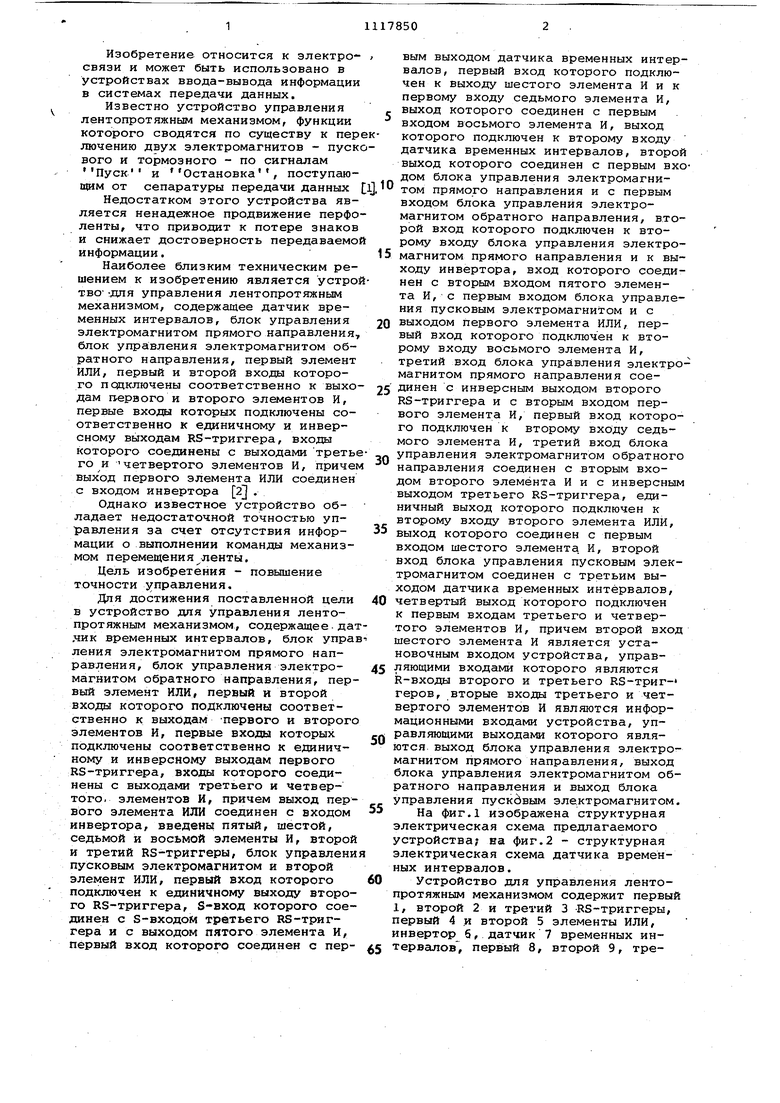
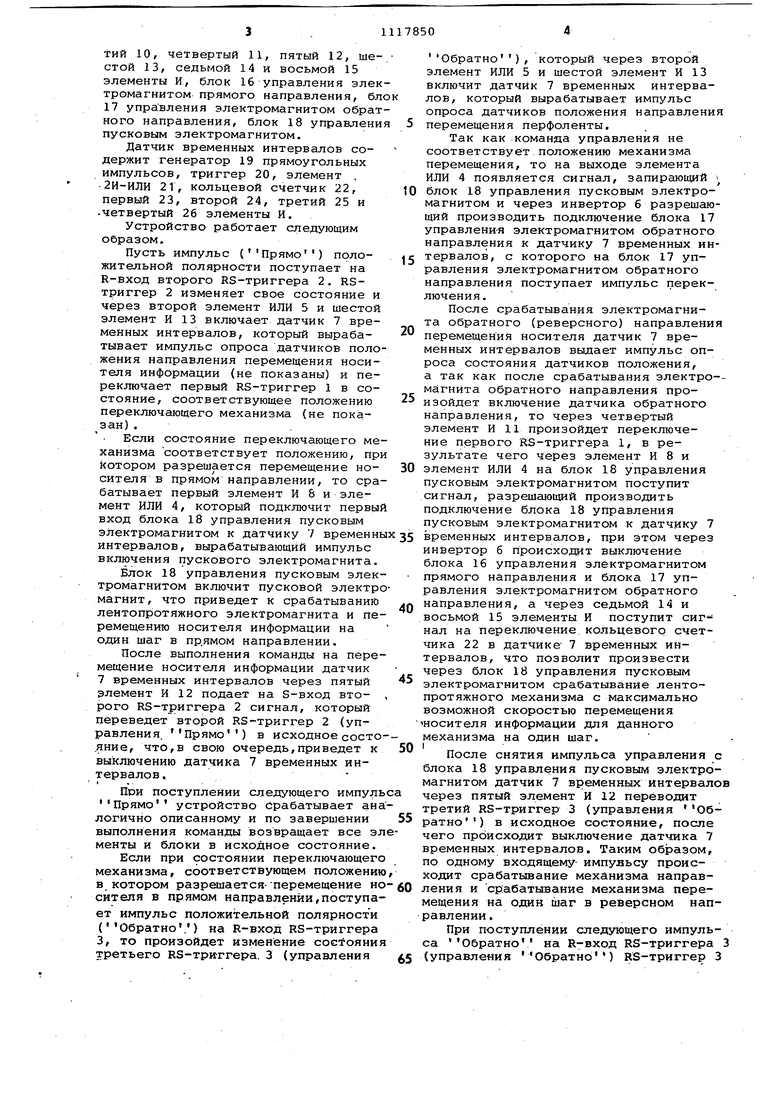
Изобретение относится к электросвязи и может быть использовано в устройствах ввода-вывода информации в системах передачи данных. Известно устройство управления лентопротяжньом механизмом, функции которого сводятся по существу к пер лючению двух электромагнитов - пуск вого и тормозного - по сигналам Пуск и Остановка, поступающим от сепаратуры передачи данных Недостатком этого устройства является ненадежное продвижение перфо ленты, что приводит к потере знаков и снижает достоверность передаваемо информации. Наиболее близким техническим решением к изобретению является устро тво -дня управления лентопротяжным механизмом, содержащее датчик временных интервалов, блок управления электромагнитом прямого направления блок управления электромагнитом обратного направления, первый элемент ИЛИ, первый и второй входы которого подключены соответственно к выхо дам первого и второго элементов И, первые входы которых подключены соответственно к единичному и инверсному выходам RS-триггера, входы которого соединены с выходами треть го и четвертого элементов И, приче выхЪд первого элемента ИЛИ соединен с входом инвертора 2j . Однако известное устройство обладает недостаточной точностью управления за счет отсутствия информации о выполнении команды механизмом перемещения ленты. Цель изобретения - повышение точности управления. Для достижения поставленной цели в устройство для управления лентопротяжным механизмом, содержащее.да ,чик временных интервалов, блок упра ления электромагнитом прямого направления, блок управления электромагнитом обратного направления, первый элемент ИЛИ, первый и второй входы которого подключены соответственно к выходам первого и второго элементов И, первые входы которых подключены соответственно к единичному и инверсному выходам первого RS-триггера, входы которого соединены с выходами третьего и четвертого, элементов И, причем выход первого элемента ИЛИ соединен с входом инвертора, введены пятый, шестой, седьмой и восьмой элементы И, второй и третий RS-триггеры, блок управлени пусковым электромагнитом и второй элемент ИЛИ, первый вход которого подключен к единичному выходу второго RS-триггера, S-вход которого соединен с S-входоМ третьего RS-триггера и с выходом пятого элемента И, первый вход которого соединен с первым выходом датчика временных интервалов, первый вход которого подключен к выходу шестого элемента И и к первому входу седьмого элемента И, выход которого соединен с первым входом восьмого элемента И, выход которого подключен к второму входу датчика временных интервалов, второй выход которого соединен с первым входом блока управления электромагнитом прямого направления и с первым входом блока управления электромагнитом обратного направления, второй вход которого подключен к второму входу блока управления электромагнитом прямого направления и к выходу инвертора, вход которого соединен с вторым входом пятого элемента И, с первым входом блока управления пусковым электромагнитом и с выходом первого элемента ИЛИ, первый вход которого подключен к второму входу восьмого элемента И, третий вход блока управления электромагнитом прямого направления соединен с инверсным выходом второго RS-триггера и с вторым входом первого элемента И, первый вход которого подключен к второму входу седьмого элемента И, третий вход блока управления электромагнитом обратного направления соединен с вторым входом второго элемента И и с инверсным выходом третьего RS-триггера, единичный выход которого подключен к второму входу второго элемента ИЛИ, выход которого соединен с первым входом шестого элемента. И, второй вход блока управления пусковым электромагнитом соединен с третьим выходом датчика временных интервалов, четвертый выход которого подключен к первым входам третьего и четвертого элементов И, причем второй вход шестого элемента И является установочным входом устройства, управляющими входами которого являются R-входы второго и третьего RS-триг- геров, вторые входы третьего и четвертого элементов И являются информационными входами устройства, управляющими выходами которого являются выход блока управления электромагнитом прямого направления, выход блока управления электромагнитом обратного направления и выход блока управления пусковым электромагнитом. На фиг,1 изображена структурная электрическая схема предлагаемого устройства; на фиг.2 - структурная электрическая схема датчика временных интервалов. Устройство для управления лентопротяжным механизмом содержит первый 1, второй 2 и третий 3 RS-триггеры, первый 4 и второй 5 элементы ИЛИ, инвертор 5, датчик 7 временных интервалов, первый 8, второй 9, третий 10, четвертый 11, пятый 12, шестой 13, седьмой 14 и восьмой 15 элементы И, блок 16 управления элек тромагнитом прямого направления, бло 17 управления электромагнитом обрат ного направления, блок 18 управлени пусковым электромагнитом. Датчик временных интервалов содержит генератор 19 прямоугольных импульсов, триггер 20, элемент . 2И-ИЛИ 21, кольцевой счетчик 22, первый 23, второй 24, третий 25 и четвертый 26 элементы И. Устройство работает следующим образом. Пусть импульс (Прямо) положительной полярности поступает на R-вход второго RS-триггера 2. RSтриггер 2 изменяет свое состояние и через второй элемент ИЛИ 5 и шестой элемент И 13 включает датчик 7 времанных интервалов, которьлй вырабатывает импульс опроса датчиков положения направления перемещения носителя информации (не показаны) и переключает первый RS-триггер 1 в состояние, соответствующее положению переключающего механизма (не пока зан) . Если состояние переключающего механизма соответствует положению, при котором разрешается перемещение носителя в прямом направлении, то срабатывает первый элемент И 8 и элемент ИЛИ 4, который подключит первый вход блока 18 управления пусковым электромагнитом к датчику V временны интервалов, вырабатывающий импульс включения пускового электромагнита. Блок 18 управления пусковым электромагнитом включит пусковой электро магнит , что приведет к срабатыванию лентопротяжного электромагнита и перемещению носителя информации на один шаг в пр.ямом направлении. После выполнения команды на перемещение носителя информации датчик 7 временных интервалов через пятый элемент И 12 подает на S-вход второго RS-триггера 2 сигнал, который переведет второй RS-триггер 2 (управления. Прямо) в исходное состо .яние, что,в свою очередь,приведет к выключению датчика 7 временных интервалов Ери поступлении следующего импуль Прямо устройство Срабатывает ана логично описанному и по завершении выполнения команды возвращает все эл менты и блоки в исходное состояние. Если при состоянии переключающего механизма, соответствующем положению в котором разрешается- перемещение но сителя в прямом направлении,поступа ет импульс положительной полярности (Обратно.) на R-вход RS-триггера 3, то произойдет изменение состгояни третьего RS-триггера. 3 (управления Обратно), который через второй элемент ИЛИ 5 и шестой элемент И 13 включит датчик 7 временных интервалов, который вырабатывает импульс опроса датчиков положения направления перемещения перфоленты. Так как команда управления не соответствует положению механизма перемещения, то на выходе элемента ИЛИ 4 появляется сигнал, запирающий блок 18 управления пусковым электромагнитом и через инвертор 6 разрешающий производить подключение блока 17 управлени-я электромагнитом обратного направления к датчику 7 временных интервалов, с которого на блок 17 управления электромагнитом обратного направления поступает импульс переключения. После срабатывания электромагнита обратного (реверсного) направления перемещения носителя датчик 7 временных интервалов вьщает импульс опроса состояния датчиков положения, а так как после срабатывания электро-магнита обратного направления произойдет включение датчика обратного направления, то через четвертый элемент И 11 произойдёт переключение первого RS-триггера 1, в результате чего через элемент И 8 и элемент ИЛИ 4 на блок 18 управления пусковым электромагнитом поступит сигнал, разрешающий производить подключение блока 18 управления пусковым электромагнитом к датчику 7 временных интервалов, при этом через инвертор 6 происходит выключение блока 16 управления электромагнитом прямого направления и блока 17 управления электромагнитом обратного направления, а через седьмой 14 и восьмой 15 элементы И поступит сигнал на переключение кольцевого счетчика 22 в датчике 7 временных интервалов, что позволит произвести через блок 18 управления пусковым электромагнитом срабатывание лентопротяжного механизма с максимально возможной скоростью перемещения Носителя информации для данного механизма на один шаг. После снятия импульса управления с блока 18 управления пусковым электромагнитом датчик 7 временных интервалов через пятый элемент И 12 переводит третий RS-триггер 3 (управления Обратно) в исходное состояние, после чего происходит выключение датчика 7 временных интервалов. Таким образом, по одному входящему- импульсу происходит срабатывание механизма направления и ср:абатыванйе механизма перемещения на один шаг в реверсном направлении. При поступлении следующего импульса Обратно на R-вход RS-триггера 3 (управления Обратно) RS-триггер 3 изменяет свое состояние и через эле мент ИЛИ 5 и элемент И 13 включает датчик 7 временных интервалов; RSтриггер 1 после опроса датчиков поло жения остается в состоянии Обратно в результате чего срабатывают элеме И 9 и элемент ИЛИ 4, которые подключают блок 18 управления пусковым эле тромагнитом к датчику 7 временных ин тервалов, а на выходе элемента И 15 появляется сигнал, переключающий кол цевой счетчик 22 датчика 7 временных интервалов на задание механизму максимальной скорости выполнения команд датчик 7 временных интервалов подаст импульс включения пускового электромагнита, что приведет к срабатыванию лентопротяжного механизма и перемещению перфоленты на один шаг в обра йом направлении с максимально возмож ной скоростью перемещения для данного механизма. После выключения импульса управления на пусковой электромагнит с датчика 7 временных интервалов на элемент И 12 подается им пульс, который переводит RS-триггер (управления Обратно) в исходное состояние и выключает датчик 7 временных интервалов. При поступлении следующего импульса Обрат но происходит перемещение - носителя информации на один шаг в обратном направлении с максимальной скоростью перемещения и т.д. Пусть в исходном состоянии переключа1ощ|Л1 механизм соответствует положению, в котором разрешается перемещение носителя в обратном направлении, то с приходом управляющего импульса, на R-вход КЗ-триггера 2 (управления Прямо) КЗ-триггер 2 изменяет свое состояние, в результат чего через элементы ИЛИ 5 и И 13 включается датчик 7 временных интервалов, который вырабатывает импульс опроса датчиков положения направлени перемещения носителя информации и переключает RS-триггер 1 (положения направления) в .состояние, соответствующее состоянию переключающего механизма, т.е. в состояние Обратно, при этом к датчику 7 временных интервалов подключается блок 16 управление, электромагнитом прямого напра вления. По завершении срабатывания электромагнита направления с датчика 7 временных интервалов подается импулЬс опроса датчиков положения, в результате чего КЗ-триг гер 1 изменяет свое состояние на Прямо, срабатывают элементы И 14 и 15, которые выключают кольцевой счетчик 22 датчика 7 временных интервалов и подключают блок 18 управле- i ния пусковым электромагнитом к датчику 7 временных интервалов. Датчик 7 временных интервалов подает на блок 18 управления пусковым электромагнитом импульс включения пускового электромагнита, что приведет к срабатыванию лентопротяжного механизма и перемещению перфоленты на один шаг в прямом направлении . После выключения импульса управле ния на пусковой электромагнит,с датчика 7 временных интервалов на элемент И 12 подается импульс, который переводит КЗ-триггер 2 (управления Прямо) в исходное состояние и выключает датчик 7 временных интервалов, таким образом по одному входному импульсу происходит перевод рычага направления и перемещение перфоленты на один шаг. При поступлении следующих импульсов Прямо или Обратно работа устройства происходит аналогично одному из описанных режимов. Датчик 7 временных интервалов работает следующим образом. Генератор 19 прямоугольных импульсов после включения питания работает в непрерывном режиме. На выходе генератора 19 прямоугольных импульсов появляются импульсы с частотой f, а на выходе триггера 20 импульсы с частотой f/2. После поступления сигнала управления на один вход элемента 2 И-ИЛИ 21 импульсы с частотой f/2 поступают на вход кольцевого счетчика 22,выполненного на триггерах со счетным входом, в результате чего на выходах элементов И 24-26 появляются временные интервалы,- предназначенные для управления переклю.чением направления перемещения носителя информации, опроса состояния положения датчиков направления, включения блоков управления электромагнитами . Если в процессе работы устройства сигнал управления поступит на другой вход элемента 2 И-ИЛИ 21, то на вход кольцевого счетчика 22 поступит удвоеннаячастота f, что позволит совершить операции по перемещению носителя информации с повышенной скоростью. Таким образом, введение новых блоков позволяет повысить точность управления, а следовательно, и надежность механизма протяжки носителя информации, качество и достоверность передаваемой информации.
З
м
I-0
J6
0га
18
-0
0L- S
т 3
/2
Г
П
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления лентопротяжным механизмом | 1987 |
|
SU1607006A1 |
| Устройство для сварки пакетов магнитопроводов электрических машин | 1990 |
|
SU1732413A1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
| Устройство для управления движением магнитной ленты в реверсивном лентопротяжном механизме | 1985 |
|
SU1254554A1 |
| Устройство для возбуждения синхронного электродвигателя | 1985 |
|
SU1288873A1 |
| УСТРОЙСТВО ИНДИКАЦИИ ПЛЕНКИ В ЛЕНТОПРОТЯЖНОМ ТРАКТЕ ФОТОАППАРАТА | 1997 |
|
RU2158950C2 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для регистрации информации на светочувствительном носителе | 1980 |
|
SU920380A1 |
| Устройство управления фоторегистратором осциллограмм | 1978 |
|
SU763799A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕНТОПРОТЯЖНЫМ МЕХАНИЗМОМ, содержащее датчик временных интервалов, блок; управления электромагнитом прямого направления, блок управления электромагнитом обратного направления, первый элемент ИЛИ, первый и второй .ВХОДЫ которого подключены соответственно к выходам первого и второго элементов И, первые входы которых подключены соответственно к единичному и инверсному выходам первого RS-триггера, .входы которого соединены-с выходами третьего и четвертого элементов И, причем выход первого элемента ИЛИ соединен с входом инвертора, отличающееся тем, что, с целью повышения точности управления, в него введены пятый, шестой, седьмой и восьмой элементы И, второй и третий RS-триггерьг, блок управления пусковым электромагнитом и второй элемент ИЛИ, первый вход которого подключен к единичному выходу второго RS-триггера, S -вход которого соединен с S-входом третьего RS-триггера и с выходом пятого элемента И,первый вход которого соединен с первым выходом датчика временных интервалов, первый вход которого подключен к выходу шестого элемента и и к первому входу седьмого элемента И, выход которого соединен с первым входом восьмого элемента И, выхол которого подключен к второму входу датчика временных интервгшов, второй выход которого соединен с пер- вым входом блока управления электромагнитом прямого направления и с первым входом блока управления электромагнитом обратного направления, второй вход которого подключен к второму входу блока управления электромагнитом прямого направления и к выходу инвертора, вход которого соединен с вторым входом пятого элемента И, с первым входом блока уп.равления пусковым электромагнитом и с выходом первого элемента ИЛИ, первый вход которого подключен к второму входу восьмого элемента И, третий вход блока управления электромагнитом прямого направления соединен с- HHBepcHfJM выходом второго RS-триггера и с вторым вхо(О дом первого элемента И, первый вход которого подключен к второму входу седьмого элемента И, третий вход блока управления электромагнитом обратного направления соединен С вторым входом второго элемента И и с инверсным выходом третьего RS-триггера, единичный выход которого подключен к второму входу второго элемента ИЛИ, выход которого соединен с первьам входом шестого элемента- И, второй вход блока управления пусковым электромаг00 нитом соединен с третьим выходом датчика временных интервалов, четвертый О1 выход которого подключен к первым входам третьего и четвертого элементов И, причем второй вход шестого эле,мента И является установочным входом устройства, управляющими входами которого являются R-вхбды второго и третьегоRS-триггеров, вторые входы третьего и четвертого элементов И являются информационными входами устройства, управляющими выходами которого являются выход блока управления электромагнитом прямого направления, выход блока управления электромагнитом обратного направления и выход блока управления пусковым электромагнитом.
-1 гя
г
гг
&
г«
л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крпнйчев Л.Н | |||
| и др | |||
| Документальная электросвязь | |||
| М., Связь, 1977, с.86-93 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3353007, кл.235-61.11, 1967 (прототип) | |||
