Изобретение относится к судостроению, в частности, к системам управления главными двигателями судовой силовой установки.
По основному авт.св. № 856894 известна система управления главными .двигателями судовой силовой установки и винтом регулируемого шага, содержащая датчики частоты вращения и мощности и регуляторы частоты вращения двигателей, механически связанные с сервомоторами, коммутаторы, механизм изменения шага винта с блоком управления, а также датчики . дифферента, первой производной дифферента, скорости,вертикального перемещения центра тяжести судна,. фактической скорости движения, шага винта и частоты вращения валопровода и задатчики скорости хода с каналами связи, подключенньми к вычислительному устройству, а также содержащая блоки соответственно прогнозирования, контроля и представления инфоЕЯйации и блоки управления сервомоторов, при этом вычислительное устройство связано с блокс 1 прогнозирования, входы которого подключены к датчикам дифферента, первой производной дифферента и скорости вертикального перемещения центра тяжести судна, а выходы через блоки уЛравления сервомоторов, воздействующих, на регуляторы частоты вращения двигателей, связаны с блоком управления механизмом изменения шага винта/ при этом вход блока контроля связан с выходами датчиков частоты вращения двигателей, датчиков
10 их мощности и коммутаторов, а выход блока контроля - с входом вычислительного устройства Cl 1Недостатком известного устройства йвляется невозможность управления 5 глубиной погружения разног.лубинного трала.
Цель изобретения - расширение функциона.пьных возможностей путем 5Шравления глубиной погружения раз20ноглубинного трала при изменяющихся внешних условиях эксплуатации.
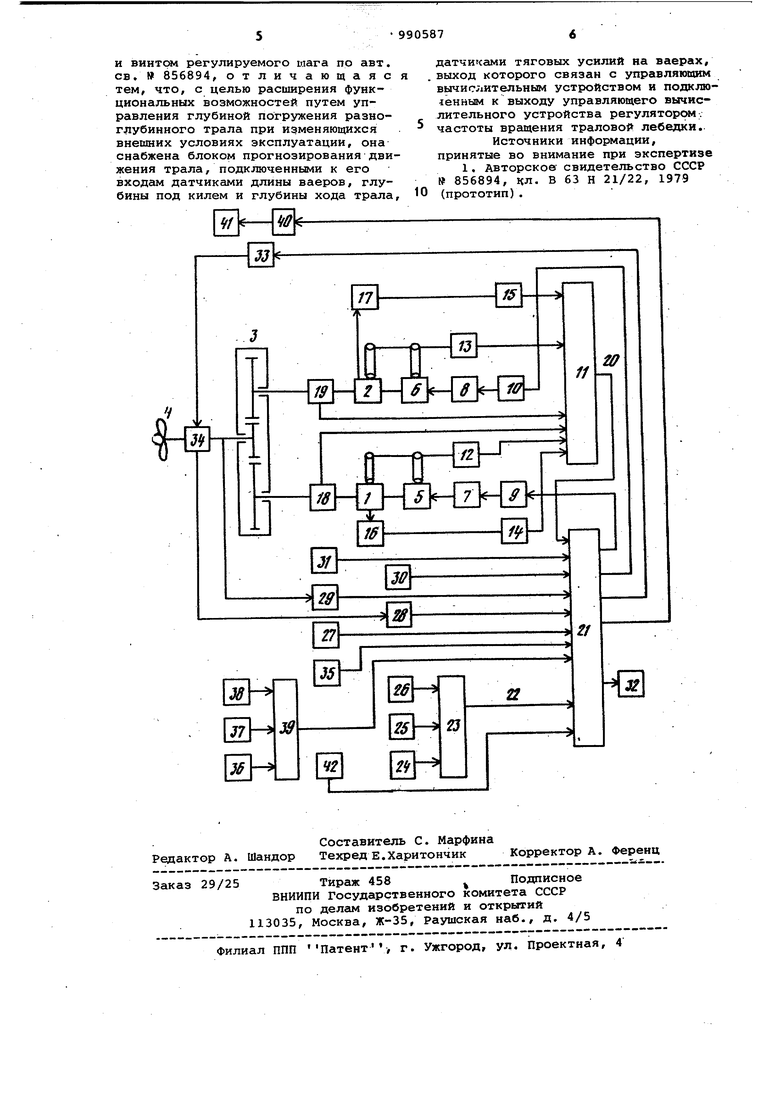
Цель достигается тем, что система управления снабжена блоком прогнозирования движения трала, подалючен251шми к его входам датчиками длины ваеров глубины под килем и глубины хода трала, датчиками тяговых усилий на ваерах, выход которого связан с управлякицим вычислительньм 30 устройством и подключенньм к выходу управляющего вычислительного устрой ства регулятором частоты вращения траловой лебедки. На чертеже представлена функциональная схема системы управления. Система содержит главные двигатели 1 и 2, кинематически связанные через редукторный агрегат 3 с гребным винтом 4 регулируемого шага, регуляторы 5 и б частоты вращения главных двигателей, сервомоторы 7 и 8 с блоками 9 и 10 управления,конту контроля параметров двигателей,вклю чающий блок 11 контроля, датчики 12 и 13 мощности, коммутаторы 14 и 15, блоки 16 и 17 датчиков индикаторног давления, датчики 18 и 19 частоты вращения, каналы 20 связи с управляющим вычислительным устройством 21, канал 22 связи с блоком 23 прог нозирования возмущающих воздействий содержащий датчики 24 дифферента, первой Производной 25 дифферента, скорости вертикального перемещения 26 центра тяжести судна. Система также содержит датчики фактической скорости хода 27 судна, шага 28 винта, оборотов валопровода 29гребного винта, задатчики режима 30работы, скорости 31 хода судна, а также блок 32 представления инфор мации, блок 33 управления механизмом изменения шага и механизм 34 изменения шага винта, да.тчики глуби ны 35 погружения трала, глубины36 хода трала, глубины 37 под килем длины 38 ваеров, блок 39 прогйозиро .вания движения трала, регуляторы 40 частоты вращения траловой лебедки и траловую лебедку 41, датчики 42 тяговых усилий на ваерах. Система управления работает следующим образом. После запуска двигателей 1 и 2 и ввода их в режим, в зависимости от положения задатчика 30 режима работы, управляющее вычислительное устройство 21 (УВУ) получает соответствующую команду для реализации законов управления главными двигате лями винтом регулируемого шага,двигателями траловой лебедки, с учетом информации о текущих и прогнозируемых значениях возмущающих воздействий, которые поступают от датчиков 24 дифферента судна, первой производной 25 дифферента, скорости вертикального перемещения 26 центра тяжести судна и информации рельефа дна по ходу трала, получаемых от датчиков глубины 36 хода трала и глубины 37 под килем судна. Суть управления в режиме ход в свободной воде сводится к отслеживанию волнового воздействия по прогнозируемому дифференту судна с целью стабилизации колебаниймощности главных двигателей изменениями шага винта, В режиме ход с тралом задатчиками скорости 31 хода судна и глубины 35 погружения трала устанавливаются заданные значения скорости хода судна и глубины погружения трала относительно поверхности воды ИЛИ дна, которые вместе с информацией о тяговых усилиях наваерах, получаемой от датчиков 42 текущих и прогнозируемьк изменениях рельефа дна по ходу трала, получаемой с выхода блока 39 при помощи датчиков 36 - 38, поступают на входы управляющего вычислительного устройства 21(предварительно пройдя через коммутатор, аналого-цифровые преобразователи, преобразователи кодов). по результатам полученной информации УВУ организует управление винтом 4 регулируемого шага и (или) траловой лебедкой 41, посредством блока 33 управления механизмом изменения шага винта и (или) регуляторов частоты вращения двигателей 40 траловой лебедки. Распределение мощности между двигателями 1 и 2, работающими на редукторный агрегат 3, во всех перечисленных выше режимах осуществляется на основе информации о текущих значениях мощности дизелей, поступающей от датчиков 12 и 13 мощности с учетом технического состояния двигателей, при этом учитывается загрузка двигателей по цилиндрам с помощью датчиков 16 и 17 индикаторного давления, которые связаны с УВУ при помощи коммутаторов 14 и 15. Для текущего контроля силовойустановки предусмотрен блок 32 представления информации, в состав которого входят цифропечатающие устройства и дисплей. Система управления позволяет, наряду с решением задач стабилизации колебаний мощности двигателей при волновом воздействии и распределения мощности между двумя двигателями, работающими на, один редукторный агрегат, исключить задевы трала о морской грунт и тем самым предотвратить повреждение промыслового снаряжения, а также повысить эффективность работы комплекса судноваер-трал при лове придонных пород рыбы и точность вывода трала на заданную глубину, тем самым увеличить экономическую эффективность эксплуатации судна и промыслового оборудования. Формула изобретения Система управления главными двигателями судовой силовой установки
и винтом регулируемого шага по авт. св. 856894, отличающаяс тем, что, с целью расширения функциональных возможностей путем управления глубиной погружения разноглубинного трала при изменяющихся внешних условиях эксплуатации, она снабжена блоком прогнозирования движения трала, подключенными к его входам датчиками длины ваеров, глубины под килем и глубины хода трала.
isskдатчиками тяговых усилий на ваерах, выход которого связан с управляющим вычислительным устройством и подключенным к выходу управляющего вычислительного устройства регуляторе. частоты вращения траловой лебедки.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 856894, кл. В 63 Н 21/22, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления главными дмигателями судовой силовой установки и винтом регулируемого шага | 1979 |
|
SU856894A1 |
| Система управления орудием лова | 1975 |
|
SU644432A1 |
| Система управления орудием лова | 1982 |
|
SU1083995A1 |
| Судовая энергетическая установка | 1980 |
|
SU931589A1 |
| Распорная траловая доска | 1983 |
|
SU1143365A1 |
| Устройство управления пелагическим тралом | 1983 |
|
SU1194345A1 |
| Судовая энергетическая установка | 1977 |
|
SU637299A1 |
| РАСПОРНАЯ ТРАЛОВАЯ ДОСКА | 2000 |
|
RU2172584C1 |
| Тренажер судоводителя | 1972 |
|
SU484124A1 |
| Устройство для наведения разноглубинного трала на глубину залегания косяка | 1975 |
|
SU728809A1 |
