движения орудия лова относителыто воды, другой вход которого соеди)ен с восьмом входом вычислительного блока и объеди} н с другим вхо,т,ом первого элемента сравнения, другой выход которого f выходы второго элемента сравнения и узла определения предельно допустимых значений uiara винта являются вторыми, а другой
выход третьего и вьгход четвертого узлов сравн(ния соответственно-- третьим и перi5b M Biiixo/iaMH .вычислительного блока, при этой из входов четвертого узла Сравнения соединен с выходом узла определения предельно допустимых З1.ачений пагрузки главь:ого двигателя, а другой вход является вторым входом вычислительного блока
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления главными двигателями судовой силовой установки и винтом регулируемого шага | 1981 |
|
SU990587A2 |
| Система управления орудием лова | 1975 |
|
SU644432A1 |
| Устройство управления пелагическим тралом | 1983 |
|
SU1194345A1 |
| ПРОМЫСЛОВАЯ ЛЕБЕДКА | 1973 |
|
SU407828A1 |
| УСТРОЙСТВО для СПУСКА и ПОДЪЕМА ОРУДИЙ ЛОВА | 1973 |
|
SU379448A1 |
| ТРАЛОВАЯ ЛЕБЕДКА | 1970 |
|
SU285409A1 |
| СУДНО-ДОК, ПРОМЫСЛОВОЕ | 2010 |
|
RU2435698C1 |
| Устройство для лова рыбы | 1987 |
|
SU1517881A1 |
| Система управления орудием лова | 1982 |
|
SU1083995A1 |
| Способ и устройство контроля ведения промысловых работ с использованием трала при осуществлении мониторинга судов рыбопромыслового флота | 2017 |
|
RU2666170C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СУДОВЫМ ОБОРУДОВАНИЕМ, содержащее командоаппарат, выход которого соединен с первым входом вычислительного блока, первый выход которого соединен с одним из входов блока формирования сигналов управления главным двигателем и винтом регулируемого шага, выходы которого связаны с регулятором частоты вращения главного двигателя и механизмом изменения шага винта, датчики давления воздуха и частоты вращения главного двигателя, подключенные к одним входам блока контроля нагрузки главного двигателя, выход которого соединен с вторым входом вычислительного блока, к третьему, четвертому и пятому входам которого подключены соответственно выходы датчиков силы натяжения, длины выбранного ваера и шага винта, блок формирования сигналов управления приводом ваерной лебедки, связанной с орудием лова, и датчик скорости судна, отличающееся тем. что. с Целью повышения надежности, оно снабжено подключенным выходом к другому входу блока контроля нагрузки главного двигателя датчиком максимальной температуры выпускных газов главных двигателей, подключенными выходами соответственно к шестому и седьмому входам вычислительного блока датчиками угла входа в воду и скорости выборки ваера, задатчиком скорости течения воды и курса судна, подключенным входами к выходам датчика скорости судна и задатчика скорости течения воды и курса судна, сумматором и .блоком защиты, выход которого соединен с одним из входов блока формирования сигналов управления приводом ваерной лебедки, подключенного другим входом к выходу командоаппарата, причем выход сумматора соединен с восьмым входом вычислительного блока, к второму и третьему выходам которого соответственно подключены другие входы блока формирования сигналов управления главным двигателем судовой установки и винтом регулируемого щага и вход блока защиты, а вычислительный блок выполнен на узлах определения предельно допустимых значений скорости выборки ваеров, шага винта и нагрузки с главного двигателя, элементах сравнения Q и узле определе 1ия скорости движения ору(Л дия лова относительно воды, выход которого соединен с одним из, входов первого элемента сравнения, к одному из выходов которого подключен один из входов узла определения предельно допустимых значений нагрузки главного двигателя, другой вход которого является пятым входом вычислительного блока и объединен с одним из входов второго элемента сравнения, подключенного другим входом к выходу узN3 ла определения допустимых значений шага сл винта, входы которого соответственно явсд ляются шестым, восьмым, первым и четвертым входами вычислительного блока, с двумя последними из которых соединены одни входы узла определения предельно допустимых значений скорости выборки ваеров. другой вход которого являегся третьим входом вычислительного блока, а выход соединен с одним входом третьего элемента сравнения, другой вход которого является седьмым входом вычислительного блока, а один из выходов соединен с одним из входов узла определения скорости
Изобретение относится к судостроению, а именно к автоматическим устройствам управления главными двигателями судовой силовой установки, винтом регулируемого шага и ваерными лебедками траулеров.
Известно устройство для управления судовым оборудованием, содержащее командоаппарат, выход которого соединен с первым входом вычислительного блока, первый выход которого соединен с одним из. входов блока формирования сигналов управления главным двигателем я ВКЕГГОМ регулируемого шага, выходы которого связаны, с регулятором частоты вращения главного двигателя и механизмом изменения шага винта, датчики давления воздуха и частоты враидения главного двигателя, подключенные к одним входам блока контроля нагрузки главного двигателя, аыход которого соединен с вторым входом вычислительного блока, к третьему, четвертому к пя тому входам которого подключены соответственно выходы датчиков силы натяжения, длины выбранного ваера и шага винта, блок формирования сигналов управления приводом ваерной лебедки, связанной с орудием лова, и датчик скорости судна 1.
Однако известное устройство не обеспечивает согласованной работы главного двигателя судовой силовой установки и регулируемого шага с ваернымя лебе/1камн траулеров, что усложняет процесс управления и снижает надежность работы.
Цель изобретения - повышение надежности.
Цель достигается тем, что устройство для управления судовым оборудованием, содержаш,ее командоаппарат, выход которого соединен с первым входом вычислительного блока, первый выход которого соединен С одним из входов блока формирования сигналов управления главным двигателем и винтом регулируемого шага, зыходы которого связаны с регзлятором частоты
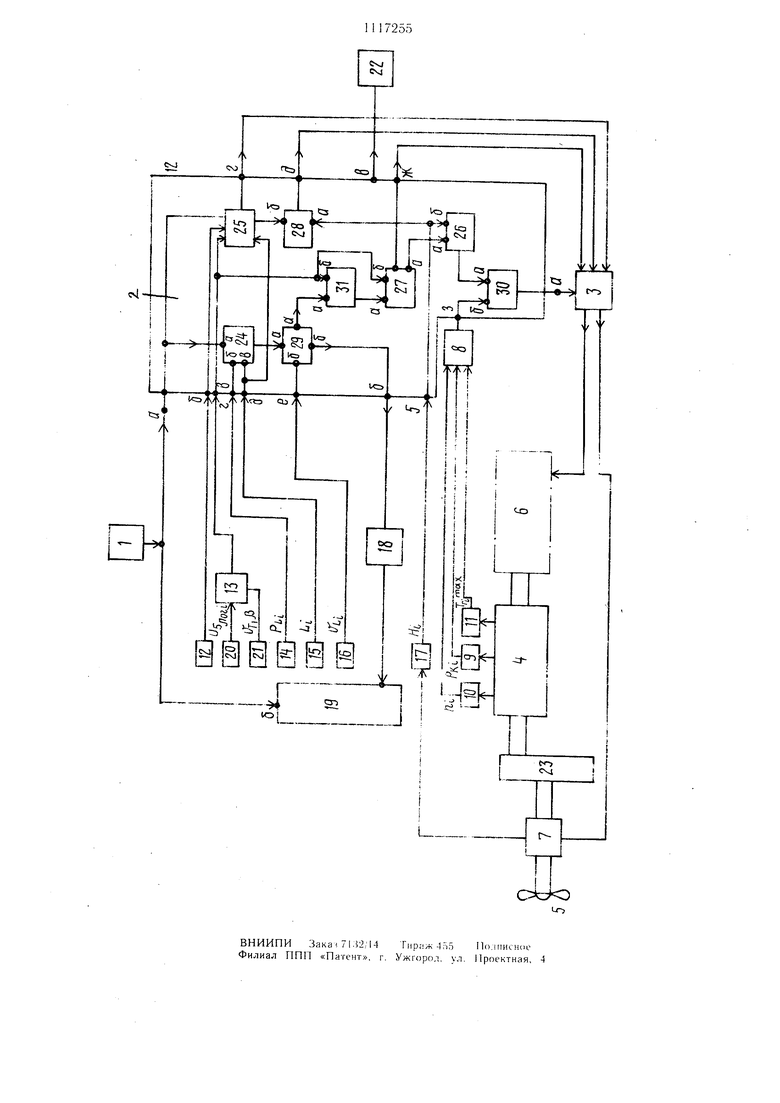
вран1еиия главного двигателя и .механизлюм измс|1ения тага винта, датчики давления воздуха и частотьг вращения главного двигателя, подключенные к одним входам блока контроля нагрузки главного двигателя, выход которого соединен с вторым входом вычислительного блока, к третьему, четвертому и г)ятому входам которого под:.лючены соответственно выходы датчиков снль натяжения, длины выбранного ваера н н)ага винта, блок формирования сигналов управления приводом ваерной лебедки, связанной с орудием лова, и датчик -скорости судна, снабжено подключенным выходом к другому входу блока контроля нагрузки главного двигателя датчиком максимальной температуры выпускных газов главных двигателей, подключенными выходами соотаетстиенно к пустому и седьмому входам вычислительного блока датчиками угла входа в воду и скорости выборки ваера, задатчико.м скорости течения воды и курса судна, по.ак.поченным входами к выходам датчика скорости судна и задатчика скорости точения воды и курса судна, сумматором н блоком защиты, выход которого соединен с одним из входов блока формирования сигкалов управления приводом ваерной лебедки, подключенного другим входом к выходу 1сочандоа П1арата, причем выход сумматора соединен с восьмым входом вычислительного блока, к второму и третьему выходам которого соответственно подключены друП1к входы блока фор.мирования сигналов управления главным двигателем судовой установки и винтом регулируемого шага и вход блока защиты, а вычислительный блок выполнен на узлах определения предельно допустимых значений скорости выборки ваеров, шага винта к нагрузки главного двигателя, элементах сравнения и узле определения скорости движения орудия лова относительно воды, выход которого €седи 1еи с о.дним из .входов первого -элемента сравнения, к однол у из выходов которого подключен один из входов узла определения предельно допустимых значений нагрузки главного двигателя, другой вход которого является пятым входом вычислительного блока и объединен с одним из входов второго элемента сравнения, ПОДКЛЮЧЁННОГО другим входом к выходу узла определения допустимых значений шага винта, входы которого соответственно являются шестым, восьмым, первым и четвертым входами вычислительного блока, с двумя последними из которых соединены одни входы узла определения предельно допустимых значений скорости выборки ваеров, другой вход которого является третьим входом вычислительного блока, а выход соединен с одним входом третьего элемента сравнения, другой вход которого является седьмым входом вычислительного блока, а один из выходов соединен с одним из входов узла определения скорости движения орудия лова относительно воды, другой вход которого соединен с восьмым входом вычислнтслъииго блока и объединен с другим входом первого элемента сравнения, другой вы.ход которого и выходы второго элемента сравнения и узла определения предельно допустимых значений шага винта являются вторыми, а другой выход третьего и выход четвертого узлов сравнения соответственно - третьим и первым выходами вычислительного блока, при этом один из входов четвертого узла сравнения соединен с выходом узла определения предельно допустимых значений нагрузки главного двигателя, а другой вход является вторым входомвычислительного блока. На чертеже приведена функциональная схема устройства для управления судовым оборудованием. Устройство содержит командоаппарат 1, выход которого соединен с входом а вычислительного блока 2, выход а которого соединен с входом а блока 3 формирования сигналов управления главным двигателем 4 и винтом 5 регулируемого шага, выходы которого соединены с регулятором 6 частоты вращения главного двигателя 4 и механизмом 7 изменения шага винта, подключенные к входам блока 8 контроля нагрузки главного двигателя 4 датчики давления наддувочного воздуха 9, частоты враш,ения 10 и максимальной температуры выпускных газов 11 главного двигателя, подключенные к входам б, 0, г. д. е н лг вычислительного блока 2 датчик 12 угла входа ваера в воду, сумматор 13 и датчики силы натяжения 14 ваера, длины 15 выбран1юго feaepa, скорости 16 выборки ваера и шага вннта 17, блок 18 защиты, выход которого соединен с входом а блока 19 формирования сигналов управления приводом ваеркой лебедки, вход б которого соединен с выходом .командоаппарата 1, причем входы сумматора 13 соединены с выходами датчика 20 скорости судна и задатчика 2 скорости течения воды и курса судна, а выход блока 8 контроля нагрузки главного двигателя - с входом з вычислительного блока 2, к выходам б, в, г, д ж подключены соответственно входы блоков защиты 18, Информации 22 н формирования сигналов yrfpaвлeния 3 главным двигателем. Главный двигатель 4 кинематически связан через редуктор 23 и механизм 7 изменением шага вннта с винтом 5 регулируемого шага. Вычислительный блок 2 выполнен на узлах определения предельно допустимых значений скорости 24 выборки ваеров, шага 25 винта н нагрузки 26 главных двигателей, элементах 27-30 сравнения и узле 31 определения скорости движения орудия лова относительно воды, выход которого соединен с входом а элемента 27 сравнения к выходу а которого подключен вход а узла 26 определения предельно допустимых значений нагрузки главного двигателя, вход б которого является входом ж вычислительного блока 2 и объединенс входом а элемента 28 сравнения, подключенного входом б к выходу узла 25 определения допустимых значений шага винта, входы которого являются входами б, в, д н а вычислительного блока 2, с двумя последними нз которых соединены входы б и о узла 24 определения предельно допустимых значений скорости выборки ваеров, вход в которого является входом г вычислительного блока 2, а выход соединен с входом а элемента 29 сравнения, вход б которого является входом е вычислительного блока 2, а выход а соединен с входом а узла 31 определения скорости движения орудия лова относительно воды, вход б которого соединен с входом в вычислительного блока 2 и объединен с входом б элемента 27 сравнения, выход б которого, выходы элемента 28 сравнения н узла 25, выход б элемента 29 сравнения и выход элемента 30 сравнения соответственно являются выходами ж, д, г, б и а вычислительного блока 2, при этом вход а элемента 30 сравнения соединен с выходом узла 26, а вход б является входом з вычислительного, блока 2. Устройство работает следующим образом, Прн выполнении промысловой операции оператор воздействует на командоаппарат
1, который формирует соответствующую ко манду для вычислительного блока 2 и блока 19.
Блок 24 согласно разработанному алгоритму, учитывая текущую информацию, полу чаемую от датчиков 14 силы натяжения ваера и 15 длины выбранного ваера, производит вычисление предельно допустимого значения скорости выборки вееров VtiJ. при котором исключается возможность перегрузки привода ваерной лебедки.
Выходной сигнал от блока 24, пропорц} ональный значению VLjL поступает в- эле мент 29 сравнения, получающий также информацию от датчика б скорости выборки ваеров Vti . При значении Vn IV;,/ j сигнал от элемента 29 сравнения поступает на блок 8 защиты привода ваерной лебедки от перегрузки, который передает команду на блок 9 формирования сигналов управления приводом ваерной лебедки на снижение нагрузки. Отработка сигнала происходит до тех пор, пока не будет достигнуто условие Vif Vf. соб.людении этого условия сигнал от элемента 29 сравнения поступает в узел 31 определения скорости движения орудия лова относительно воды Vf, где с учето. информации, полученной от датчика 20 скорости судна, сумматора 13 и задатчика 21 величин скорости течения и курса судна, производится вычисление скорости У/ .
Одновременно с этим в узле 25, согласно разработанному алгоритму с учетом текущей информации получаемой от датчиков 15 длины выбранного ваера и 12 угла входа ваера в воду, и сигнала на выходе сумматора 13, пропорционального скорости Vg судна при промысловом маневре, вычисляется допустимое значение шага винта IHf .
Выходной сигнал узлз 25, пропорциональный уменьшению шага ВРШ до fH j | поступает в блок 3, который передает команду на механизм 7 изменения шага винта. .Элемент 28 сравнения воспринимает сигнал Hj j с выхода узла 25, сравнивает его с сигналом от датчика 17 шага винта Hj и выходным сигналом воздействует на блок
7до тех пор, пока не будет соблюдено условие И; H;JПри Vf Л,у сигнал от элемента 27 сравнения поступает в блок 3 до соблюдения условий А Vsj при Н. 4 iNj .
При соблюдении условия Vj Vsi сигнал or элемента 27 сравнения поступает в блок 26, где с учетом информации от датчика 17 шага ВИНТИ производится вычисление допустимой нагрузки главного двигателя Wei.
8блоке 8 контроля нагрузки главного двигателя с учетом информации от датчиков 10 частоты вращения, 9 давления наддувочного воздуха и 1 максимальной температуры аьпускных газов, производит вычисление текущей нагрузки главного двигателя
Выходные сигналы с узла 26 и блока 8, пропорциональные соответственно | We j к Ne , поступают в элемент 30 сравнения.
При значении Ne Nej сигнал от алерлеита 30 сравнения поступает в блок 3, который, с учетом разработанного алгоритма, передает сигнал либо на регулятор 6 частоты вращения главного двигателя, либо на механизм 7 изменения шага винта до тех пор, пока не будет соблюдено условие Nej , jEej , npnVj Vsj H/i|Hj.
Использование изобретения на траулера. флота рыбной промышленности позволит осуществить совместное управление комплексом главные двигатели судовой установки - винт регулируемого шага - ваерчы-i лебедки при промысловых операциях с помощью воздействия оператора на один орган управления, /то значительно упрощаег управление, устраняет перегрузки глазного двигателя и привода ваерной лебедки, позволяя повысить надежность работы судовой силовой установки н ваерной лебедки в целчэм, сократить потери уловов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления главными двигателями судовой силовой установки и винтом регулируемого шага | 1981 |
|
SU990587A2 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
