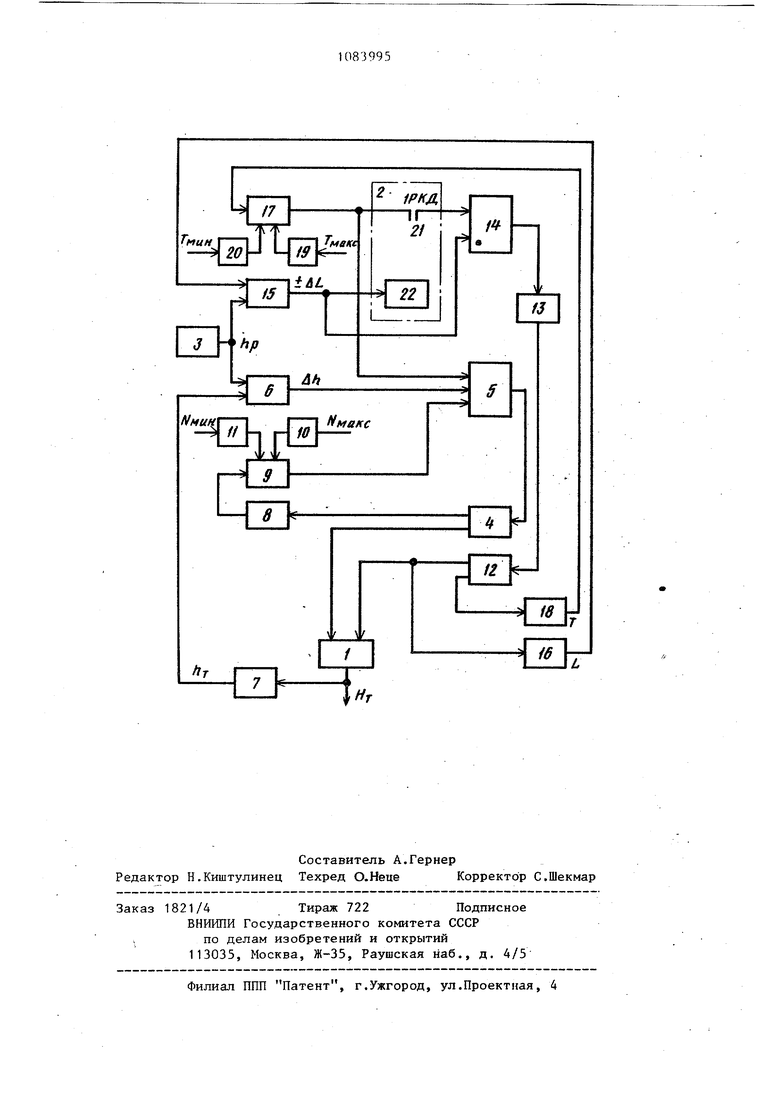
Изобрстсмше относится к промышле р1.1боловству, а именно к систе мам управления оружием лова на глу бине , Известно устройство для регулиро вания глубины погружения траловой сети, включающее комплекс судно-ваер-трал, привод траловой лебедки, датчики глубины, трала и косяка рыбы, а также контур регулирования глубины трала посредством изменения скорости судна, содержащий .главную силовую установку судна, регулятор скорости судна и блок суммирования взаимносвязанные так, что выход регулятора скорости судна связан со входом силовой установки, на первый вход блока суммирования подключен выход датчика глубины косяка рыбы, на второй вход - датчик глубины тра ла, вход последнего связан с выходо комплекса судно-ваер-трал, а первый выход привода траловой лебедки и вы ход главной силовой установки соеди нены соответственно с первым и вторым входами комплекса судно-ваертрал Cl J. Однако это устройствохарактерна зуется недостаточно широким диапазо ном автоматического регулирования глубины трала, не позволяет осущест влять траление на номинальной скорости и не имеет надежных средств защиты от перегрузок главной силовой установки в переходном процессе при подъеме и спуске трала, что особенно заметно при отработке малых рассогласований между заданном и фактическим значениями глубины трала. Известна также система управления тра:лом по глубине, содержащая комплекс судно-ваер-трал, связанный посредством датчика глубины тра ла с блоком суммирования, к второму входу которого подключен датчик глубины косяка рыбы, подсоединенный к блоку определения расчетной длины ваеров, контур регулирования глубины трапа, включающий главнзво силовую установку, соединенную с первым входом регулятора скорости судна через последовательно связанные датчик мощности главной силовой установки и блок ограничения мощнос ти, включающий задатчик уставок максимальной мощности главной силовой установки, логическое устройство и контур регулирования глубины 95 трала посредством изменения длины ваеров, содержащий датчики рабочей дЛины вытравленных ваеров и усилий в ваерах, подключенные к логическЬму устройству соответственно через блок определения расчетной длины ваеров и блок ограничения усилий в ваерах, включающий задатчик максимальных усилий в ваерах, и регулятор длины ваеров, к входу которого подключено логическое устройство, а выход связан с комплексом судно-ваер-трал через привод траловой лебедки Г2 J, Однако эта система характеризуется низкой точностью управления. Цель изобретения - повьппение точности управления. Поставленная цель достигается тем, что система, содержащая комплекс судно-ваер-трал, связанный посредством датчика глубины трапа с блоком суммирования, к второму входу которого подключен датчик глубины косяка рыбы, подсоединенный к блоку определения расчетной длины ваеров, контзтр регулирования глубины трапа, включающий главнзпо силовую установку, соединенную с первым входом регулятора скорости судна через последовательно связанные датчик мощности главной силовой установки и блок ограничения мощности,. включающий задатчик уставок максимальной мощности главной силовой установки, логическое устройство и контзФ регулирования глубины трала посредством изменения длины ваеров, содержащий датчики рабочей длины вытравленных ваеров и усилий в ваерах, подключенные к логическому устройству соответственно через блок определения расчетной длины ваеров и блок ограничения усилий в ваерах, включающий задатчик максимальных усилий в ваерах, и регулятор дпины ваеров, к входу которого подключено логическое устройство, а выход связан с комплексом судно-ваер-трал чере,- привод траловой лебедки, дополнительно снабжена задатчикамиуставок минимальной мощности силовой установки и минимальных усилий в ваерах и задатчиком интенсивности пуска и остановки привода траловой лебедки, при этом последний связан с выходом регулятора длины ваеров и входом привода траловой лебедки, задатчик уставок минимальной мощности силовой установки и минимальных усилий в ваерах подключены соответственно к блокам ограничения мощности и усилий в ваерах, выход блока суммирования подключен к второму входу регулятора скоро ти судна, к третьему входу которого подсоединен блок ограничения усилий в ваерах, а блок ограничения усилий в ваерах связан с вторьм входом регулятора длины ваеров. На чертеже изображена функциональ ная схема предлагаемой системы автоматического управления тралом. Система автоматического управления орудием лова, например тралом по глубине, содержит комплекс судноваер-трал, логическое устройство 2, датчик 3 глубины косяка рыбы (Lp) и два контура регулирования глубины трала. В контур регулирования глубины трала посредством изменения скорости судна входит главная силовая установка 4, подключенная своим первом выходом к первому вхбду комплекса 1 регулятор 5 скорости судна, блок 6 cy iмиp6вaния, датчик 7 глубины трала (t,.), вход которого соединен с выходом комплекса 1. К первому и второму входам блока 6 подключены соответственно выходы датчиков 3 и 7 глубины косяка рыбы и глубины трала, а выход блока 6 соединен с первым входом регулятора 5 скорости судна, выход которого подключен ко входу главной силовой установки 4. Цепь обратной связи по мощности главной силовой установки 4 образуют датчик 8 мощности главной силовой установки (N), своим входом подключенный к второму выходу установки 4, и блок 9 ограничения мощности , своим первым входом присоединенный 1 к выходу датчика 8 а выходом - к второму входу регулятора 5 скорости судна. К второму и третьему входам блока 9 подключены задатчики 10 и ,11 уставок; максимальной ()H . минимальной (Nj ) силовой установки 4. Контур регулирования глубины трала посредством изменения длины ваеров содержит последовательно включенные элементы: привод 12 траловой лебедки, своим первым выходом соединенный с вторым входом комплек са 1, задатчик 13 интенсивности . пуска и остановки привода траловой 5 лебедки, регулятор 14 длины ваеров, блок 15 определения расчетной длины ваеров и датчик 16 рабочей длины вытравленных ваеров, вход которого подключен к первому выходу привода 12, а выход - к первому входу блока 15, второй вход блока 15 связан с выходом датчика 3 глубины косяка рыбы. Выход блока 15 подключен к второму входу регулятора 14, а первый вход регулятора 14 соединен с выходом логического устройства 2. При этом выход регулятора 14 соединен с входом задатчика 13, а выход, последнего подключен к входу привода 12. Кроме того, в систему автоматического управления входит блок 17 ограничения усилий в ваерах, первый вход которого через датчик 18 усилий в йаерах (Тц) подключен к второму выходу привода 12 траловой лебедки, второй и третий входы блока 17 подключены соответственно к задатчикам 19 и 20 уставок максимальных (Т )и минимальных (Т - усилий ,в ваерах, а выход блока 17 соединен с ВУЮдом регулятора 5 скорости.Логическое устройство 2 содержит коммутирующий элемент 21 и устройство 22, управляющее коммутирующим элементом 21, которое подключено к первому входу логического устройства 2. Коммутирующий элемент 21 включен между вторым входом и выходом логического устройства 2. Первьй и второй входы логического устройства 2 соединены соответственно с выходами блоков 15 и 17 определения расчетной длины ваеров и ограничения усилий в ваерах. Логическое устройство 2 на основании поступающей на его первый вход информации в соответствии с принятым алгоритмом работы системы обеспечивает автоматическое включение и выключение цепи обратной связи по усилию в ваерах в контур регулирования глубины трала посредством изменения длины ваеров. Блок 15 определения расчетной длины ваеров реализует зависимость расчетной длины Цр ваеров в функции глубины погружения трала для номинальной скорости траления; Сигнал на выходе этого блока пропорционален разнице л L, между расчетной t(p и фактической L,p длинa в ваеров. На выходах блоков 9 и 17 ограничения мощности и усилий в ваерах появляются сигналы только тогда, когда мощность силовой установки (N ) или усилие в ваерах (Tg) Ьольше максимальных допустимых значе™ ma.,) или меньше минимальных (N. илиТ.), причем знаки выходных сигналов блоков 9 в первом и втором случаях противоположны. Работу автоматической системы наведения трала рассматриваем для режимов поъема и спуска трапа. При спуске трала, когда глубина рыбы h р больше глубины трала Ь-р , на выходе блока 6 появляется сигнал рассогласования 4Ь (Ър -li . Управляющий сигнал jb поступает на регулятор 5, который, воздействуя на силовую установку 4, стремится уменьшить скорость хода судна до минимально допустимой скорости траления, контролируемой блоком 9, в котором сравнивается сигнал N да чика 8 мощности силовой установки с сигналом задатчика 11 минимальной мощности . Одновременно с этим сигналы о глубине рыбы hp и длине вытравленных ваеров L,,, поступают с датчиков 3 и 16 на блок 15, на вько де которого появляется сигнал, пропорциональный требуемому изменению рабочей длины ваеров на величину +/S Управляющий сигнал -ЬЛЬ поступает на регулятор 14 длины ваеров, который через задатчик 13 интенсивности включает и плавно разгоняет привод на стравливание ваеров. Кроме того, сигнал +/J L поступает также на вход управляющего устройства 22, входяще го в состав логического устройства 2. Устройство 22 включает коммут ционный элемент 21, тем самым подключен ко входурегулятора 14 выход блока 17. При стравлении ваеров уси лие в них падает и, если оно окажет ся меньше уставкиТ. , сигнал с выхода блока 17 воздействует на регулятор 5, увеличивая скорость хода судна, что в конечном итоге ограничивает минимальное значение усилия в ваерах величиной Т,, определяемо уставкой задатчика 20 минимального усилия. Указанное выше увеличение.скорое ти хода судна приводит в переходном процессе к увеличению загрузки силовой установки 5, и, если мощ95N силовой установки окажется больше уставки , сигнал с выхода блока 9 воздействует на регулятор 5 таким образом, чтобы загрузка силовой установки не превышала максимально допустимую ,jj. Трал опускается за счет стравливания ваеров, а скорость хода судна поддерживается такой, чтобы усилие в ваерак было не меньше уставки Т . После вытрав ливания. необходимой величины AL, регулятор 14 через задатчик 13 плавно останавливает привод 12. Поскольку прекращение травления ваеров вызывает возрастание в них усилия, действие ограничения по минимальному усилию с выхода блока 17 на вход регулятора 5 уменьшается. По этой причине под действием управляющего сигнала скорость хода судна уменьшается и за счет этого продолжается опускание трала до выхода его на заданный горизонт. Окончанию переходного процесса соответствуетЛЬ О, длина ваеров равна расчетной Цр , а скорость травления номинальной. При подъеме трала, когда глубина косяка рыбы fip меньше глубины трала Ь- , на выходе блока 6 появляется сигнал рассогласования -d Ь (Ьр-Ьр , а на вькоде блока 15 - управляющий сигнал - ЛЬ (Lp- Lg), пропорциональный требуемому изменению рабочей длины ваеров. Под действием сигнала Ah регулятор 5 стремится увеличить упор силовой установки 4 и, следовательно, скорость судна. Интенсивность разгона контролируется блоком 9, в котором сравнивается сигнал N датчика 8 мощности силовой установки с сигналом задатчика 10 максимальной мощности . Одновременно с этим сигнал - дЦ поступает на регулятор 14 длины ваеров, который через задатчик 13 интенсивности включает и плавно разгоняет привод 12 на выбирании ваеров. Кроме того, сигнал --ДЬ поступает также на вход управляющего устройства 22, которое при этом, включая коммутирующий элемент 21, подключает к входу регулятора 14 выход .блока 17. При выбирании ваеров усилие в них возрастает и, если оно окажется больше уставкиt j.j, сигнал с выхода блока 17 воздействует на регулятор 5, уменьшая скорость хода судна, что в конечном итоге ограничиваусилия в ет максимальное значение ., определяемой ваерах величиной Т уставкой задатчика 1 I максимального усилия. Указанное выше уменьшение скорос ти судна приводит в переходном процессе к уменьшению загрузки силовой установки 4 и, если мощность N силовой установки окажется меньше уставки сигнал с выхода блока 9 воздействует на регулятор 5 таким образом, чтобы загрузка силовой установки не была меньше минимально допустимой М.„. Трал поднимается за счет выбирания ваеров, а скорость хода судна поддерживается такой, чтобы усилие в ваерах было не больше уставкиТ .. После вытравливания необходимой величины 4L регулятор 14 через задатчик 13 плавно останавливает привод 12. Поскольку прекращение вы бирания ваеров вызывает уменьшение в них усилия, действие ограничения по максимальному усилию с выхода блока 17 на вход регулятора 5 умень шается. По-этой причине под действием управляющего сигнала дЬ скорость судна увеличивается и за счет этого продолжается подъем трапа до выхода его на заданный горизонт, Окончанию переходного процесса, так же как и при спуске трала, соответствует ДЬ О, длина ваеров равна расчетной Lp , а скорость траленияноминальной. Защите привода 12 и ваеров от перегрузки как при подъеме, так и при спуске трала служит и связь с выхода блока 17 через коммутирующий элемент 21 на первый вход регулятора 14 действующая только при ДС 0. Если во время переходного процесса из-за инерционности судна усилие в ваерах все же станет больше или меньше Т. , то указанная вьш1е связь воздействует на регулятор 14 и изменяет необходимым образом скорость траления или выбирания ваеров, обеспечивая в любых режимах вьтолнение условия Т. Изобретение обеспечивает умёньшение шума судна, при этом экономический эффект составляет не менее 25 тыс. руб. в год на одно судно.
чТЛ
TMUH
i&L
/j
II
/
21
13
4/f
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления орудием лова | 1975 |
|
SU644432A1 |
| Устройство для наведения разноглубинного трала на глубину залегания косяка | 1975 |
|
SU728809A1 |
| Устройство управления пелагическим тралом | 1983 |
|
SU1194345A1 |
| Система управления главными двигателями судовой силовой установки и винтом регулируемого шага | 1981 |
|
SU990587A2 |
| Устройство для определения изменения длины ваеров | 1983 |
|
SU1250233A1 |
| Радиолокационный тренажер | 1980 |
|
SU875437A1 |
| Тренажер судоводителя | 1978 |
|
SU696522A2 |
| Распорная траловая доска | 1983 |
|
SU1143365A1 |
| Судовая энергетическая установка | 1977 |
|
SU637299A1 |
| Трал для лова рыбы /его варианты/ | 1984 |
|
SU1248581A1 |
СИСТЕМА УПРАВЛЕНИЯ ОРУДИЕМ ЛОВА, содержащая комплекс судно-ваер-трал, связанный посредством датчика глубины трала с блоком суммирования, к второму входу которого подключен датчик глубины косяка рыбы, подсоединенный к блоку определения расчетной длины ваеров, контур регулирования глубины трапа, включающий главную силовую установку, соединенную с первым входом регулятора скорости судна,через последовательно связанные датчик мощности главной силовой установки и блок ограничения мощности, включающий задатчик уставок максимальной мощности главной силовой установки, логическое устройство и контур регулирования глубины трапа посредством изменения длины ваеров, содержащий датчики рабочей длины вытравленных ваеров и усилий в ваерах, подключенные к логическому устройству соответственно через блок определения расчетной длины ваеров и блок ограничения усилий в ваерах, включающий задатчик максимальных усилий, и регулятор длины ваеров, к входу которого подключено логическое устройство, а выход связан с комплексом судно-ваер-трал через привод траловой лебедки, отличающаяся тем, что,с целью повьшения точности, она снабжена задатчиками уставок минимальной мощности i силовой установки и минимальных усилий в ваерах и задатчиком интенсив(Л ности пуска и остановки привода траловой лебедки, при этом последний связан с выходом регулятора длины ваеров и входом привода траловой лебедки, задатчики уставок минимальной мощности силовой установки и мио 00нимальных усилий в ваерах подключены . соответственно к блокам ограниче;ния со мощности и усилий в ваерах, выход блока суммирования подключен к :О рому входу регулятора скорости судна, к третьему входу которого подсоедиСЛ нен блок ограничения усилий в ваерах, а блок ограничения усилий в ваерах связан с вторым входом регулятора длины ваеров.
-fllp
-с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для разборки катков трактора | 1987 |
|
SU1488178A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления орудием лова | 1975 |
|
SU644432A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
