Изобретение относится к радионавигации и может использоваться в качестве измерителя скорости и высоты полета летательных аппаратов.
Известен допплеровский измеритель скорости и высоты полета, содержзщи последовательно соединенные генератор модулирующего напряжения, передатчик частотно-модулированного колебания и передающую антенну, последовательно соединенные приемную антенну, приемник, первый фа.зрвый детектор, интегратор и регистратор скорости, последовательно соединенные второй фазовый детектор, фильтр нижних частот и регистратор высоты, а также управляемый генератор, выход которого соединен с опорным входом первого фазового детектора, и управляемый фазовраща«оДтель, причем выход генератора модулируюСЛщего напряжения соединен через
ся управляемый фазовращатель с опорным
С0 OS входом второго фазового детектора, а выход фильтра нижних частот соединен с управляющим входом управляемого фазовращателя, при этом передающая и приемная антенны направлены под постоянным углом к подстилающей поверхности.
Однако известный измеритель имеет недостаточную точность измерения скорости и высоты полета носителя.
Цель изобретения - повышение точности измерения скорости и высоты полета
носителя.
Для этого в допплеровский измеритель скорости и высоты полета, содержащий последовательно соединенные генератор модулирующего напряжения, передатчик частотно-модулированного колебания и передающую антенну, последовательно соединенные приемную антенну, приемник, первый фазовый детектор, интегратор и регистратор скорости, последовательно соединенные второй фазовый детектор, фильтр нижних частот и регистратор высоты, а также управляемый генератор, выход которого соединен с опорным входом первого фазового детектора, и управляемый фазовращатель, причем выход генератора модулирующего напряжения соединен через управляемый фазовращатель с опорным входом второго фазового детектора, а выход фильтра нижних частот соединен с управляющим входом управляемого фазовращателя, при -этом передающая и приемная антенны направлены под постоянным углом к подстилающей поверхности, введены фильтр частоты модуляции, масштабирующий усилитель и сумматор, выход первого . фазового детектора соединен через фильтр частоты модуляции с входом второго фазового детектора, выход интегратора соединен через сумм.атор с управляющим входом управляемого генератора, а выход управляемого фазовращателя соединен через масштабирующий усилитель с вторым входом сумматора.
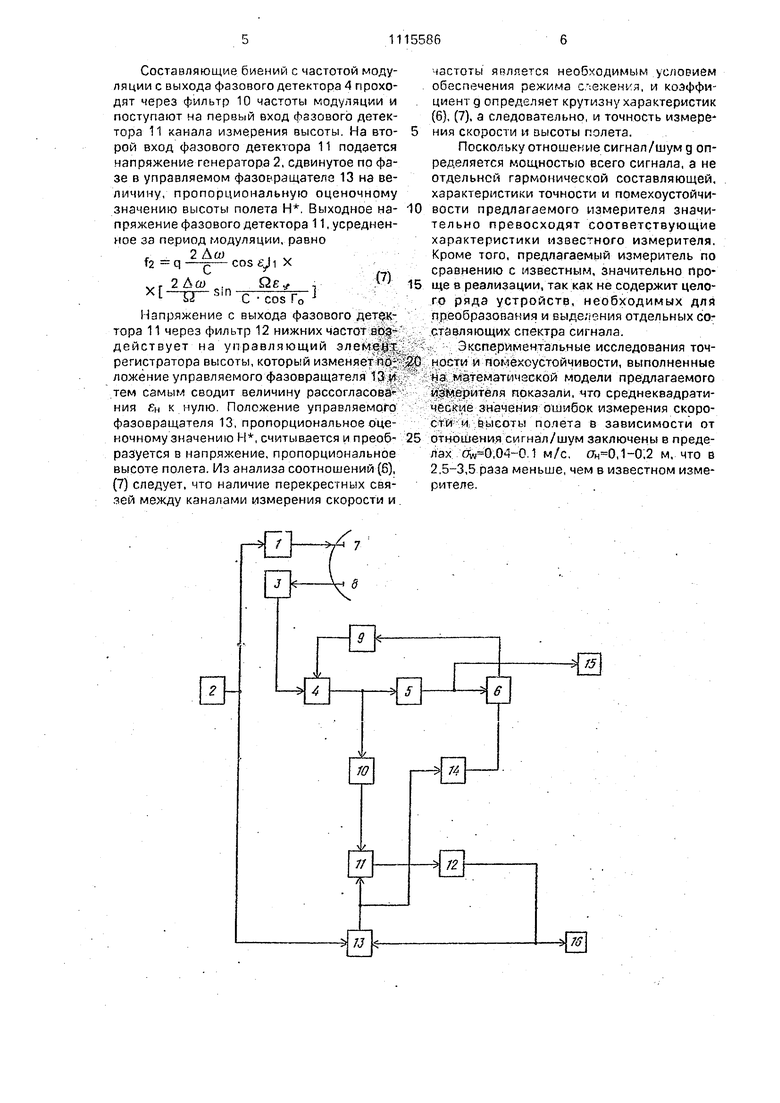
На чертеже представлена структурная электрическая схема измерителя.
Измеритель содержит передатчик 1 ча- стотно-модулированного колебания, генератор 2 модулирующего напряжения, приемник 3,. первый фазовый детектор 4, интегратор 5. сумматор 6, передающую антенну 7, приемную антенну 8, управляемый генератор 9, фильтр 10 частоты модуляции, второй фазовый детектор 11, фильтр 12 нижних частот, управляемый фазовращат.ель-13, масштабирующий усилитель 14, регистратор 15 скорости и регистратор 16 высоты.
Измеритель работает следующим образом.
Передатчик 1 излучает сигнал, промодулированный по частоте сигналом генератора 2 модулирующего напряжения.
ei(t) Ei cds( t -f cos Qt), (1)
где 1% , Aw , Q - известные несущая частота, девиация частоты и частота модуляции.
Отраженный сигнал на выходе приемника 3 имеет вид
l2(t)-E2COS 0npt
2(2)
X cos ( Q t - -7----f- Н ) и С cos Го -
где ftJnp - промежуточная частота; Н - высота полета;
Го - угол установки пуча антенны относительно вертикали:
(р- фаза отраженного сигнала, которая 0 учитывает эффект допплера и равна
(p 0)gt-ry}.(3)
где Шд 2 Wo W/C - допплеровский сдвиг частоты;
W - скорость летательного аппарата 5 (ЛА).в направлении излучения; 1/;-случайная фаза.
Сигнал управляемого генератора 9 промодулйрован по частоте сигналом генератора 2, сдвинутым по фазе в управляемом 0 фазовра,щателе 13 на величину, соответствующую оценочному значению высоты Н попета ЛА, а частота управляемого генератора 9 сдвинута относительно промежуточной на оценочное значение доппперовского 5 с.двига частоты , соответствующего оцеиоч.ному значению скорости попета W.
13 Ез cos Ыпп t + п
2,- И)
Xcos (Qtry-H)+v5
С cos Г
где 1/9 f{JoW t/C.(5)
Сигнал с выхода приемника 3 перемножается с сигналом управляемого генератора 9 в фазовом детекторе 4 канала 5 изменения скорости. Выходное напряжение фазового детектора 4 усредненное за период модуляции, равно
,2 Аи) .. QS
fi q I о -о- sin -f:,(6)
: S I n .
COS Го
.
0 где и ( -ошибки слежения;
- функция Бесселя первого рода п-го порядка;
q - коэффициент, характеризующий от5 ношение мощности сигнала к мощности шумов, поступа.ющих на вход устройства.
Выходное напряжение фазового детектора 4 через интегратор 5, сумматор 6 воздействует на управляющий злемент
0 генератора 9, который подстраивает частоту генератора 9 к частоте выходного сигнала приемника 3, сводя тем самым величину рассогласования е ,/к нулю. При этом на5 пряжение на выходе интегратора 5 пропорционально оценке допплеровского сдвига частоты, которое преобразуется в преобразователе допплеровских частот регистратора 15 скорости в напряжение, пропорциональное оценке скорости W.

| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| Вертолетный радиотехнический комплекс для обнаружения "черного ящика" с сигнализацией самолета, потерпевшего катастрофу | 2016 |
|
RU2627683C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2426143C1 |
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| ВЕРТОЛЁТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2015 |
|
RU2600333C2 |
| ПЕЛЕНГАТОР | 2001 |
|
RU2190235C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2005 |
|
RU2290059C2 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427853C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ВЕЩЕСТВА | 2012 |
|
RU2510015C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2321177C1 |
ДОППЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ И ВЫСОТЫ ПОЛЕТА, содержащий последовательно соединенные генератор модулирующего напряжечия, передатчик частотно модулированного .колебания и передающ/ю антенну, последовательно соединенные приемную антенну, приемник, первый фазовый детектор, интегратор и регистратор скорости, последовательно соединенные второй фазовый детектор, фильтр нижних частот и регистратор высоты, а также управляемый генератор, выход которого соединен с опорным -входом первого фазового детектора, и упрасляемый фазовращатель, причем выход генератора модулирующего напряжения соединен через управляемый фазовращатель с опорным входом втсро.о фазового детектора, а выход фильтра нижних частот соединен с управляющим входом управляемого фазовращателя, при этом передающая и приемная антенны напрзвлены под постояннь м углом к подстилающей поверхности, о т л и ч а ю щ и и с я тем, что, с целью повышения точности измерения скорости и высоты полета носителя, введены фильтр, частоты модуляции, масштабирующий усилитель и сумматор, выход первого фазового детектора соединен через фильтр частоты модуляции с входом второго фазового детектора,выход интегратора соединен через сумматор с управляющим входом управляе.мого генератора, а выход управляемого фасл зовращателясоединенчерез масштабирующий усилитель с вторым вхо- дом сумматора.
| Зарубежная радиоэлектроника, h 11, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
