Изобретение относится к измерительной технике и может быть использовано для создания эталонных и образцовых средств измерения массы.
Цель изобретения - повышение точности взвешивания.
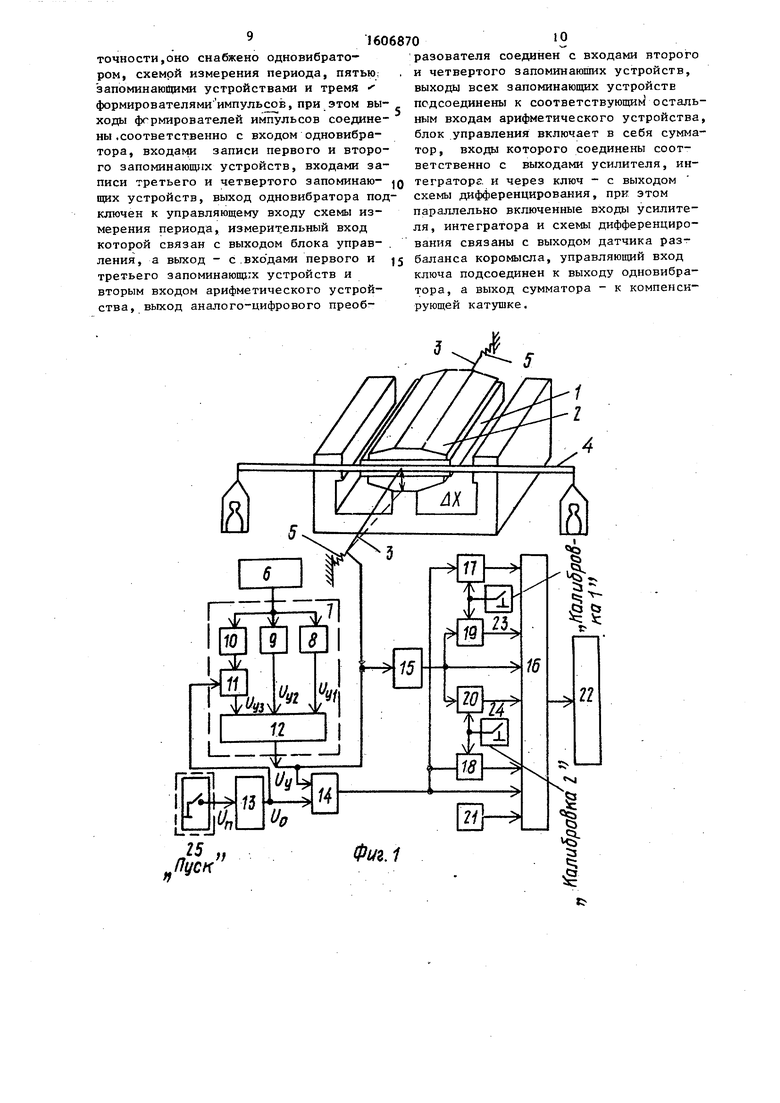
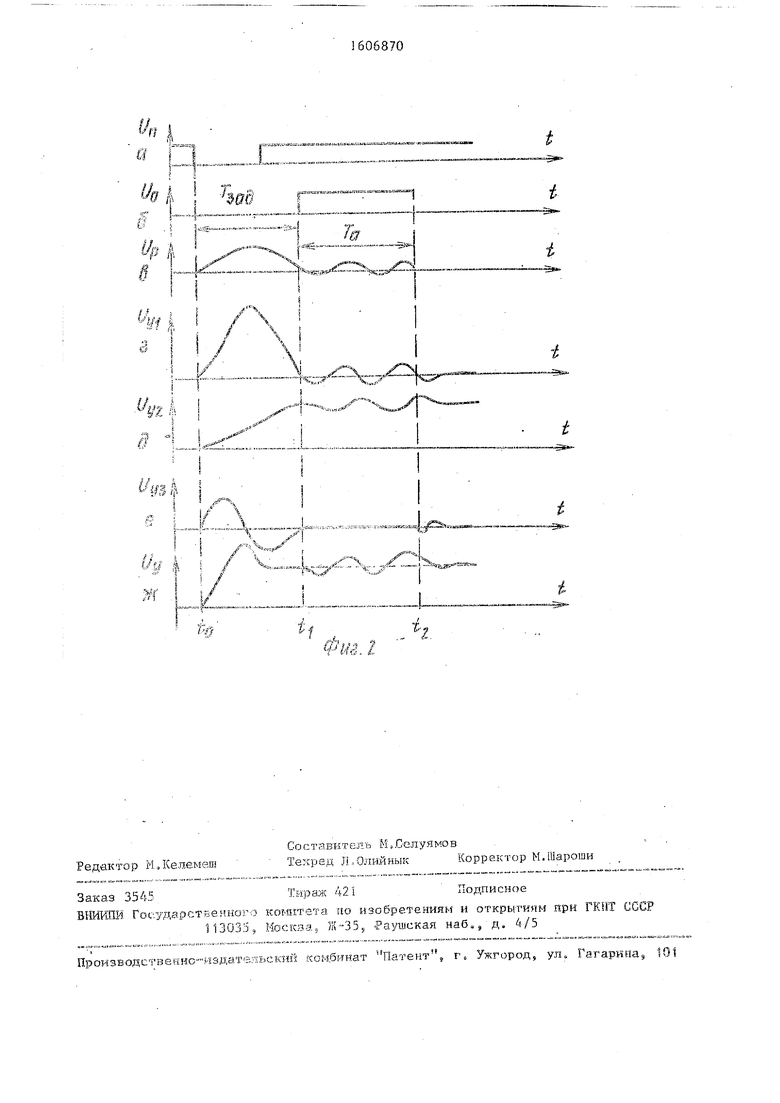
На фиг.1 приведена функциональная схема весов; на фиг.2 - временная да- аграмма, поясняющая их работу.
..
Предложенный способ взвешивания
основан на компенсации вращающего момента коромысла, создаваемого взвешиваемым грузом, путем нагружения про- . тивоположного плеча коромысла проти- вовесом известной массы, создания компенсирующего момента катушкой, по которой прютекает ток компенсации, поддерживающий коромысло в горизонтальном положении, ,и пересчета величины тока кo meнcaции в значение разности масс между взвешиваемым грузом и противовесом по формуле
м , (1)
IK где I - ток компенсации;
М( - масса калибровочного груза;
хток компенсации, уравнове- шивающий калибровочный груз.
в формуле () величина тока ком- пенсации, уравновешивающего калибровочный груз .(1ч) определяется автоматически при каждом взвешивании в зависимости от нагрузки на коромысло. Для определения;Iц весы калибруют дважды, один раз при минимально нагруженном коромысле, другой при на- груженном максимальйо. При каждой калибровке, .кроме знач ений тока, уравновешивающего калибровочный груз (1« IK. измеряют период собственных колебаний коромысла (Т,;, Т). При взвешивании из 1еряемого груза снова измеряют период колебаний коромысла Т. Считая приращение тока 1ц (относительно полученного при калибровк с минимальной нагрузкой 1,), пропор- циональным приращению периода колебаний , определяют IR из отношения
IlSl-IiL (2) т - т
гр гр
«г i
Ч С учетом выражений () и (2) раз ность масс между взьешиваемым грузом и противовесом определяют как
м т /П + .LlJli , (3 М I -7т - т
IK,Ik, Tj;, .
пропорциональность приращения ток калибровки (411 Ik IK) приращению периода колебаний i T Т - Тк вытекает из следуюш 1х соображений.
Ток компенсации калибровочного гр за обратно пропорционален магнитной индукции в зазоре, В
Ikl V-l/B. .(.4)
При малых перемещениях UX (просадках компенсирующей катушки, как эспери- ментально установленоj изменение ин- дукции с высокой степенью точности
(5)
описывается уравнением
в-1/(1 +к,
где К, - коэффициент, завйсявшй от
конструкции магнитной системы.
Просадка компенсирующей катушки, подвешенной на горизонтальных растяж ках, под действием силы тяжести суммарной нагрузки массой My , определяется длиной растяжек и характеристиками растягивающих пружин и при малых просадках
I )
АХ -V jMg-(6)
период свободных колебаний коромысла Т определяется
.(7)
Из выражений (4)-(7) следует, что
I. +К,Т),
(8)
k, г где К - коэффициент пропорциональнти.
Соответственно при минимальной максимальной нагрузке;
IK, -(i + KjT,),
к, Ч
(1 + ).
Предложенный способ взвешивания осуществляется коромысловыми весами с магнитоэлектрической компенсацией (фиг,1), содержащими компенсирующую катушку 1, расположенную в поле постоянного магнита 2 и закрепленную на уорсионных подвесках 3, с которой жестко связано коромысло 4 с подвесками для измеряемого груза и противовеса. Торсионные подвески 3 растянуты пружинами 5, выполняемыми обычно в виде жестких пластин. Весы содержат также датчик 6 разбаланса коромысла, блок 7 управления, состоящий из усилителя 8, интегратора 9, схемы 10 дифференцирования, ключа 11 и сумматора 12, одновибратор 13, схему 14 измерения периода, АЦП 15, арифметическое устройство 16, пять запоминающих устройств 17-21., блок 22 индикации и три формирователя 23,24 и 25 импульсов. В качестве запоминающих устройств 17-21 могут использоваться отдельные ячейки памяти одного запоминающего устройства. Формирователи 23-25 импульсов могут быть выполнены в виде кнопок, управляемых оператором, один из концов которых подключен к постоянному потенциалу, например нулевому.
Датчик 6 разбаланса подключен че- рез блок 7 управления к компенсирующей катушке 1 и входу АЦП 15, выход которого связан с входами запоминающих устройств 19, 20 и первым входом арифметического устройства 16. Вход управления схемы 14 измерения периода подключен к выходу одновибратора 13 и входу коммутации блока 7 управления, информационный вход - к вькоду блока 7
управления, а выход - к входам запЬ- минаюпщх устройств 17, 18 и второму входу арифметического устройства 16-.
ровочная гиря и по команде оператора
Пуск начинается процесс взвешивания, аналогичный процессу при первой каОстальные входы устройства 16 псдклю- , либровке. По нажатию операторам кноп- чены к соответствующим выходам запоми- ки Калибровка 2 (формирователь 24) нающих устройств 17-21, а выход - к , в третье и четвертое запоминающее уст- входу блока 22 индикации. Входы запи- ройства,20, 18 записываются соответ- си устройств 17 и 19 связаны с выхо- ственно период автоколебаний при мак- дом формирователя 23 импульсов, а вхо-Ю симапьной нагрузке на коромьюло (Tf), ды записи устройств 18 и 20 - с выхо--
дом формирователя 24. Входы усилителя 8, интегратора 9 и схемы 10 дифференцирования соединены параллельно и являются входом блока 7 управления, 15 вьп:оды усилителя 8 и интегратора 9 связаны непосредственно, а выход схемы 10 дифференцирования через ключ 11 - с соответствующими входами сумматора 12, выход которого является выходом блог- 20 ка 7 управления. Управляющий вход ключа 11 является входом коммутации блока 7 управления.
Предлагаемый способ осуществляется следующим образом,25
Первоначально весы ; калибруют два раза. При первой калибровке чашки освобождаются от груза (минимальная нагрузка на коромысло), затем на одну
и значения тока компенсации, уравновешивающего калибровочную гирю (1| ) . После этих двух калибровок весы готовы к взвешиванию неизвестного груза. Дпя этого на одной из чашек размещается взвешиваемый груз, а на другой подбирается противовес, при котором раз, ность масс в звешиваемого груза и противовеса не превышает диапазона автоматического уравновешивания. По команде оператора Пуск начинается процесс взвешивания, в результате которого на выходе устройств 15 и 14 формируется -значение тока компенсации разности масс взвешиваемого груза и противовеса (I ) и периода автоколебаний коромысла при данной нагрузке (Т). В арифметическом устройстве 16 с учетом значений, хранящихся
из чашек устанавливают заранее аттес- 30 в запоминающих устройствах 17-21,
тованную калибровочную гирю, масса которой не превышает диапазона автоматического уравновешивания. Значение массы калибровочной гири заранее записывается в запоминающее устройство 21. По - команде оператора Пуск начинается процесс взвешивания калибровочной гири. Кнопка Пуск обычно связана с арретиром, освобождающим механическое крепление коромысла. В процессе взвешивания на выходе АЦП 15 устанавливается цифровое значение тока компенсации, уравновешивающего калибровочную гирю, при минимальной нагрузке на ( , на выходе схемы 14 измерения периода - значение периода автоколебаний коромысла (Т). Процесс первой калибровки завершается нажатием оператором кнопки Калибров-, ка 1 (формирователь 23 импульсов).
по формуле рассчитывается разность масс, которая отображается на индикаторе 22.
Работа весов в процессе взвешивания, который одинаков как при калиб40
IK ьапоминаютпри этом значения Т и
ся соответственно в первом и втором
запоминающих устройствах 17 и 19.
При второй калибровке чашки весов нагружаются двумя одинаковыми грузами, соответствующими максимальной нагрузке на коромысло (наибольшему пределу взвешивания-НПВ) , затем на . одну Из чашек устанавливается калибровке, так и при измерении, заключается в следующем.
При нажатии оператором кнопки Пуск (формирователя 25) по отрицательному фронту сигнала U (фиг.2а) производит запуск одновибратора 13 и через йремя задержки момент времени t( на его выходе формирует-. ся импульс длительностью Т (фиг.2б). 45 До момента t весы находятся в режиме с Т абилизации (ключ П замкнут), и коромысло поддерживается в горизонтальном положении.
Работа весов в режиме стабилиза- 50 ции заключается в следующем.
При отклонении коромысла от горизонтального положения на выходе датчика 6 разбаланса (фиг.2в) появляется сигнал Up, не равный нулю. Блок 7 55.управления преобразует сигнал Up в сигнал управления компенсирующей ка- Тушки Un., который обеспечивает возвращение коромысла в исходное положе- кие. Блок 7 обеспечивает пропорциоровочная гиря и по команде оператора
Пуск начинается процесс взвешивания аналогичный процессу при первой калибровке. По нажатию операторам кноп- ки Калибровка 2 (формирователь 24) в третье и четвертое запоминающее уст- ройства,20, 18 записываются соответ- ственно период автоколебаний при мак- симапьной нагрузке на коромьюло (Tf),
либровке. По нажатию операторам кноп- ки Калибровка 2 (формирователь 24) в третье и четвертое запоминающее уст ройства,20, 18 записываются соответ- ственно период автоколебаний при мак симапьной нагрузке на коромьюло (Tf),
и значения тока компенсации, уравновешивающего калибровочную гирю (1| ) . После этих двух калибровок весы готовы к взвешиванию неизвестного груза. Дпя этого на одной из чашек размещается взвешиваемый груз, а на другой подбирается противовес, при котором разность масс в звешиваемого груза и противовеса не превышает диапазона автоматического уравновешивания. По команде оператора Пуск начинается процесс взвешивания, в результате которого на выходе устройств 15 и 14 формируется -значение тока компенсации разности масс взвешиваемого груза и противовеса (I ) и периода автоколебаний коромысла при данной нагрузке (Т). В арифметическом устройстве 16 с учетом значений, хранящихся
в запоминающих устройствах 17-21,
в запоминающих устройствах 17-21,
по формуле рассчитывается разность масс, которая отображается на индикаторе 22.
Работа весов в процессе взвешивания, который одинаков как при калиб-0
ровке, так и при измерении, заключается в следующем.
При нажатии оператором кнопки Пуск (формирователя 25) по отрицательному фронту сигнала U (фиг.2а) производит запуск одновибратора 13 и через йремя задержки момент времени t( на его выходе формирует-. ся импульс длительностью Т (фиг.2б). 5 До момента t весы находятся в режиме с Т абилизации (ключ П замкнут), и коромысло поддерживается в горизонтальном положении.
Работа весов в режиме стабилиза- 0 ции заключается в следующем.
При отклонении коромысла от горизонтального положения на выходе датчика 6 разбаланса (фиг.2в) появляется сигнал Up, не равный нулю. Блок 7 5.управления преобразует сигнал Up в сигнал управления компенсирующей ка- Тушки Un., который обеспечивает возвращение коромысла в исходное положе- кие. Блок 7 обеспечивает пропорционаяьно-интегрально-дифференцирующееуправление. Для этого сигнал UM поступает на входы усилителя 8, интегратора 9 и схемы 10 диф4)еренцирова- с НИН, выходные сигналы которых являются составляющими сигнала управления. Составляющая сигнала усилителя 8 (UK, фиг.2г),пропорциональная углу отклонения коромысла, обеспечивает ю отрицательную обратную связь cиcтe ы стабилизации коромысла. Составляющая сигнала интегратора 9 (и152,фиг.2д) , пропорциональная интегралу угла отклонения, и служит для исключения стати- J5 ческой ошибки,Составляющая сигнала схемы ,10 дифференцирования (Ui, фиг. 2е) ,пропорциональная с орости из- мен;ения угла поворота коромьгсла, обес- печивае.т электронное демпфирование, 20 необходимое ддя затухания системы. Сзпммарный сигнал управления (U L , фиг.2ж)-устанавливает коромысло в го- ризонтальнйе положение. В момент времени t, импульс с выхода одновибрато- 25 ра 13 (фиг.26) поступает на ключ 10, размыкая его. При этом из управляющего сигнала исключается составляющая электронного демпфирования и на время действования импульса одновибрато- 30 ра 13 (Tq) система уравновешивания переходит в автоколебательный режим. Одновременна импульс одновибратора 13 14 измерения периоподключает схему
да колебаний которая измеряет период 35
40
автоколебаний системы. По окончанию импульса (момент t система возвращается в режим стабилизации (ключ 11 замыкается), а коромысло стабилизируется в горизонтальном положении.
Отметим, что операции взвешивания калибровочного груза необходимы лишь при калибровке весов, что производится лишь при настройке весов после изготовления или ремонта, так как время хранения информации в запоминающих устройствах 17-21 неограничено.
При использовании предложенного способа повьш1ается в 2-5 раза точность взвешивания при одновременном увеличении диапазона измеряемых значений массы и снижении требований к однородности поля в системе постоянного магнита, что обеспечивает прецизи- ойную коррекцию-погрешности взвешива- 55 ния, обусловленную неоднородностью магнитного поля при магнитоэлектричес- о& компенсации измеряемой массы и провисанием катушки кo ffleнcaции.
50
45
Фо р.мула изобретения
1. Способ взвешивания, основанный на калибровке весов путем нагружения одного из. плеч их коромь1сла калибровочным грузом с последующей магнитоэлектрической компенсацией вращающего момента коромысла и измерения тока . компенсации, нагружения плеч коромысла взвешиваемым грузом и противове- , сом, магнитоэлектрической компенсации результирующего вращающего момента и преобразования тока компенсации в значение массы взвешиваемого груза, отличающийся тем, что, с целью повышения точности,, после первичной калибровки весов вторично осуществляют процесс калибровки с максимальной нагруз кой на плечи коромысла, при этом перед каждой компенса- - цией вращающего момента коромысло вво- дят в режим колебаний, измеряют их период, а разность М масс взвешивае- .МОго груза и противовеса определяют из выражения
5
0
5
0
М М,
HO
J-i,
..
X,
Т - Т
где
М 1,Т
Iv,1К (
I
J-K, J-K,7
масса калибровочного груза; значения тока компенсации и периода колебаний коромысла при его нагруясении взвешиваемым грузом и противовесом;
значения тока компенсации и периода колебаний коромысла при первичной калибровке; значения тока компенсации . и периода колебаний коромысла при вторичной калибровке с максимальной нагрузкой на коромысло,
2. Устройство для взвешивания с 5 магнитоэлектрической компенсацией,
содержащее компенсирующую катушку,расположенную в поле постоянного магнита и закрепленную на торсионных подвес- ках, с которой жестко связано коро- |мысло .с подвесками для измеряемого, хруза и противовеса, датчик разбаланса коромысла, подключенный через блок, управления к компенсирующей катушке, алого-цифровой преобразователь, че- - рез который компенсирующая катушка связана с первым входом арифметического устройства,выход которого подключен к блоку индикации,-----е с я тем, что,
отличающе с целью, повышения
т
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические весы | 1982 |
|
SU1059441A1 |
| Весы | 1982 |
|
SU1137324A1 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ГРУЗОВ НА РЫЧАЖНЫХ ВЕСАХ И ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2006 |
|
RU2308678C1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| БМЬЛИОТ^НЛ | 1973 |
|
SU365583A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности взвешивания. Способ взвешивания заключается в проведении первичной калибровки весов известным грузом путем магнитоэлектрической компенсации вращающего момента коромысла и измерения тока компенсации, вторичной калибровки весов тем же грузом при максимальаной нагрузке на плечи коромысла и собственно взвешивания, при этом перед каждой компенсацией вращающего момента коромысло вводят в режим колебаний, измеряют их период и учитывают его при определении массы взвешиваемого груза. Устройство для взвешивания с магнитоэлектрической компенсацией содержит компенсирующую катушку, расположенную в поле постоянного магнита и закрепленную на торсионных подвесках, датчик разбаланса коромысла, подключенный через блок управления к аналого-цифровому преобразователю. При нажатии кнопок "Калибровка 1","Калибровка 2" производится калибровка гири соответственно при минимальной, максимальной нагрузках на коромысло. Измеряется соответствующие токи компенсации и периоды автоколебаний. При нажатии кнопки "Пуск" нулевой потенциал кнопки запускает одновибратор 13. Схема 14 измеряет период автоколебаний. Значение массы калибровочной гири заранее записывается в запоминающее устройство. Арифметическое устройство рассчитывает разность масс, которая отображается на индикаторе. 2 с.п. ф-лы, 2 ил.
