Изобретение относится к авиационной технике, в частности к конструкции шасси, и может быть использовано для управления разворотом передней стойки при движении летательного аппарата по аэродрому на любых режимах.
Известны системы управления разворотом передней стойки шасси на самолетах, в которых разворот стойки обеспечивается с помощью штурвальчика или от ножных педалей.
Известна также система управления разворотом передней стойки самолета, содержащая агрегат управления, связанный гидравлически с рулевым цилиндром, педали управления направлением, связанные через механизм пересиливания с штурвальчиком рулежного управления тросовой проводкой, которая через пороговый механизм идет на поворотный хомут стойки и выполняет роль следящей системы [2]
Указанные системы управления разворотом передней стойки шасси самолета обладают следующими недостатками:
наличием сложного и тяжелого механизма;
появлением дополнительного усилия от механизма управления рулем направления при скорости движения стойки меньшей, чем скорость движения педалей управления рулем направления.
Целью изобретения является улучшение эксплуатационных характеристик системы.
Поставленная цель достигается тем, что в механическую систему включен рычаг управления и упругая тяга, а в механическую систему обратной связи включен рычаг обратной связи, причем рычаг управления снабжен упором, взаимодействующим с вырезом рычага обратной связи таким образом, что при полностью повернутой стойке между упором и вырезом рычагов сохраняется зазор.
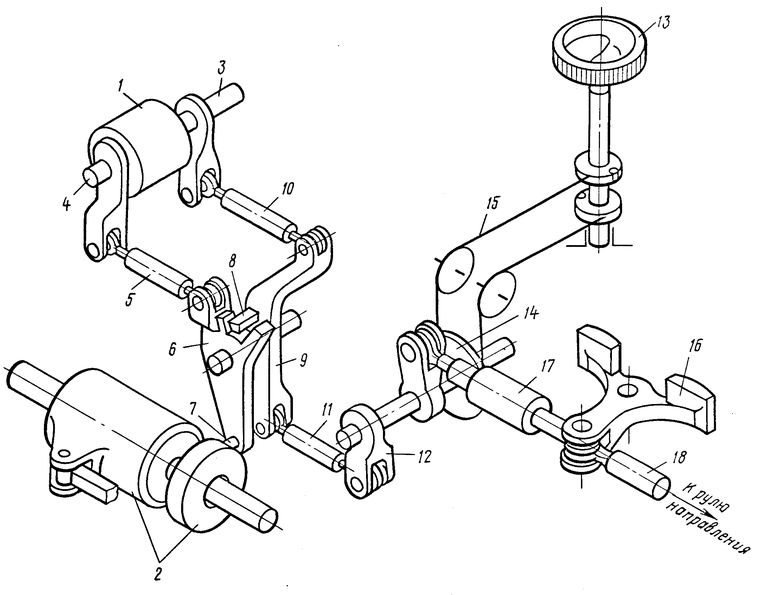
На чертеже показана система управления разворотом передней стойки шасси.
Система содержит агрегат управления 1, который гидравлически связан с полостями рулевого цилиндра 2 и имеет два выхода, вал управления 3 и вал обратной связи 4. Вал обратной связи 4 через тягу 5 связан с рычагом обратной связи 6, имеющим палец 7, который входит в кольцевую проточку рулевого цилиндра 2. Рычаг обратной связи 6 имеет паз, в котором находится выступ 8 рычага управления 9, причем величина выступа 8 и паза в рычаге 6 выбрана такой, что рычаг 6 имеет возможность развернуться относительно рычага 9 на угол, величина которого соответствует углу разворота стойки и посадки.
Рычаг управления 9 через тягу 10 кинематически связан с валом управления 3 с одной стороны, а через тягу 11 и рычаг 12 с проводкой управления от штурвальчика 13 рулевого управления, которая состоит из барабана 14 и тросовой проводки 15, причем все они жестко закреплены на одной оси.
Педали 16 управления рулем направления связаны с проводкой управления от штурвальчика 13 через пружинную тягу 17 и с управлением рулем направления через жесткую тягу 18.
Система управления разворотом передней стойки шасси работает следующим образом.
При нажатии на одну из педалей 16 управления рулем направления сигнал через пружинную тягу 17, которая работает как жесткая, рычаг 12, тягу 11, рычаг управления 9 и тягу 10 поступает на вал управления 3 агрегата управления 1. При этом одна полость рулевого цилиндра 2 соединяется со сливом, а в другую подается давление, и цилиндр, перемещаясь, разворачивает стойку. Разворот продолжается до тех пор, пока вал обратной связи 4 через тягу 5 и рычаг обратной связи 6 не отработает величину рассогласования. Тогда разворот прекращается, и стойка занимает положение, соответствующее углу разворота управляющего органа-педали.
При управлении от штурвальчика 13 сигнал через тросовую проводку 5, барабан 14, рычаг 12 и тягу 11 поступает на рычаг управления 9, а затем через тягу 10 на вал управления 3 агрегата управления 1, при этом пружинная тяга работает как эластичная связь. Pазворот стойки осуществляется аналогично управлению от педалей, только при угле разворота большем, чем при управлении от педалей, скорость поворота штурвальчика 13 будет ограничена скоростью стойки, благодаря наличию в рычаге управления 9 выступа 8, который будет лежать на упоре рычага обратной связи 6, и штурвальчик будет как бы связан со стойкой, т.е. через штурвальчик чувствуется движение стойки.
Предлагаемая система позволяет улучшить эксплуатационные характеристики и упростить систему управления разворотом передней стойки шасси летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 2009 |
|
RU2395428C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ПЕРЕДНЕЙ ОПОРЫ САМОЛЕТА | 1994 |
|
RU2086472C1 |
| НАПОЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ И РУЛЕМ НАПРАВЛЕНИЯ | 2013 |
|
RU2592967C1 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| СПОРТИВНО-ПИЛОТАЖНЫЙ САМОЛЕТ | 1992 |
|
RU2005662C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТОМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая педали управления направлением, штурвальчик управления передней стойки, тросовую проводку, агрегат управления приводом поворота стойки, механическую систему, соединяющую педали и штурвальчик с агрегатом управления и приводом, устройство блокировки поворота передней стойки и привод стойки, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик, в механическую систему включен рычаг управления и упругая тяга, а в механическую систему обратной связи включен рычаг обратной связи, причем рычаг управления снабжен упором, взаимодействующим с вырезом рычага обратной связи таким образом, что при полностью повернутой стойке между упором и вырезом рычагов сохраняется зазор.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| "Дуглас", 1971. | |||
