Изобретение относится к весоизмерительной технике, в частности к устройствам дозирования сыпучих ма.териалов, например приприготовлении ётонных и других смесей на бетоносмесительных узлах предприятий строительной индустрии.
Известно устройство управления весовым порционным дозатором, содержащее сельсинг-датчик, ротор которого связан с рсью стрелки циферблатного указателя дозатора,залатчик порции и узел управления Г.
В этом устройстве отвешивание заданной дозы компонента осуществляется в два этапа; до порога грубого веса и от порога грубого веса до точного веса, причем дрвешиваиие от порога грубого веса производится многократными порциями. Двухстадийное дозирование в бодьшинстве случаев не обеспечивает требуемой точности, удлиняет время цикла дозирования, вызывает повышенный износ оборудования и, что также существенно, отрицатедьно сказывается на психологии обслуживающего персонала.
. Наиболее близким к предлагаемому по технической сущности является устройство управления весовым порционным дозатором, содержащее датчик веса, подключенный к входам двух формирователей остроконечных импульсов, выходы которых соединены с одними входами элементов сравнения, другие входы которых соединены с выходами формирователей прямоугольных икятульсов, подключенных; к источнику питания, триггер дозы, .входы которого подключены к выходам элементов сравнения, а выходы - к индикатору текущего веса и к преобразователю последовательности прямоугольных импульсов в цифровой код, вычислитель скорости набора веса, подключенный через первый цифро-аналоговый, преобразователь к одному входу сумматора:, к другому входу которого подключен задатчик порции., а к выходу - компаратор, соединенный с выходом второго цифро-аналогового преобразователя и с входом блока управления Г2.
В прототипе наиболее достоверные значения статиЗескрго веса груза опеделяют по значениям случайного сигнала в моменты времени, соотйетствуюидаге экстремумам скорости нестационарного случайного процесса. Недостаток стройства сдстоит в малой плотности получае«уых точек статической характеристики, отстоящих друг от друра на полупериод колебательной составляю- щей сигнала. Экстраполирование сигнала между точками приводит к зарине.е непредсказуемым ошибкам в силу случайного характера фильтруемого сигнала. Другой недостаток обнаруживается в случае, когда выходной сигнал датчика не содержит регулярной колебательной помехи.и не представля ется возможным выявлять экстремальные значения скорости процесса путем дифференцирования сигнала датчика.
Цель изобретения - повышение точности дозирования за счет прогнозирования характера поведения устройства на всём интервале набора веса.
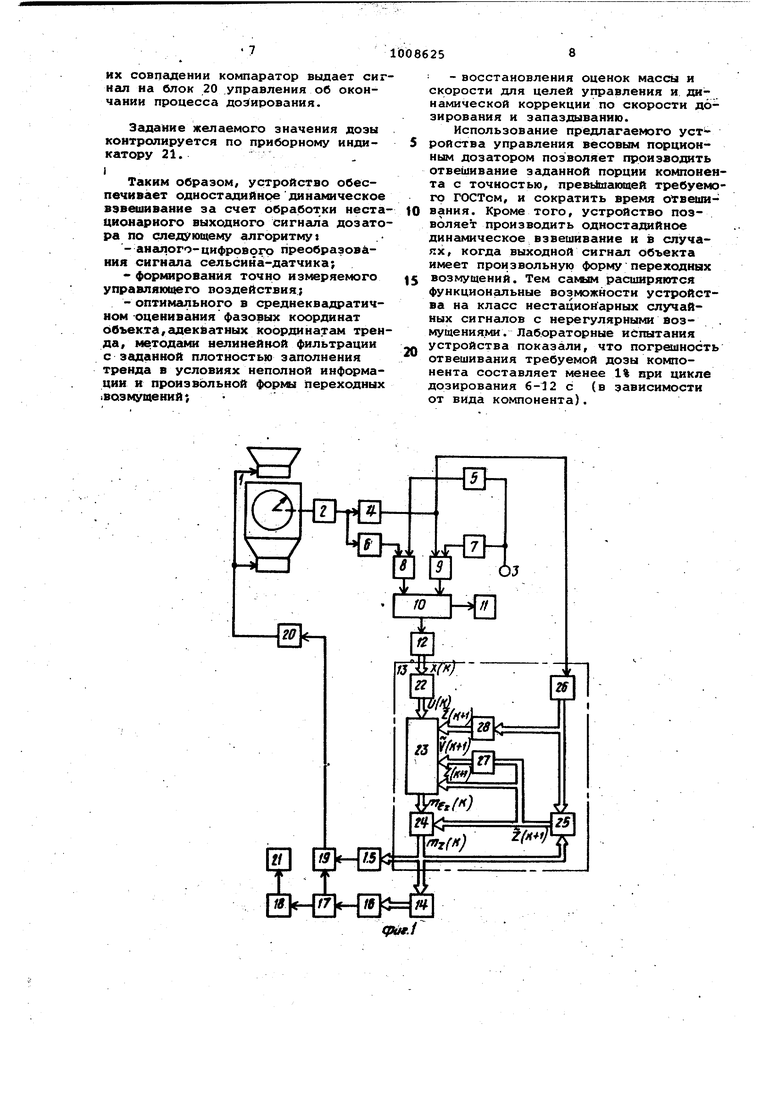
Поставленная цель достигается тем, что в устройство управления весовым порционным дозатором, содержащее датчик веса, подключенный к входам двух формирователей остроконечных импульсов, выходы которых соединены с одними входами элементов сравнения, другие входы которых соединены с выходами формирователей прямоугольных импульсов, подключенных к источнику питания, триггер дозы, входы которого подключены к выходам элементов сравнения, а выходы - к индикатору текущего веса и к преобразователю последовательности прямо- угольных импульсов в цифровой код, вычислитель скорости набора веса, подключенный через первый цифроаналоговый преобразователь к одному входу сумматора, к другому входу которого подключен задатчик порции, а к выходу - компаратор, соединенный с выходом второго цифро-аналогового преобразователя и с входом блока управления, введены последовательно соединенные формирователь управляющего воздействия, вычислитель оценки ошибки измерения фазовой координаты и вычислитель оценки фазовой координаты, формирователи априорного значения фазовой координаты и прЪгнозируемого приращения фазовой координаты, вычислители скорости присоединения добавочных масс и прогнозируемой скорости приращения фазовой координаты, причем выход преобразователя последовательности прямоугольных импульсов в цифровой код-подключен к входу формирователя управляющего воздействия, выход вычислителя оценки фазовой координаты соединен с входом второго цифро-аналогового преобразователя, с вычислителем скорости набора веса и формирователем априорного значения фазовой координаты, выход которого соединен с вычилителем оценки фазовой координаты, с вычислителем оценки ошибки измерения фазовой координаты и с .вычислителем скорости присоединения добавочных масс, выход которого и выход вычислителя прогнозируемой скорости приращения фазовой координаты связаны с другими входами вычислителя оценки ошибки измерения фазовой координаты, а входы вычислителя прогнозируемой скорости приращения фазовой координаты и .формирователя априорного значения фазовой координаты соединены с выходом формирователя прог нозируемого приращения фазовой коор динаты, вход которого соединен с . выходом одного из формирователей остроконечных импульсов. На фиг, 1 показано устройство, структурная схема;на фиг. 2 - граф ки, изображающие изменение состояния до.затора при динакмческом взвешивании.. Устройство содержит дозатор 1, ось стрелки которого связана с роi;тором сельсина-датчика 2, источник рпорного питания, формирователь 4 остроконечных и формирователь 5 пря моугольных импульсов, формирователь остроконечных импульсов и формирова тель 7 прямоугольных импульсов, свя занные через элементы 8 и 9 сравнения с триггером 10 дозы, индикатор 11 текущей массы, преобразователь 12 последовательности прямоуго ных импульсов в цифровой код, связанный с выходом триггера 10, блок 13 выявления тренда нестационарного случайного сигнала, вычислитель 14 скорости, цифро-аналоговые преобра эователи (ЦАП) 15 и 16, сумматор 17 эадатчик 18 порций, компаратор 19 напряжений, блок 20 управления и индикатор 21 задания дозы. Блок 13 выявления тренда содержит формирователь 22 управляющего воздействия, вычислитель 23 оценки ошибки измерения фазовой координаты (оптимальный нелинейный фильтр), вычисли тель 24 оценки фазовой координаты, формирователь 25 априорного значения фазовой координаты, формирова тель 26 прогнозируемого приращения фазовой координаты, вычислитель 27 скорости присоединения добавочных масс и вычислитель 28 прогнозируемой скорости приращения фазовой координаты. Устройство работает следующим образом. Угловое положение стрелки индикатора 1 дозы преобразуется сельсин датчиком 2, возбуждаемым от источни ка 3 опорного питания в напряжение, фаза которого пропорциональна углу првброта стрелки индикатора дозы. (Сельсин работает в реямме многофазного индукционного фазовращателя. Формирователь 4 образует последо ватёльность остроконечнь1х импульсов с фазовым сдвигом, определяемым азой напряжения однофазной обмотки рельсина-датчика 2 относительно фаз (источника 3 опорного питания. Фор- мирователь 6 образует последователь ность остроконечных импульсов, имею щих фазу напряжения источника опорного питания. Синхроннос формирователями 4 и 6 формирователи 5 и 7 выдают прямоугольные блокировочные импульсы по массе и опоре соответственно, которые управляют элементами 8 и 9 сравнения. Сигналы элементов 8 и 9 сравнения подаются «а входы триггера 10 дозы, который формирует последовательность прямоугольных импульсов с длительностью, пропорциональной текущему знач,ению координаты дозатора {положени1б указательной стрелки дозатора). Прямоугольные импульсы поступают на индикатор 11 текущих значений массы и в преобразователь 12 импуль-г сов в цифровой двоично-десятичный код. в блоке 13 производится выявление в коде координат тренда Z(t) нестационарного случайного Сигнала x(t) по сигналам оптимальных в среднеквадратичном оценок фазовых координат динамического объекта т (дозатора) с дискретностью, например 20 мс (фиг. 2). Оценивание фазовых координат весового порционного дозатора, представляющего соббй нестационарное колебательное слабодемпфированное звено, производится в условиях неполной информации и произвольной форме переходных возмущений с применением нелинейной фильтрации сигналов. Оценка т фазовой координаты Z формируется вычислителем 24 по алгоритму:т2.(К) Z(K)-mp (К), cj где Z(K)- априорное значение фазовой координаты; mg (К) - оценка ошибки измерения 2 фазовой координаты; К индекс, указывакмдий на дискретные моменты времени. Сигналы координаты Z(K+1) снимаются с выхода элемента 25, формирующего априорное значение фазовых координат в соответствии с алгоритмомz(K+1) m(K)+A2(+) , где AZ(K+1) - прогнозируемые приращения фазовой координаты, снимаег1«ле с выхода формирователя 26. Таким образом, в описанных алгоритмах используется стратегия разомкнутого типа (метод прицела), предполагающая введение элементов предвидения поведения систе1«л на всем интервале движения. Применение .таких (алгоритмов, диктуется самой сутью рассматриваемой задачи, которая не имеет решения без прогнозирования дальнейшего хода процесса на основе
измерения, проведенного на предыдущем шаге.
Оптимальная в среднеквадратичном оценка ошибкиi измерения фазовой координаты те снимается с выхода вычислителя 23, представляющего собо нелинейный цифровой фильтр.
Ускорение G и управляющее воздействие и определяется соотношеd2x
Йиями; G dUr - 9.
J у
f jji « IT
aQX, где g - ускорение силы тяжести; тд - постоянная составляющая приведенной массы системы Эр, конструкционные коэффициенты. Координаты тренда Z и скорость присоединения добавочных масс до ;зируемого компонента V могут быть измерены лишь с помехами Су: Z + вг 7 V t где V . V(Z)(l- f-) Н - максимальное значение высот свободного падения; VP - начальная скорость свободно падения; Zfn - максимальная отвешиваемая масса. Помеха в измерениях тренда дается дифференцируемым двумерным векторным процессом с компонентами (Ej, 2), допускающими представлеV 2 2 .Помеха в измерениях скорости Sv представляется широкополосным случ ным процессом, аппроксимируемым белым шумом v Rib где у(i 1,2,3) - независимые слу чайные процессы типа белого шума М.0, ,0(1#5),)(ит)-с/ХП М - опедатор математического ожидания; Stt; - символ Кронекера; 1/Т - постоянная интегрирования В.В2, R - независящие от фазовых ко динат функции времени. Входящие в уравнения для элемен тов ковариационной матрицы ошибок
фильтрации j, j-,2, J2.2 коэффициенты , Л учитывают влияние отброшенных при линеаризации членов.
Решение систем дифференциальных уравнений производится одним из численных методов, позволяющих применить вычислительное устрЬйство (линейный цифровой фильтр), работа которого описывается линейным разностным уравнением вида
N
М
.-Цъ.
п-Ц«Ип-.
i n-i
-1 где Xj, у„ - входной и выходной сигналы;. а, Ц - коэффициенты. Таким образом, для вычисления значений выходного сигнала (оценки оши§ ки измерения фазовой координаты) достаточно использовать арифметические операции - умножение, сложение и вычитание, реализуемое с помощью устройства, содержащих приемные регистры, регистры памяти, сумматоры, регистры сдвига. Регистры могут быть регшизованы, например на триггерах типа К155ТМ2,. сумматоры - на интегральных микросхемах типа К155ИМЗ и К155ЛП5. Считывание информации производится по команде с блока 4. Вычислительный алгоритм оптимальной оценки координаты тренда без затруднений может быть реализован также на микропроцессорных наборах, дополненных постоянным запоминающим устройством для хранения прогрс1ммы фильтра и его коэффициентов,оперативным запоминающим устройствомдля хранения значений входного и выходного сигналов и промежуточных переменных. Для целей управления дозированием информация о массе и скорости процесса, получаемая в цифровом коде с выходов блока выявления тренда 13 и вычислителя скорости 14, восстанавливается ЦАП 15 и 16. Напряжение с ЦАП 16 в форме ступенчато-экстраполированного сигнала подается на сумматор 17, последний связан также с задатчиком 18 порций . В результате с выхода сумматора 17 поступает аналоговый .сигнал управления, откорректированный по динамике процесса (скорости) и по высоте свободно падающего столба дозируемого компонента (по запаздаванию в системе). Сумматор реализуется на обычных операционных усилителях, задатчик представляет собой резистор, включенный по потенциометрйческой схеме к источнику питания постоянного тока. Выходные сигналы ЦАП 15 и сумматора 17 сравниваются по уровням в. компараторе напряжений 19 и при их совпадении компаратор вьщает си нал на блок 20 управления об окончании процесса дозирования. Задание желаемого значения дозы контролируется по приборному индикатору 21. Таким образом, устройство обеспечивает одностадийноединёшическое взвешивание за счет обработки неста ционарного выходного сигнала дозато ра по следукнцему алгоритму: -анашого-цифрового преобразования сигнала сельсина-датчика; -формирования точно измеряемого управляющего воздействия; -оптимгшьного в среднеквадратичном-оценивания фазовых координат объекта,адекватных коордннатам трен да, методгми нелинейной фильтрации с заданной плотностью заполнения тренда в условиях неполной информации и произвольной Формы переходных возмущений; - восстановления оценок массы и скорости для целей управления и динамической коррекции по скорости дозирования и запаздыванию. Использование предлагаемого уст ройства управления весовым порционHbiM дозатором позволяет производить отвешивание заданной порции компонента с точностью, превьЬиакияей требуемого ГОСТом, и сократить время отвешивания. Кроме того, устройство позволяет производить одностадийное динамическое взвешивание и is случаях, когда выходной сигнал объекта имеет произвольную форму переходных возмущений. Тем санам расширяются функциональные возможности устройства на класс нестационарных случаЛных сигналов с нерегулярными возмущения.ми. Лабораторные испытания устройства показали, что погрешность отвешивания требуемой дозы компонента составляет менее 1% при цикле дозирования 6-12 с (в зависимости от вида компонента).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления весовым порционнымдОзАТОРОМ | 1979 |
|
SU836532A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| УСТРОЙСТВО ЧАСТОТНО-ВРЕМЕННОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2341892C2 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| Радиолиния, защищенная от несанкционированного доступа | 2023 |
|
RU2820855C1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2780810C1 |
| Устройство для управления весовым порционным дозатором | 1991 |
|
SU1830518A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |

: УСТРОЙСТВО УПРАВЛЕНИЯ ВЕСОВЫМ ПОРЦИОННЫМ ДОЗАТОРОМ, содержащее датчик веса, подключенный к входам двух формирователей остроконечных импульсов, выходы которых соединены с одними входами элементов сравнения, другие входы соединены с выходами формирователей прямоугольных импульсов, подключенных к источнику питания, триггер дозы, входы которых подключены к выходам элементов сравнения, а выходы - к индикатору текущего веса и к преобразователю последовательности прямоуголь ных импульсов в о цифровой код, вычислитель скорости набора,веса подключенный через первый цифро-аналоговый преобразователь к одному входу сумматора, к другому входу которого подключен задатчик порции, а к выходу - компаратор, соединенный с выходом второго цифро-аналогового преобразователя и с входом блока управления, отличающееся тем, что, с целью повышения точности дозирования за счет прогнозирования характера поведения устройства на всем интервале набора веса, в него введены последовательно соединенные формирователь управляющего воздействия, вычислитель оценки ошибки измерения фазовой координаты .и вычислитель оценки . фазовой координаты, формирователи априорного значения фазовой коорринаты и прогнозируемого приращения фазовой координаты, вычислители скорости присоединения добавочных масс и прогнозируемой скорости приращения фазовой координаты, причем выход преобразователя последовательности прямоугольных импульсов в цифровой код подключен к входу формирователя управляющего воздействия выход вычислителя оценки фазовой координаты .соединен с входом вто(Л рого цифро-аналогового преобразователя, с вычислителем скорости набора веса и с формирователем априорного значения фазовой координаты, выход которого соединен с вычислителем оценки фазовой координаты, с вычислителем оценки ошибки измерения фазовой координаты и с вычислителем скорости присоединения до.бавочных масс, выход которого и вход 00 вычислителя прогнозируемой скорости приращения.фазовой координаты о: связаны с другими входами вычислию ел ,теля оценки ошибки измерения фазовой координаты, а входы вь Числителя прогнозируемой скорости приращения фазовой координаты и формирователя априорного значения фазовой координаты соединены сшыходом формирователя прог нозируемого приращения фазовой координаты, вход которого соединен с выходом одного из формирователей остроконечных импульсов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления весовым порционным дозатором | 1975 |
|
SU523301A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления весовым порционнымдОзАТОРОМ | 1979 |
|
SU836532A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| : | |||
