Известные автоматические стабилизаторы курса судов, работающие от магнитного компаса с электролитическим преобразователем-датчиком курса, необходимо отключать, когда требуется временно изменить курс судна, например при расхождении со встречными судами, и затем вручную приводить судно на заданный курс,
В описываемом изобретении этот недостаток устранен тем, что стабилизатор курса выполнен с двумя последовательно соединенными самобалансирующимися мостами сопротивления, суммирующими сигналы датчика курса и датчика обратной связи и позволяющими изменять курс судна путем изменения величины сопротивления в одном из плеч моста с помощью рукоятки ручного управления на пульте авторулевого. При этом после возвращения рукоятки в нулевое положение авторулевой автоматически выводит судно на прежний заданный курс.
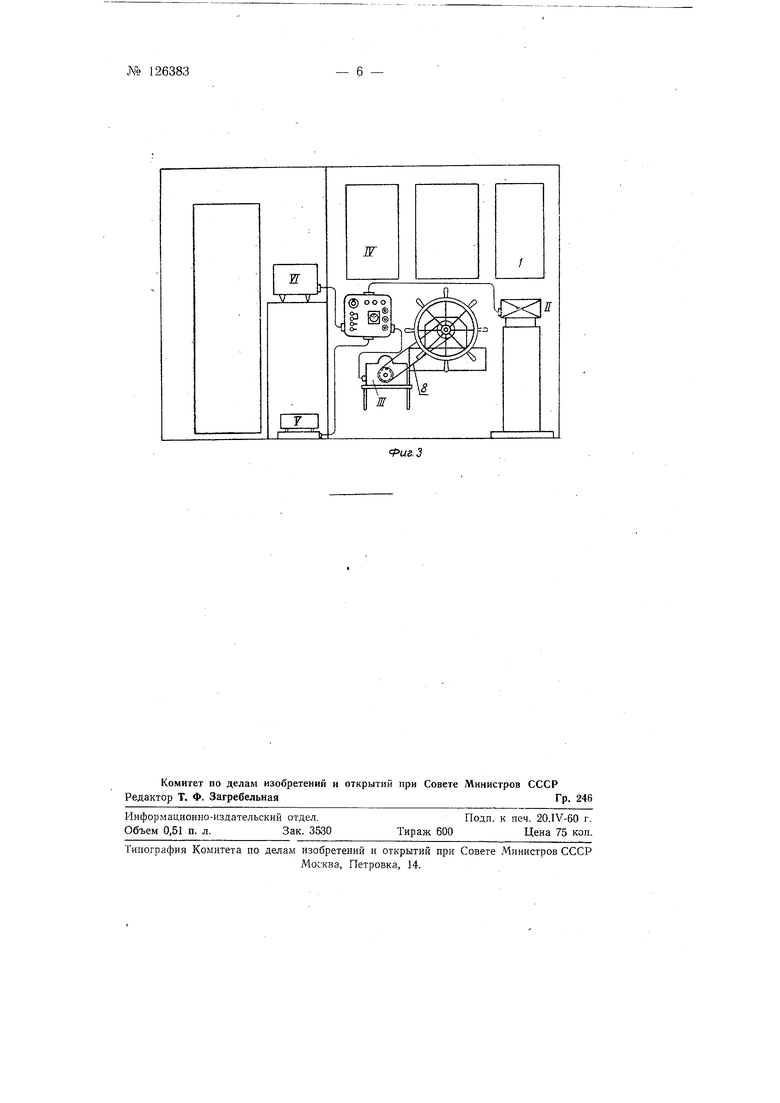
На фиг. 1 изображен датчик курса, в разрезе; на фиг. 2 - принципиальная электрическая схема автоматического стабилизатора курса; на фиг. 3 - схема расположения приборов стабилизатора курса в рулевой рубке.
В комплект автоматического стабилизатора курса входят: датчик курса I, электронный усилитель //, рулевая мащинка ///, пульт управления IV, преобразователь / и электронный усилитель VI.
Датчик курса / может быть изготовлен на базе обычного магнитного компаса, в латунном котелке / которого помещен внутренний котелок 2, сделанный из электроизоляционного материала.
Котелок 2 заполнен токопроводящей жидкостью, состоящей из смеси дистиллированной воды, спирта и глицерина. Внутри него помещена на щпильке 3 картущка 4 с укрепленными на ней двумя серебряными экранами. Эти экраны составляют с четырьмя неподвижными электродами 5, закрепленными во внутреннем котелке 2, мостовую электрическую схему датчика курса. Внутренний котелок 2 может свободно повораAfb 126383. чиваться в наружном. Для обеспечения питания и снятия сигнала c.;iyжат, TOKO съемные кольца 6 и щетки 7, размещенные в нижней части внутреннего котелка 2. Такое устройство позволяет производить начальную балансировку мостовой схемы датчика курса перед включением стабилизатора на любом курсе судна, а также изменять курс судна при включенном стабилизаторе.
Электронный усилитель // стабилизатора курса предназначен дли усиления сигнала переменного тока от датчика курса и для преобразо-вания его в управляющие импульсы. Он состоит из трех каскадов. ПерВ1з й каскад служит для усиления сигнала, второй - для преобразования усиленного сигнала в управляющие импульсы, третий каскад является фазочувствительным усилителем-выпрямителем. Выпрямленный и усиленный сигнал поступает на электромагнитные реле, управляющие работой рулевой машинки.
Устройство усилителя обеспечивает необходимую характеристику регулирования, при которой определенному углу отклонения судна от курса соответствует опреде тенный угол отклонения руля. Скорость перскладки руля в момент подхода его к среднему положению плавно снижается. Все параметры и временные соотнощения подбираются таким образом, чтобы обеспечить качественную работу системы автоматического регулирования такого объекта, каким является малотоннажное судно..
Рулевая машинка /// соединена цепной передачей 8 с осью щтурвала. В корпусе рулевой маш.инки помещены два малогабаритных реле, выполняющих роль ограничителей кладки руля. Так как ось рулево машинки механически жестко связана с баллером руля, то потенциометрический датчик обратной связи установлен не на кормЪ, как обычно, а на корпусе рулевой машинки и соединен механической передачей с ее осью. Это позволяет существенно упростить монтаж стабилизатора курса на судне.
С помощью пульта управления IV осуществляется включение и выключение стабилизатора курса, контроль за его работой и регулирование системы. На лицевой стороне пульта расположены три переключателя, три сигнальные лампочки, три регулятора, рукоятка ручного управления судном, два предохр.анителя и вольтметр, При включении верхнего переключателя (главного) начинает работать электродвигатель рулевой машинки и загорается желтая лампочка. Средний однополюсный переключатель служит для включения преобразователя и нитей накала ламп, а нижний однополюсный переключатель - для перехода с ручного управления на автоматическое. Вольтметр позволяет контролировать напряжение переменного тока, идушее от преобразователя, и поддерживать его с помощью реостата на постоянном уровне. Кроме того, на пульте имеется рукоятка, позволяютцая менять курс судна вручную при включенном стабилизаторе. С помошью регуляторов плавно менять величину чувствительности схемы, угол кладки руля и степень компенсации постоянного дрейфа.
Преобразователь V включается в судовую сеть постоянного тока напряжением 24 0- и вырабатывает ток напряжением 17 е и частотой 125 гц, идущий на питание усилителя VI и датчика курса /.
Принцип действия автоматического стабилизатора курса основан ня измерении величины отклонения диаметральной плоскости судна от направления, задаваемого магнитным датчиком курса, и на преобразовании измеренной величийы отклонения в-пропорциональный по величине угол кладки руля.
В рассматриваемом стабилизаторе измерение отклонения производится магнитным компасом с жидкостным потенциометрическим съемом угла. Четыре подвижных контакта с двумя экранами на картушке образуют схему моста, питаемую переменным током. Следовательно, любое отклонение судна от заданного курса вызовет перемещение неподвижных электродов относительно картушки, что, в свою очередь, приведет к появлению в диагонали моста пропорционального по величине напряжения с фазой, зависящей от стороны отклонения судна. Потенциометры ручного управления и обратной связи образуют второй мост, питание которого также производится переменным током. Обе мостовые схемы соединены Последовательно по своим диагоналям и подключены на вход электронного усилителя, управляющего работой рулевой машинки. Очевидно, что на вход усилителя будет поступать алгебраическая сумма напряжений разбаланса этих двух мостов. Следовательно, рулевая машиика будет срабатывать как от сигнала с датчика курса при уходе с курса, так и при повороте рукоятки ручного управления на пульте.
Подбором сопротивлений плеч моста можно установить определенную пропорциональность между величиной отклонения от курса и величиной перекладки руля.
Ф - угол ухода судна с курса,
б - угол кладки руля,
К - - коэффициент обратной связи.
Для малых судов величина коэффициента обратной связи находится в пределах /(1 Ч- 3.
Правильное размещение приборов электронного автоматического стабилизатора курса на судне имеет большое значение для нормальной его работы. При этом необходимо:
а)исключить влияние переменных магнитных полей на датчик куроа и уничтожить креповую девиацию. Для этого отдельные приборы комплекта устанавливаются на расстоянии не менее 1 м от датчика курса, а сам датчик курса -помещается в нактоузе магнитного компаса Е-место обычного котелка;
б)обеспечить свободный доступ к пульту управления для визуального наблюдения за работой авторулевого и включения и выключения его в наиболее короткий промежуток времени. Для выполнения этого требования пульт управления должен быть установлен рядом с постом управления так, чтобы рулевой мог оперировать с ним, не отходя от штурвала;
в)установить рулевую мащинку вблизи от штурвала так, чтобы ось ее была параллельна оси штурвала. Меладсевое расстояние не должно превышать 1 м. Рулевая машинка должна жестко крепиться к основанию во избежание вибрации пд)и ее работе. Усилитель можно устанавливать в любом месте рулевой рубки. Умформер желательно вынести из рулевой рубки, чтобы исключить излишний шум. Приборы стабилизатора соединяются с помощью резинового гибкого кабеля марки РГМ и штепсельных разъемов типа ПР. Монтаж прибора занимает несколько часов и не требует вывода судна из эксплуатации. После установки прибора на судне производятся необходимые регулировки. При первой регулировке с помощью смены звездочек цепной передачи от рулевой машинки к штурвалу подбирается необходимая для данного судна скорость перекладки руля. Вторая регулировка заключается в подборе сопротивлений в цепи потенциометра обратной связи для установления необходимого коэффициента обратной связи. Величина передаточного
- 3 -№ 12-5SS3
б К(р, где
№ .126383
ОгНошенйя к коэффициента обратной связи определяется в процессе испытаний для каждого конкретного типа судна.
Предмет изобретения
1.Автоматический стабилизатор курса судов с магнитным компасом и электролитическим преобразователем-датчиком курса, отличающийся тем, что, с целью обеспечения управления рулевым устройством судна вручную без отключения стабилизатора курса, он выполнен с двумя последовательно соединенными самобалансирующимися мостами сопротивления, суммирующими сигналы датчика курса и датчика обратной связи.
2.Автоматический стабилизатор курса судов по п. 1, отличающийся тем, что, с целью улучщения обслуживания, упрощения и снижения трудоемкости монтажа стабилизатора на судне, датчик обратной связи стабилизатора установлен в рулевой рубке судна и механически связан с рулевой машинкой, а рулевой штурвал соединен с электродвигателем фрикционной муфтой.
Фиг. I
Фиг. г

| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор курса речных судов | 1974 |
|
SU525059A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Стабилизатор "нева" курса речных судов | 1976 |
|
SU615456A1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| Стабилизатор курса речных судов | 1972 |
|
SU449853A1 |