;о
со
Изобретение относится к геофизи- ческому приборостроению, в частности к сейсмографам.
Цель изобретения - снижение минимального уровня регистрируемых сигналов путем компенсации помех-наклонов
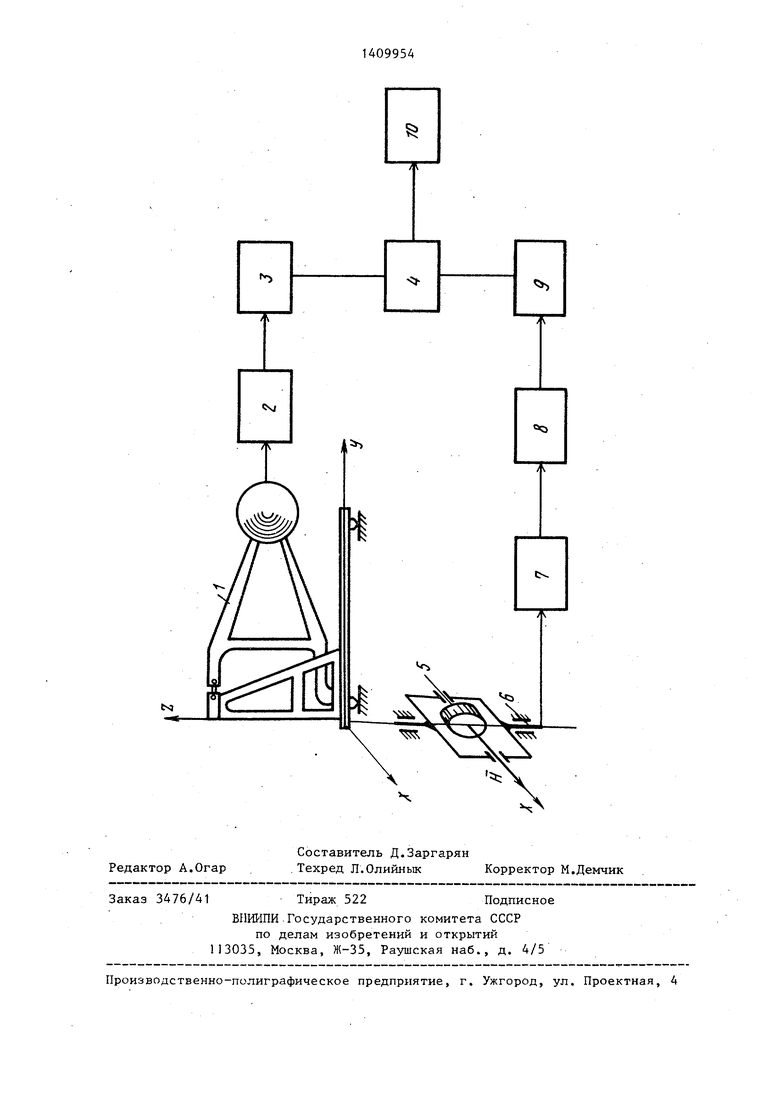
На чертеже представлена блок-схема предлагаемого сейсмографа.
Сейсмограф 1 снабжен магнитоэлектрическим преобразователем 2, выход которого подключен через усилитель 3 к сумматору 4. Двухстепенный гироскоп 5 на упругих опорах (подвесах 6 снабжен параметрическим преобразо- вателем 7, выход которого подсоединен через усилитель 8 и фильтр 9 низких частот к второму входу сумматора 4. Выход сумматора 4 подключен к входу регистратора 10.
Сейсмограф работает следующим образом.
Пусть основание сейсмометра 1 связано с прямоугольной системой координат XYZj причем ось OZ параллельна оси маятника, ось OY лежит в плоскости качаний маятника, а ось ОХ перпендикулярна к плоскости чертежа. При линейных смещениях почвы X вдоль оси ОХ и повороте основания вокруг оси OY на угол р под действием наклона на маятник сейсмометра 1 действуют два момента: инерционньш момент MR(,x и момент силы тяжести MRggsin/5, где MR,, - статический момент маятника, Мр- масса маятника, RQ расстояние от оси вращения до центра тяжести, g - ускорение силы тяжести. Под действием этих моментов маятник поворачивается вокруг своей оси. За пределами периода собственных колебаний маятника Т g угол поворота пропорционален ускорениям ;движения почвы х и углу р. При этом под действием наклона ft маятника он
:поворачивается на угол
0
Кп
/5,
:Где 1е приведенная длина маятника, Шс - круговая частота собственных колебаний маятника. На выходе магни- тоэлектрического преобразователя 2 появляется .напряжение U; , пропорциональное третьей производной смеще- Йия почвы х и угловой скорости I J . Пусть ось кинетического, момента ги- роскопа 5 направлена параллельно оси ОХ. Тогда в результате наклона на 5/гол л вокруг оси OY появл яется гиро- 1-копический момент Г К jb , где
0
0
j
5
0
Н - кинетический момент гироскопа. Под действием гироскопического момента Г гироскоп поворачивается вокруг оси OZ на угол ч , пропорциональный угловой скорости л и равньй
Н .
1 - fb , где С - жесткость упругих подвесов. На выходе параметри ческого преобразователя 7 появляется напряжение U-, пропорциональное угловой скорости. Оба напряжения V- f +ft и Ш усиливаются усилителями 3 и 8 до величин и подаются на сумматор 4. При этом коэффициенты К. и К рассчитываются таким образом, чтобы после вычитания на сумматоре 4 составляющая полного напряжения .:, пропорциональная , полностью компенсировалась напряжением U,j. Тогда на выходе сумматора 4 остается только составляющая напряжения, пропорциональная х , которая записывается на регистраторе 10. Если после усилителя 8 подключить фильтр 9 низких частот второго порядка с постоянной времени f , выбранной из условия
TS
ф т частотные характеристики обоих каналов - и сейсмометра, и гироскопа - во углу наклона /3 будут одинаковы во всем частотном диапазоне.
35 Формула изобретения
0
5
0
.
Сейсмограф, содержащий сейсмопри- емник с магнитоэлектрическим преобразователем, двухстепенной гироскоп с параметрическим преобразователем и регистратор, отличающи.й- с я тем, что, с целью снижения минимального уровня регистрируемых сигналов путем компенсации помех-наклонов, в него введены два усилителя с регулируемыми коэффициентами усиления, фильтр нижних частот и сумматор, а гироскоп снабжен упругим подвесом, при этом выход магнитоэлектрического преобразователя сейсмоприемника через первый усилитель с регулируемым коэффициентом усиления соединен с первым входом сумматора, к второму входу которого через второй усилитель с регулируемым .коэффициентом усиления и фильтр нижних частот подключен выход параметрического преобразователя гироскопа, а выход сумматора соединен с регистратором.
Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОГРАФ ДЛЯ РЕГИСТРАЦИИ ЗЕМЛЕТРЯСЕНИЙ | 1967 |
|
SU195146A1 |
| Сейсмометр | 1987 |
|
SU1436084A1 |
| Способ выделения инструментальных шумов сейсмографа | 1987 |
|
SU1441341A1 |
| Электронный сейсмометр | 1987 |
|
SU1518816A1 |
| Длиннопериодный вертикальный сейсмометр | 1982 |
|
SU1094002A1 |
| Устройство оперативной калибровки сейсмических каналов | 1987 |
|
SU1509770A1 |
| Гиросейсмометр | 1973 |
|
SU490056A1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
Изобретение относится к области геофизического приборостроения, в частности к сейсмографам. Цель изобретения - снижение минимального уровня регистрируемых сигналов за счет компенсации действия помех-наклонов. Подключение преобразователей сейсмо- приемника и гироскопа к сумматору позволяет регистрировать сейсмические явления с большими увеличениями. При этом за счет регулировки коэффициентов усиления усилителей и подбора постоянной времени фильтра низких частот обеспечивается уравнивание АЧХ сигналов с сейсмометра и гироскопа по углу наклона и тем самым улучшается компенсация помех-наклонов. 1 ил. (Л
| Информационный справочник по сейсмической аппаратуре, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Robert J | |||
| Gammp | |||
| The Gyro-acclero- meter seismometer (Gamometer) - AIAA Guidance and Control Conference, Stanford, California, 1972, August 14-16. | |||
