CIK:циальпое стопорящее устройство оставляет концевой вык,тючатель в разомкнутом состоянии и при отводе сектора газа назад. Для последующего включения системы управлепия разворотом необходимо нажать на кнопку, расстопоривающую концевой выключатель.
П :) е д м е т и з о б ) е т е и li я
Устройство для управления поворотом передней стойки щасси салюлета с .1ическим приводо.м, состоянием из силового ци.тиндра, ссьювного распределптельпого зо.тотника н всло.могательного зо.чотнпкп с электро.магнитным управлением, о т л и ч а ю п, е е с я те.м, что, с целью упрощения констр)кцпи, облегчения ее веса п осуществления поворота передней стойки от обычной систе.мы ножного управления самолетом, гидравличе:; 1 Й привод снабжен эле1чтромехап;1ческой с.тедящей системой, вьпю.чнегн-юй iro лгэстовой схе.ме, состояп1ей из двух потещдиомет;)о.з и усилителя, включенного в диагональ .моста, причем в качестве зад;лсщего потенциометра следяпдей системы при.менеп нотепциометр обратной связи рулевой руля по.во;)ота с соответств опи:.м каналом уеилите.чя автопи.юта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом передней стойки шасси самолета | 1957 |
|
SU109906A1 |
| Автоматический стабилизатор курса судов | 1959 |
|
SU126383A1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ВСЕМИ КОЛЁСАМИ ТРАКТОРА | 2013 |
|
RU2545157C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТОМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1976 |
|
SU575838A1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА КОЛЁС И ПОЛУРАМ ТРАКТОРА | 2015 |
|
RU2590762C2 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |