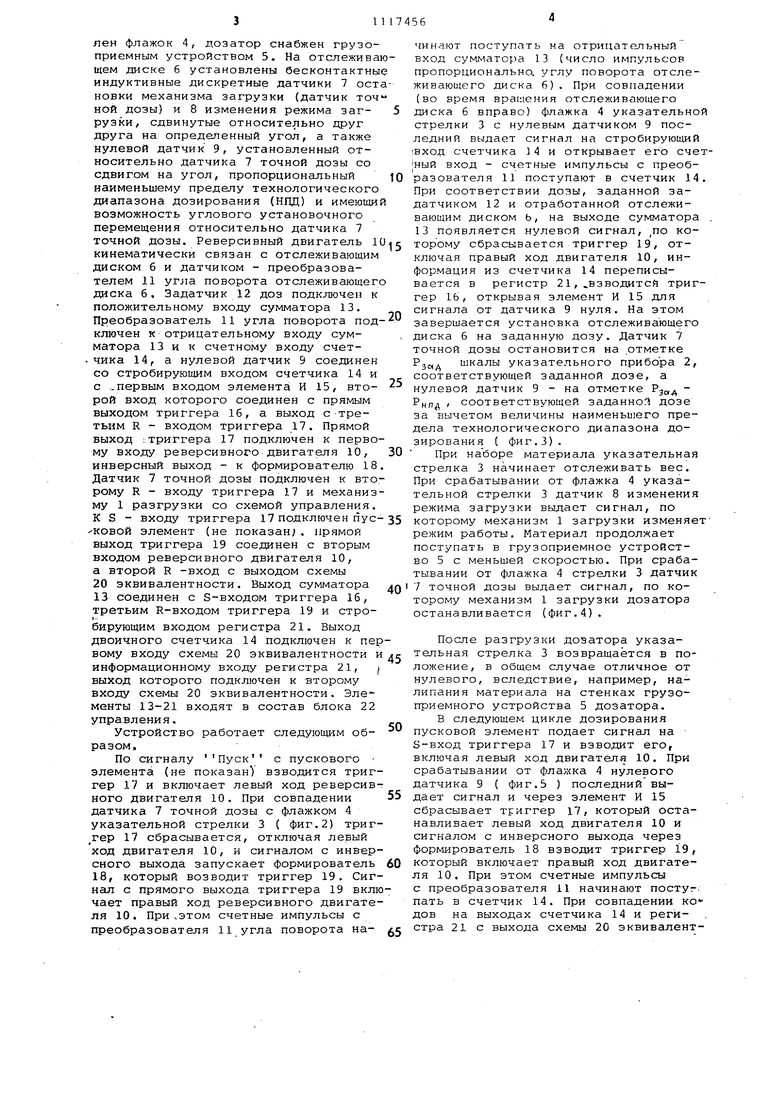
Изобретение относится к весоизмерительной технике и может быть исполь зовано для автоматического весового порционного многокомпонентного дозирования жидких и сыпучих материалов в литейньдх цехах на установках для приготовления формовочной и стержневой смесей/ а также в химической, пищевой, строительной и других отраслях промышленности, Известно устройство дозирования, содержащее циферблатный весоизмерительный прибор, включающий указател ную стрелку с двумя флажками разной длины, датчики положения, задающую стрелку, двигатель, кинематически связанный с задающейстрелкой, датчик преобразователь угла поворота задающей стрелки, программный блок/ подключенный к углу включения двига теля, а также два логических элемен И, инвертор и ячейку памяти Г-Т-} Известное устройство имеет низку производительность дозирования, обу ловленную длительным временем установки и отслеживания дозы. Наиболее близким по технической сущности к предлагаемому является дозатор, содержащий грузоприемное устройство, механизм загрузки со схемой управления г циферблатный ука зательный прибор с отслеживающим диском, на котором закреплены датчи нулевого положения диска, датчик из менения режима загрузки, выход которого связан с первым входом механизма загрузки,- и датчик точной уст новки дозы, флажок, закрепленный на стрелке циферблатного прибора, реверсивный двигатель, кинематическ связанный с отслеживающим диском и преобразователем угла поворота отележиБающего диска в число-импульсн код, задатчик доз и блок управления 2. Недостатком известного устройства является низкая точность произ водительности дозирования, обусловленная конечным числом дискретных датчиков положения и значительной величиной интервала времени, затрачиваемого на установку отслежи- . вающего диска на заданную дозу. Цель изобретения - повышение производительности и точности дозирования за счет уменьшения времени установки дозы и повьйиение. точности измерений. Поставленная цель достигается тем, что в дозаторе, содержащем гру зоприемное устройство, механизм загрузки со схемой управления, циферблатный указательный прибор с отслеживающим диском, на котором закреплены датчик нулевого положения диска, датчик изменения режима. загрузки, выход которого связан с первым входом механизма загрузки, и датчик точной установки дозы, флажок, закрепленный на стрелке циферблатного прибора, реверсивный двигатель, кинематически связанный с отслеживающим диском и преобразователем угла поворота отслеживающего даска Е число-импульсйый код, задатчик доз и блок управления, датчик нулевого положения смещен относительно датчика точной установки дозы на угол, соответствующий углу поворота циферблатного прибора при взвешивании дозы, равной наименьшему пределу технологического диапазона дозирования, а блок управления дозатора содержит сумматор,три триггера,двоичный счетчик, регистр, формирователь, схему эквивалентности и элемент И, причем выход преобразователя угла поворота соединен с информационным входом двоичного счет-, чика и отрицательным входом сумматора, положительный вход которого соединен с выходом задачика доз, выход датчика нулевого положения диска соединен со стробирующим входом двоичного счетчика и с первым входом элемента И, второй вход которого соединен с прямым выходом первого триггера, а выход элемента И соединен с третьим входом второго триггера, второй вход которого соединен с вторым входом механизма загрузки я выходом датчика точной установки дозы, прямой выход : второго триггера соединен с первым входом реверсивного двигателя, а инверсный выход второго триггера через формирователь соединен с первым входом третьего триггера, прямой выход которого сое«: динен с вторым входом реверсивного двигателя, второй вход третьего триггера соединен с выходом схемы эквивалентности, первый вход которой соединен с выходом двоичного счетчик и. информсщионным входом регистра, второй вход схемы эквивалентности соединен с выходом регистра,, стробирующий вход которого соединен с выходом cyiiiMciTopa, третьим входом третьего триггера и входом первого триггера. На фиг.1 показана структурная схема дозатора; . 2 - положение отслеживающего диска в начальный период цикла дозирования;на фиг.З то же во время установки заданной дозы; на фиг.4 - то же в период взвешивания материала; на фиг.З - то же в период установки заданной дозы с учетом изменения величины тарной нагрузки; на фиг,б - то же по оконча-j НИИ установки заданной дозы с учетом изменения величины тарной нагрузки. Устройство включает в себя механизм 1 загрузки дозатора, циферблатный указательный прибор 2 с указательной стрелкой 3, на которой установлен флажок 4, дозатор снабжен грузоприемным устройством 5. На отслежива щем диске 6 установлены бесконтактны индуктивные дискретные датчики 7 ост новки механизма загрузки (датчик точ ной дозы) и 8 изменения режима загрузки, сдвинутые относительно друг друга на определенный угол, а также нулевой датчик 9, установленный относительно датчика 7 точной дозы со сдвигом на угол, пропорциональный наименьшему пределу технологического диапазона дозирования (НПД) и имеющи возможность углового установочного перемещения относительно датчика 7 точной дозы. Реверсивный двигатель 1 кинематически связан с отслеживающим диском 6 и датчиком - преобразователем 11 угла поворота отслеживающег диска 6. Задатчик 12 доз подключен к положительному входу сумматора 13. Преобразователь 11 угла поворота под ключен к отрицательному входу сумматора 13 и к счетному входу счетчика 14, а нулевой датчик 9 соединен со стробирующим входом счетчика 14 и с ..первым входом элемента И 15, второй вход которого соединен с прямым выходом триггера 16, а выход с третьим R - входом триггера 17. Прямой выход :триггера 17 подключен к перво му входу реверсивного двигателя 10, инверсный выход - к формирователю 18 Датчик 7 точной дозы подключен к вто рому R - входу триггера 17 и механиз му 1 разгрузки со схемой управления. К S - входу триггера 17 подключен пусКовой элемент (не показан;. прямой выход триггера 19 соединен с вторым входом реверсивного двигателя 10, а второй R -вход с выходом схемы 20 эквивалентности. Выход сумматора 13 соединен с S-входом триггера 16, третьим R-входом триггера 19 и стробирующим входом регистра 21. Выход двоичного счетчика 14 подключен к пер вому входу схемы 20 эквивалентности и информационному входу регистра 21, j выход которого подключен к второму входу схемы 20 эквивалентности. Эле менты 13-21 входят в состав блока 22 управления. Устройство работает следующим образом. По сигналу Пуск с пускового элемента (не показан) взводится триггер IV и включает левый ход реверсивного двигателя 10. При совпадении датчика 7 точной дозы с флажком 4 указательной стрелки 3 ( фиг.2) триг гер 17 сбрасывается, отключая левый ход двигателя 10, и сигналом с инверсного выхода запускает формирователь 18, который возводит триггер 19. Сигнал с прямого выхода триггера 19 вклю чает правый ход реверсивного двигателя 10. Приватом счетные импульсы с преобразователя 11 угла поворота начинагот поступать на отрицатв-пьный вход сумматора 13 (число импульсов пропорционально, углу поворота отслеживающего диска 6). При совпадении (во время вращения отслеживающего диска б вправо) флажка 4 указательной стрелки 3 с нулевым датчиком 9 последний выдает сигнал на стробирующий вход счетчика 14 и открывает его счет ный вход - счетные импульсы с преобразователя 11 поступают в счетчик 14. При соответствии дозы, заданной задатчиком 12 и отработанной отслеживающим диском Ь, на выходе сумматора , 13 появляется нулевой сигнал, ,по которому сбрасывается триггер 19, отключая правый ход двигателя 10, информация из счетчика 14 переписывается в регистр 21,взводитсй триггер 16, открывая элемент И 15 для сигнала от датчика 9 нуля. На этом завершается установка отслеживающего диска 6 на заданную дозу. Датчик 7 точной дозы остановится на .отметке РЗДД шкалы указательного прибора 2, соответствующей заданной дозе, а нулевой датчик 9 - на отметке РЗ„Д РНЛД ( соответствующей заданной дозе за вычетом величины наименьшего предела технологического диапазона дозирования ( фиг.З). При наЪоре материала указательная стрелка 3 начинает отслеживать вес. При срабатывании от флажка 4 указательной стрелки 3 датчик 8 изменения режима загрузки выдает сигнал, по которому механизм 1 загрузки изменяет режим работы. Материал продолжает поступать в грузоприемное устройство 5 с меньшей скоростью. При срабатывании от флажка 4 стрелки 3 датчик 7 точной дозы выдает сигнал, по которому механизм 1 загрузки дозатора останавливается (фиг.4). После разгрузки дозатора указательная стрелка 3 возвращается в положение, в общем случае отличное от нулевого, вследствие, например, налипания материала на стенках грузоприемного устройства 5 дозатора. В следующем цикле дозирования пусковой элемент подает сигнал на S-вход триггера 17 и взводит его, включая левый ход двигателя 10. При срабатывании от флажка 4 нулевого датчика 9 ( фиг.5 ) последний выдает сигнал и через элемент И 15 сбрасывает триггер 17, который останавливает левый ход двигателя 10 и сигналом с инверсного выхода через формирователь 18 взводит триггер 19, который включает правый ход двигателя 10. При этом счетные импульсы с преобразователя 11 начинают постуг, пать в счетчик 14. При совпадении на выходах счетчика 14 и регистра 21 с выхода схемы 20 эквивалентности поступает сигнал, сбрасывающий триггер) 19, который отключает правый ход двигателя 10. , Нулевой датчик 9 останавливается на отметке шкалы - Р«пд ост (Рр - величина невыгруженного остат ка материала) , а датчик 7 точной дозы на отметке Р.чад - ст (фиг. б) , соответствующей заданной дозе с учетом веса невыгруженного материала. Производится набор материала и цикл дозирования повторяется. Предлагаемая конструкция дозатора позволя€ Т повысить точность дозирования на 20-30%, а также обеспечивает соблюдение рецептурной смеси при увеличении производительности системы дозирования в целом.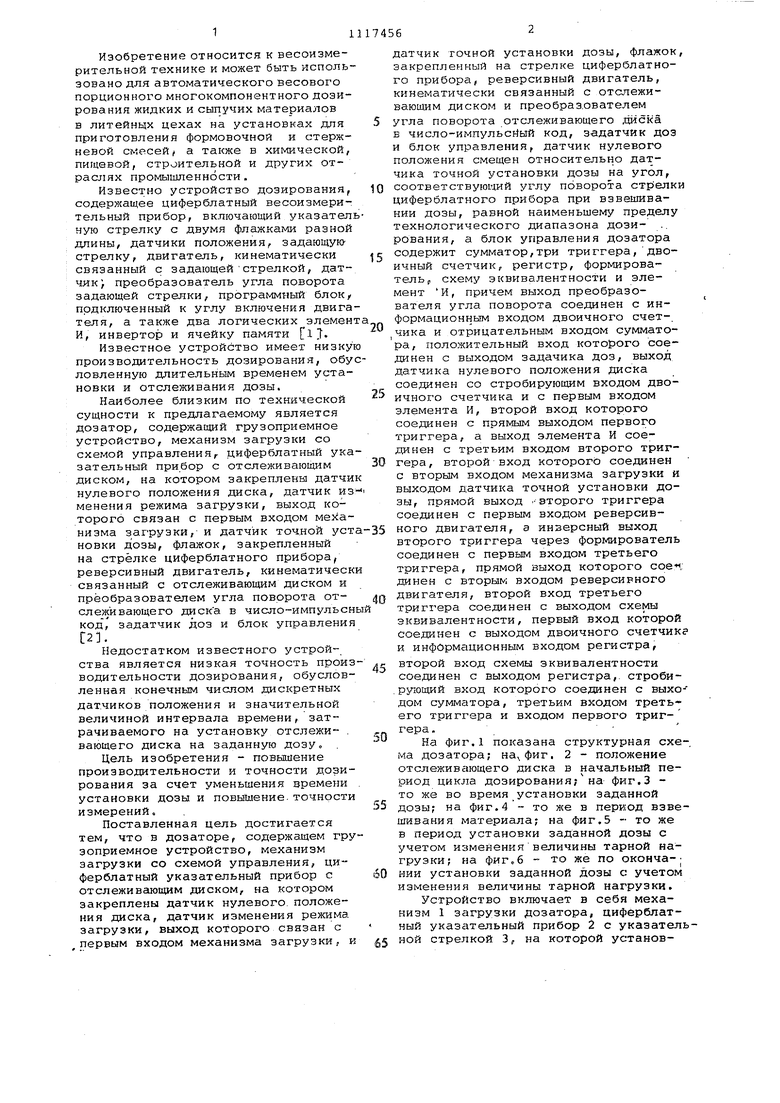
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления весовым порционным дозированием | 1975 |
|
SU566143A1 |
| Устройство управления механизмом загрузки дозатора | 1976 |
|
SU602788A1 |
| Автоматический дозатор | 1976 |
|
SU591717A1 |
| Устройство для измерения количества материала, сдозированного порционным дозатором | 1975 |
|
SU546790A1 |
| Устройство учета расхода материала при порционном дозировании | 1982 |
|
SU1068726A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| Цифровое устройство управление весовым дозированием | 1980 |
|
SU866418A1 |
| Устройство для весового порционного дозирования | 1978 |
|
SU697832A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Устройство автоматического управления весовым порционным дозатором | 1987 |
|
SU1495757A1 |
ДОЗАТОР, содержащий грузоприемное устройство, механизм загрузки со схемой управления, циферблатный указательный прибор, с отслеживающим диском, на котором закреплены датчик нулевого положения диска, датчик изменения режима загрузки, выход которого связан с первым входом механизма загрузки, и датчик точной установки дозы, флажок, . закрепленный на стрелке Циферблатного прибора, реверсивный двигатель, кинематически связанный с отслеживающим диском и преобразователем угла поворота отслеживающего диска в число-импульсный код, задатчик доз и блок управления, отличаю-, щ и и с я тем, что, с целью повышения производительности и точности дозирования за счет уменьшения времени установки дозы и повышения точности измерений, датчик нулевого положения смещен относительно датчика точной установки дозы на угол, соответствующий углу поворота стрелки циферблатного прибора при взвешивании дозы, равной наименьшему пределу технологического диапазона дозирования, а блок управления дозатора содержит сумматор, три триг гера, двоичный счетчик, регистр, формирователь, схему эквивалентности и элемент И, причем выход преобразователя угла г оворота соединен с информационным входом двоичного счетчика и отрицательным входом сумматора, положительный вход которого соединен с выходом задатчика доз, выход датчика нулевого положения дне ка соединен со стробирующим входом двоичного счетчика и с первым входом элемента И, второй вход которого (Л соединен с прямым выходом первого триггера, а выход элемента И соединен, с третьим входом второго триггера, второй- вход которого соединен с вторым входом механизма загрузки и выходом датчика точной установки дозы, прямой выход второго триггера соединение первым входом реверсивного; двигателя, а инверсный выход второго триггера через формирователь соединен с первым входом третьего триг гера, прямой выход которого соединен со вторым входом реверсивного ел двигателя, второй вход третьего триггера соединен с выходом схемы эквивалентности , первый вход которой - -О) соединен с выходом двоичного счетчика и информационным входом регистра, второй вход схемы эквива.пент- ности соединен с выходом регистра, стробирующий вход которого соединен с выходом сумматора, третьим входом третьего триггера и входом первого триггера.
7 Q
Рзад+Рост 1
8
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления весовым порционным дозированием | 1975 |
|
SU566143A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Карпин Е.Б | |||
| Средства автоматизации для измерения и дозирования массы | |||
| М., Машиностроение,1971 с.350-353 (прототип) | |||
