которого соединен с вторым входом шестого сумматора, два фазовращателя на 90° и второй параметрический усилитель, причем пыход приемника соединен с входами первого и второго ключей, управляющие входы которых соединены соответственно с первым и вторым выходами формирователя импульсоо, выход пятого интегратора соединен с управляющим входом управляемого фазовращателя, выход которого соединен через первый фазовращатель на 90° с опорным входом первого фазового детектора, выход фазовращателя на 180 соединен через второй фазовращатель на 90° с опорным входом второго фазового детектора и выход третьего интегратора соединен через второй параметрический усилитель с вторым входом седьмого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| Цифровой фазометр | 1982 |
|
SU1061062A1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
| РАДИОЛОКАЦИОННОЕ ПРИЕМНОЕ УСТРОЙСТВО | 1984 |
|
SU1841013A1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2426143C1 |
| Устройство пространственно-временной обработки импульсных сигналов | 1977 |
|
SU708272A1 |
.СИСТЕМА ИЗМЕРЕНИЯ АЗИМУТА ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО РАДИОМАЯКА, содержащая наземный радиомаяк, содержащий последовательно соединительные шифратор сигналов, передающее устройство и вращающуюся направленную антенну с двухлепестковой диаграммой направленности, выход сигнала Север, который соединен с шифратора сигналов. и ненаправленную антенну, вход которой соединен с вторым выходом передающего устройства и бортовое приемно-измерительное устройство, содержащее последовательно соединенные антенну, приемник, первый синхронный детектор, первый временной различитель, первый сумматор, первый усилитель, первый интегратор, второй сумматор, второй интегратор, первый масштабирующий усилитель и формирователь импульсов, последовательно соединенные второй синхронный детектор и второй временной различитель. включенные между выходом приемника и вторым входом первого сумматора, формирователь селектирующих импульсов, первый и второй входы которого соединены с соответствующими выходами формирователя импульсов, а первый и второй выходы соединены со стробирующими входами первого и второго временных различителей, последовательно соединенные генератор опорных колебаний, управляемь1й фазовращатель и фазовращатель на 180°. последовательно соединенные первый блок вычитания, второй усилитель, третий сумматор, третий интегратор, второй блок вычитания и второй масштабирующий усилитель, выход которого соединен с вычитающим входом первого блока вычитания, последоват1эльно соединенные третий усилитель, четвертый сумматор и четвертый интегратор, включенные между выходом первого блока вычитания и первым вычитающим входом второго блока вычитания, последовательно соединенные четвертый усилитель, пятый сумматор и фильтр нижних частот, включенные между выходом первого блока вычитания и вторым вычитающим входом второгоблока вычитания, третий, четвертый и пятьгй масштабирующие усилители, включенные между выходом пер вого сумматора и вторыми входами соответственно третьего, четвёртого и пятого сумматоров, и первый параметрический усилитель, включенный между выходом третьего интегратора и вторым входом второго сумматора, причем выходы управляемого фазовращателя и фазовращателя на 180° соединены с опорными входами соответственно первого и второго синхронных детекторов, при этом суммирующий вход первого блока вычитания является входом сигнала воздушной скорости летательного аппарата и виход второго интегратора является выходом сигнала азимута летательного аппарата, отличающаяся тем, что, с целью повышения точности, введены последовательно соединенные первый ключ, фазовый детектор, шестой сумматор, пятый усилитель, седьмой сумматор и пятый интег.ратор, последовательно соединенные второй ключ и второй фазовый детектор, выход
Изобретение относится к радиотехнике и может использоваться в азимутальном канале радиотехнических систем ближней навигации,
Цель изобретения - повышение точности,
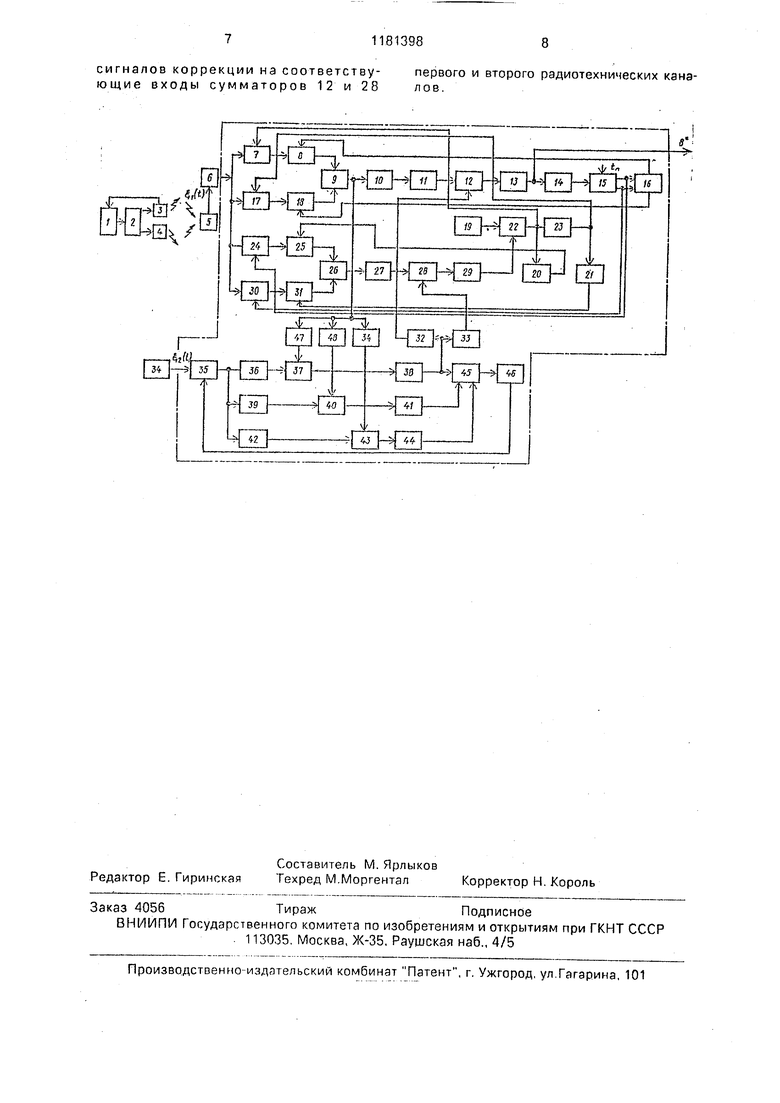
На чертеже представлена структурная электрическая схема предложенной системы.
Система содержит радиомаяк, включающий шифратор 1 сигналов, передающее устройство 2, вращающуюся антенну 3 с двухлепестковой диаграммой направленно-, сти и ненаправленную антенну 4, бортовое приемно-измерительное устройство, включающее антенну 5, приемник б, первый синхронный детектор 7, первый временной различитель 8, первый сумматор 9, первый усилитель 10, первый интегратор 11, второй сумматор 12, второй интегратор 13, первый масштабный усилитель- 14, формулирователь 15 импульсов, формирователь 16 селектирующих импульсов, второй синхронный детектор 17, второй временной различитель 18, генератор 19 опорного сигнала, фазовращатели 20 и 21 на 90, управляемый фазовращатель 22, фазовращатель 23 на 180°, первый ключ 24, первый фазовый детектор 25, шестой сумматор 26, пятый усилитель 27, седьмой сумматор 28, пятый интегратор 29, второй ключ 30, второй фазовый детектор 31, параметрические усилители 32 и-33, пятый масштабирующий усилитель 34. первый блок 35 вычитания, второй усилитель 36, третий сумматор 37, третий интегратор 38, третий усилитель 39, четвертый сумматор 40. четвертый интегратор 41, четвертый усилитель 42, пятый сумматор 43, фильтр 44 нижних частот, второй блок 45 вычитания, второй масштабирующий усилитель 46, третий масштабирующий усилитель 47с и четвертый масштабирующий усилитель 48.
Система работает следующим образом.
Канал непрерывного излучения передающего устройства 2 нагружен на вращающуюся антенну 3, которая имеет двухлепестковую диаграмму направленности (ДН) в горизонтальной плоскости, вращающуюся со скоростью 100 об/мин. Летательные аппараты (ЛА), находящиеся в зоне действия системы под разными азимутами,
облучаются последовательно в разные моменты времени. Благодаря двухлепестковой форме ДН вращающейся антенны, в момент облучения ЛА на выходе антенны 5 выделяется азимутальный радиосигнал i(t).
Для передачи опорного сигнала в северный момент времени используются серии опорных импульсов 35, 36, которые, как указывалось выше, вырабатываются с помощью специальных датчиков и поступают
в шифратор 1., а затем - в импульсный канал передающего устройства 2, нагруженного на ненаправленную антенну 4. Излученные ненаправленной антенной 4 опорные радиоимпульсы серий 35, 36 принимаются
на борту ЛА и декодируются в приемнике 6. Импульс северного совпадения, временное tn положение которого является началом отсчета азимтума, формируется в бортовом приемнике схемой совпадения.
Импульс северного совпадения также используется для запуска формирователя 15 импульсов. Из приемника 6 после преобразования и усиления азимутальный сигнал поступает на входы синхронных детекторов
7, 17, а другие входы которых соответственно поступают сигналы с выхода генератора 19 опорного сигнала через управляемый фазовращатель 22 и фазовращатель 23, осуществляющего поворот фазы опорного
сигнала на п. Выходные напряжения синхронных детекторов 7 и 17 в виде видеоимпульсов, попадаются на временные различители 8 и 18, на которые также с выхода формирователя 16 поступают следящие импульсы, соответствующие ранним и поздним стробам. Временные различители 8 и 18 формируют напряжения, характеризующие отклонения осей видеоимпульсов относительно осей симметрии соответстзующих стробов. С выхода сумматора 9 снимается результирующий сигнал ошибки, характеризующий отклонение оси симметрии азимутального видеосигнала от соотоетстоующёй оси симметрии следящих стробов, и через усилитель 10 подается на вход первого интегратора 11 выходное напряжение которого пропорционально скорости изменения азимута ЛА. Напряжение с выхода первого интегратора 11 подается на первый вход второго сумматора 12, на второй вход которого через первый параметрический усилитель 32 подается напряжение с выхода интегратора 38 нерадиотехнического канала, пропорциональное путевой скорости полета Л А. Напряжение с выхода второго сумматора 12 подается на вход второго интегратора 13, с выхода которого снимается напряжение, пропорциональное измеренному азимуту ЛА. Напряжение с выхода второго интегратора 13 подается на. вход масштабирующего усилителя 14, выходное напряжение которого характеризует временное te положение оси симметрии азимутального сигнала. Напряжение с выхода масштабирующегр усилителя 14 воздействует на формирователь 15 импульсов, в котором осуществляется формирование двух импульсов, временное te положение оси симметрии которых соответствует ожидаемой оси симметрии азимутального радиосигнала. При этом введение с нерадиотехнического канала через параметрический усилитель, выходноенапряжение которого пропорционально скорости изменения азимута, указанного выше сигнала коррекции позволяет наиболее точно определить временное to положение ожидаемой оси симметрии азимутального радиосигнала. Это особенно важно при случайных пропаданиях азимутальных радиосигналов, а также .при наличии переотраженных от местных предметов азимутальных сигналов, что является характерным для систем такого класса. Выходные импульсы формирователя 15 импульсов подаются на формирователь 16, в котором осуществляется формирование соответствующих ранних и поздних стробов. Кроме того, выходными импульсами формирователя 16 стробируется второй нерадиотехнический канал, для чего они подаются на вторые входы ключей 24, 30, на первые выходы которых поступает с выхода бортового приемника б азимутальный радиосигнал. Азимутальный сигнал с выходов ключей 24 и 30 подается на первые входы соответствующих фазовых детекторов 25 и 31, на другие входы которых подаются опорные сигналы с выходом фазовращателей 20 и 21, осуществляющих поворот фазы на л:/2 сигналов, снимаемых с выходов управляемого фазовращателя 22 и фазовращателя 23. Вь1ходные-напряжения фазовых детекторов 25 и 31, величины которых определяются фазовым рассогласованием межд,у сигналами, поступающими на них, подаются на соответствующие входы сумматора 26, а выходное напряжение последнего через усилитель 27 подается на первый вход сумматора 28. На второй вход сумматора 28 через второй параметрический усилитель 33 с выхода интегратора 38 нерадиотехнического канала подается напряжение, пропорциональное путевой скорости полета ЛА, что позволяет учесть изменение частоты принимаемого радиосигнала, обусловленное аффектом Доплера, и наиболее точно
осуществить подстройку опорного генератора и, тем самым, повысить помехоустойчивость и точность измерения азимута. Напряжение с выхода сумматора 28 подается на вход интегратора 29, выходным напряжением которого, пропорциональным фазе принимаемого сигнала, через управляющий элемент в управляемом фазовращателе 22 осуществляется фазовая подстройка опорного сигнала, вырабатываемого генератором 19. Тем самым устраняется фазовое рассогласование между сигналами поступающими на синхронные 7, 17 и фазовые детекторы 25, 31.
На первый вход блока 35 вычитания поступает с выхода канала скорости сигнал 2{t), содержащий информацию о путевой скорости Л А, хотя и с ошибками, обусловленными наличием зетра и собственными
ошибками канала скорости. На второй вход блока 35 вычитания поступает сигнал с выхода масштабирующего усилителя 46. Сигнал ошибки с выхода блока 35 вычитания, пропорциональный разности между наблюдаемым сигналом 2{t) и опорным сигналом при заданном e2(t), через усилители 36, 39, 42 нерадиотехнического канала поступает на один из входов сумматоров 37, 40 и 43, на другие входы которых с выхода сумматора 9 первого радиотехнического канала подается корректирующий сигнал с весами, соответственно равным коэффициентам усиления масштабирующих усилителей 47, 48, 49. Сигналы с выходов сумматоров 37,
40, 43 через интеграторы 38, 41 и фильтр 44 поступают на соответствующие входы блока 45 вычитания, выходной сигнал которого после масштабирования в .масштабирующем усилителе 46 подается а качестве опорного
сигнала на второй вход блока 35 вычитания. Выходной сигнал с выхода интегратора 38, пропорциональный путевой скорости полета ЛА, через соответствующие параметрические усилители 33 и 32 подается в виде
сигналов коррекции на соответствующие входы сумматоров 12 и 28
первого и второго радиотехнических каналов.
Л
7 --. а
- ж
vTj
В;
17 - /г
25
2-
, Ф
Т1
Ст
30
J/
У
; Г2
10 -5 И
-2Г
г
- 27 --3. га
29
-1 У . ТТЗ-.
J
4zft
35
Г- 56
3
.J
I-545
| Сосновский А | |||
| А., Хаймович И | |||
| А | |||
| Радиотехнические средства ближней навигации и посадки летательных аппаратов | |||
| Машиностроение | |||
| -М., 1975, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Макаров К | |||
| В | |||
| и др | |||
| Радионавигационные системы аэропортов | |||
| Транспорт, - М., 1978 | |||
| с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
