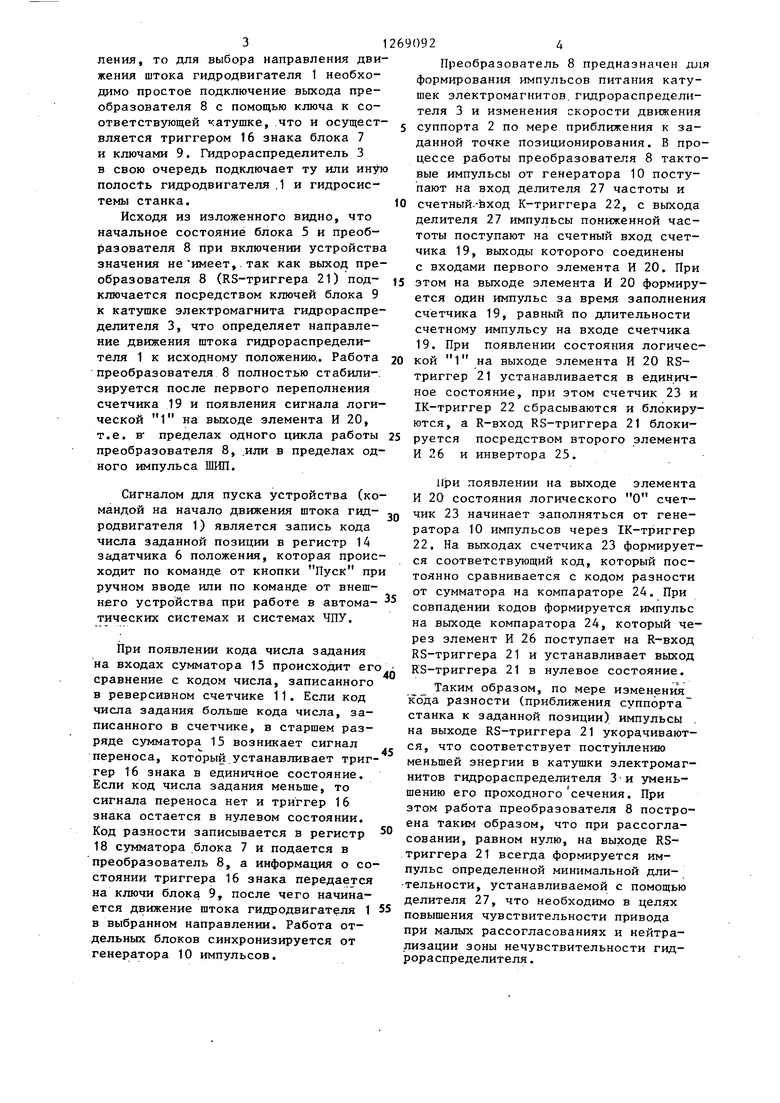
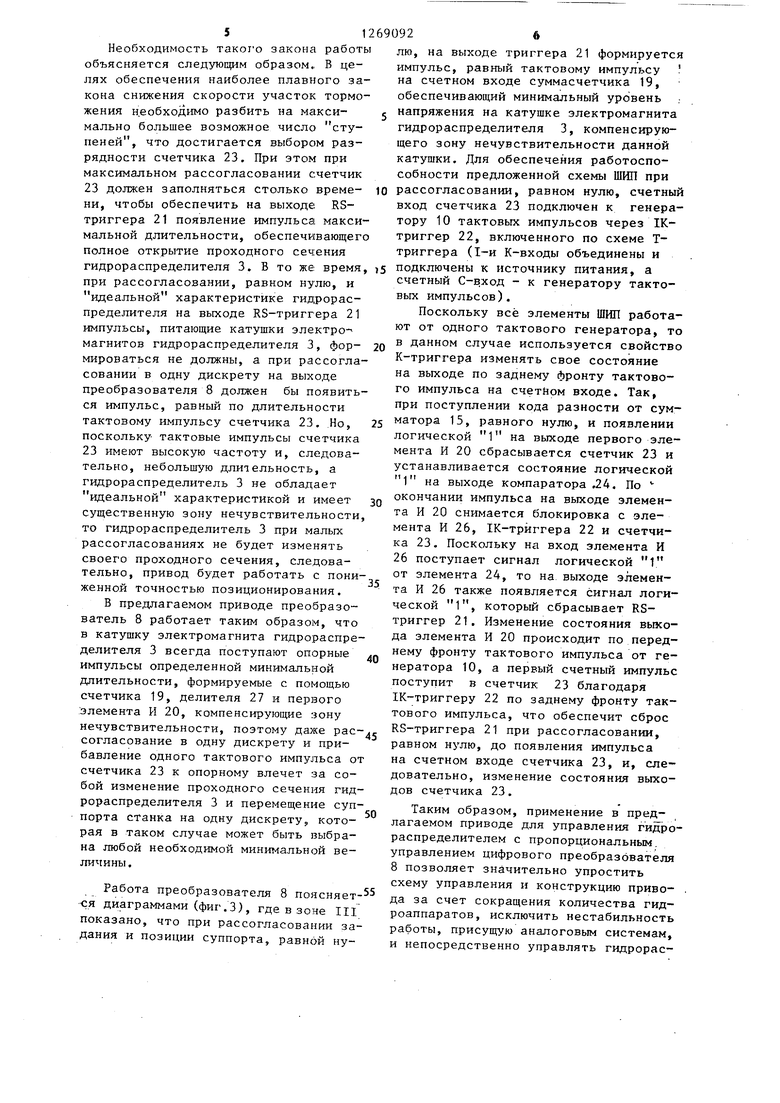
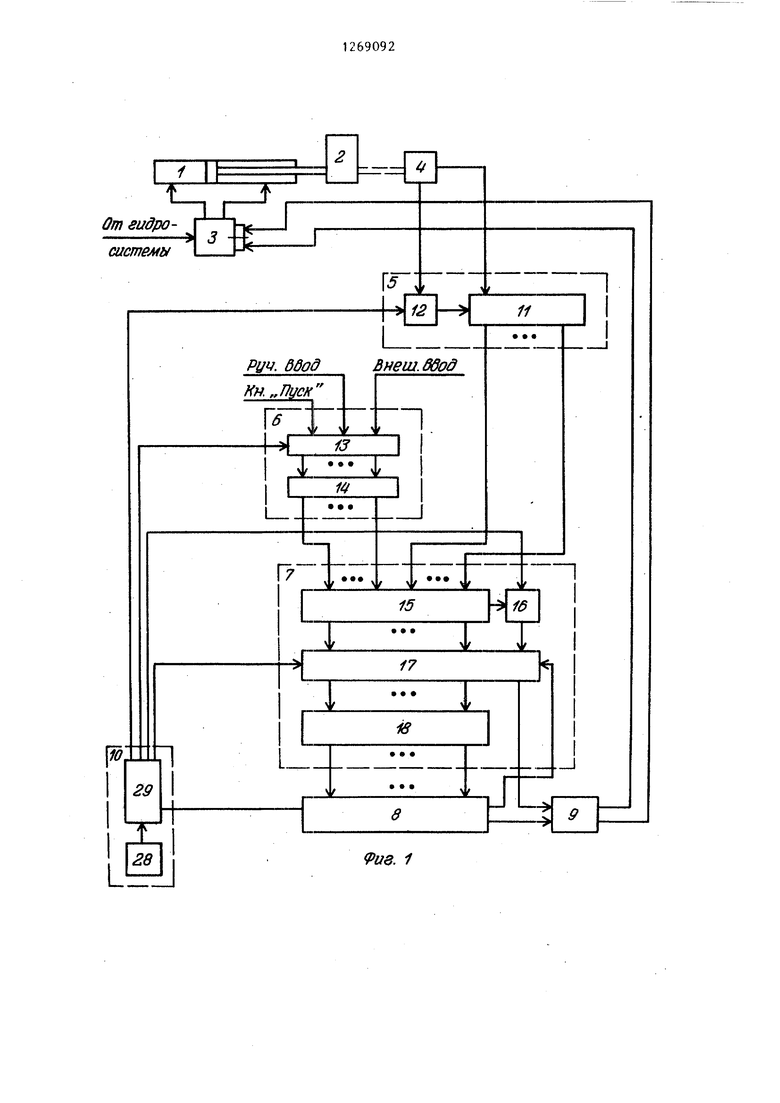
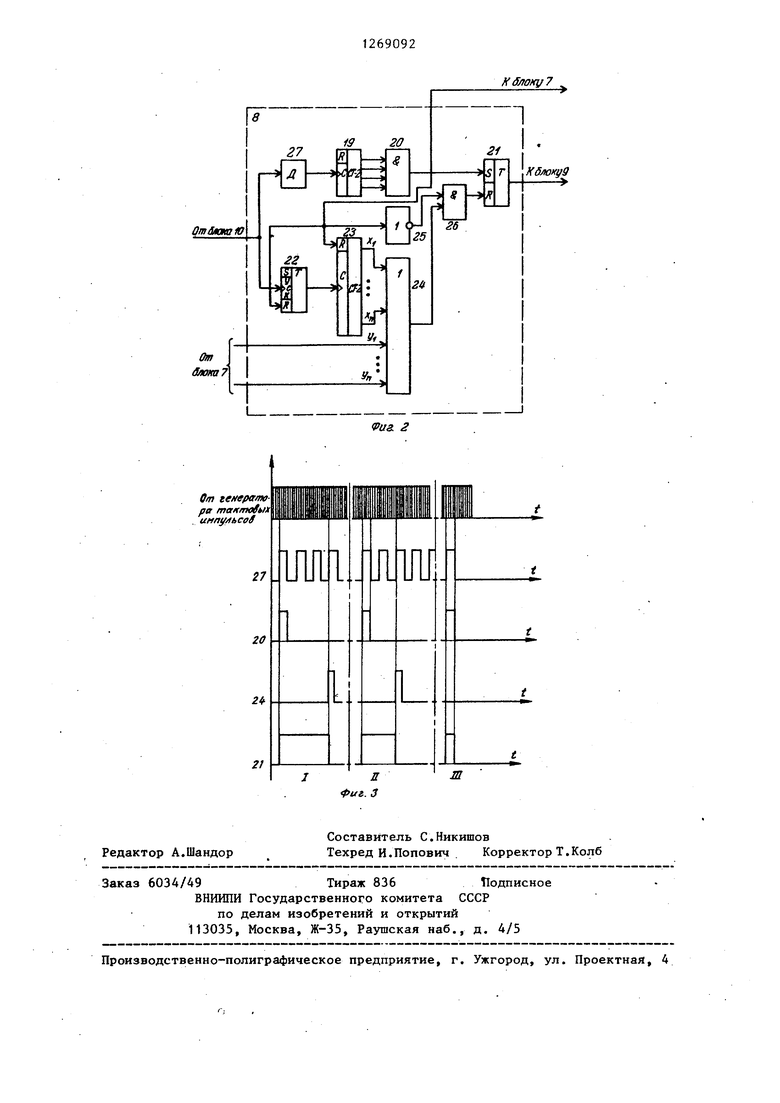
Изобретение относится к системам автоматического управления и может быть использовано для управления положением механизмов технологического оборудования, в частности суппортов агрегатных станков. Целью изобретения является повыше ние точности и надежности работы. На фиг.1 показана блок-схема элек трогидравлического следящего привода на фиг.2 - блок-схема кодо-импульсно го преобразователя;, на фиг.З - временная диаграмма работы преобразова, теля. Электрогидравлический следящий привод содержит гидродвигатель 1, суппорт 2 станка, двухкаскадный дрос сельный гидрораспределитель 3, датчи 4 перемещения, счетчик 5 импульсов, задатчик 6 положения, суммирующий блок 7, кодо-импульсный преобразователь 8, блок 9 ключей, генератор 10 тактовых импульсов. Счетчик 5 импульсов состоит из ре .версивного счетчика 11 и блока 12 синхронизации счетных импульсов. Задатчик 6 положения включает в себя блок 13 ключей и регистр 14. Суммиру кщий блок состоит из сумматора 15, триггера 16 знака, блока 17 ключей, регистра 18. Преобразователь 8 (фиг.2) состоит из счетчика 19 импульсов, элемента И 20, RS-триггера 21, 1К-триггера 22, счетчика 23 импульсов, компаратора 24, инвертора 25, элемента И 26 и де лителя 27 частоты. Генератор 10 тактовых импульсов состоит из генератора 28 прямоугольных импульсов и распределителя: 29 им пульсов. Электрогидравлический реверсивный следящий привод работает следующим образом. При включении питания происходит обнуление регистра 14 задатчика 6 по ложения, регистра 18, суммирующего блока 7 и запуск генератора 28 прямо угольных импульсов блока 10, В исход ноМ положении штока гидродвигателя 1 (суппорта 2) фотоимпульсный датчик 4 перемещения вырабатывает сигнал обну ления реверсивного счетчика 11 счетчика импульсов 5. Генератор 28 прямоугольных импульсов через распределитель 29 импульсов начинает стробировать счетчик 5 импульсов, задатчик 6 положения, суммирующий блок 7, кодо-импульсный преобразователь 8, Первым тактовым импульсом синхронизируется запись счетного импульса от датчика 4 перемещения в реверсивный счетчик 11 посредством блока 12 синхронизации счетных импульсов при движении штока гидродвигателя 1 и сбрасывается триггер 16 знака в блоке 7, Этим обеспечивается направление движения к исходному положению. Если движения штока гидродвигателя 1 нет, то в счетчике 11 сохраняется предыдущее состояние (в исходном положении ), Обратный код числа из счетчика 11 поступает на входы сумматора 15 блока 7. По втором тактовому импульсу происходит запись кода числа заданной позиции в регистр 14 задатчика 6, Запись кода посредством блока 13 ключей при ручном вводе информации происходит по сигналу от кнопки Пуск и сигналу Внешний ввод при работе от внешнего устройства. При отсутствии разрешающих сигналов в регистре 14 сохраняется код предыдущего числа, Поскольку при включении питания регистр 14 обнуляется, то до подачи управляющих сигналов будет сохраняться его нулевое состояние. Прямой код числа с регистра 14 подается на входы сумматора 15 блока 7, Сумматор 15 определяет разницу двух чисел путем сложения их прямого и обратного кодов, При этом, когда второе число больше первого, происходит перенос из старшего разряда сумматора. Сигнал переноса служит для установки триггера 16 знака и определения направления движения. Перенос кода разности из сумматора 15 в регистр 18 происходит посредством блока 17 ключей по третьему тактовому импульсу. При этом запись в регистр 18 и триггер 16 производится только при наличии сигнала от элемента И 20 (фиг,2) преобразователя 8, что обеспечивает поступление информации от суммирующего блока 7 на входы компаратора 24 и информации о состоянии триггера 16 знака на блок 9 ключей один раз за цикл работы преобразователя 8, т,е, один раз на каждый формируемый импульс. Так как гидрораспределитель 3 с пропорциональным управлением имеет два электромагнита с катушками управпения, то для выбора направления дви жения штока гидродвигателя 1 необходимо простое подключение выхода преобразователя 8 с помощью ключа к соответствующей катушке, .что и осущест вляется триггером 16 знака блока 7 и ключами 9. Гидрораспределитель 3 в свою очередь подключает ту или ину полость гидродвигателя ,1 и гидросистемы станка. Исходя из изложенного видно, что начальное состояние блока 5 и преобразователя 8 при включении устройств значения неимеет,.так как выход пре образователя 8 (RS-триггера 21) подключается посредством ключей блока 9 к катушке электромагнита гидрораспре делителя 3, что определяет направление движения штока гидрораспределителя 1 к исходному положению.. Работа преобразователя 8 полностью стабилизируется после первого переполнения счетчика 19 и появления сигнала логи ческой 1 на выходе элемента И 20, т.е. В пределах одного цикла работы преобразователя 8, ,или в пределах од ного импульса ШИП. Сигналом для пуска устройства (ко мандой на начало движения штока гидродвигателя 1) является запись кода числа заданной позиции в регистр 14 задатчика 6 положения, которая проис ходит по команде от кнопки Пуск пр ручном вводе или по команде от внешнего устройства при работе в автоматических системах и системах ЧПУ. При появлении кода числа задания на входах сумматора 15 происходит его сравнение с кодом числа, записанного в реверсивном счетчике 11. Если код числа задания больше кода числа, записанного в счетчике, в старшем разряде сумматора 15 возникает сигнал переноса, который.устанавливает триггер 16 знака в единичное состояние. Если код числа задания меньше, то сигнала переноса нет и триггер 16 знака остается в нулевом состоянии. Код разности записывается в регистр 18 сумматора блока 7 и подается в преобразователь 8, а информация о состоянии триггера 16 знака передается на ключи блока 9, после чего начинается движение штока гидродвигателя 1 в выбранном направлении. Работа отдельных блоков синхронизируется от генератора 10 импульсов. Преобразователь 8 предназначен для формирования импульсов питания катушек электромагнитов, гидрораспределителя 3 и изменения скорости движения суппорта 2 по мере приближения к заданной точке позиционирования. В процессе работы преобразователя 8 тактовые импульсы от генератора 10 поступают на вход делителя 27 частоты и счетный--йход К-триггера 22, с выхода делителя 27 импульсы пониженной частоты поступают на счетный вход счетчика 19, выходы которого соединены с входами первого элемента И 20. При этом на выходе элемента И 20 формируется один импульс за время заполнения счетчика 19, равный по длительности счетному импульсу на входе счетчика 19. При появлении состояния логической 1 на выходе элемента И 20 RSтриггер 21 устанавливается в единичное состояние, при этом счетчик 23 и 1К-триггер 22 сбрасываются и блокируются, а R-вход RS-триггера 21 блокируется посредством второго элемента И 26 и инвертора 25. При появлении на выходе элемента О И 20 состояния логического чик 23 начинает заполняться от ратора 10 импульсов через 1К-триггер 22. На выходах счетчика 23 формируется соответствующий код, который постоянно сравнивается с кодом разности от сумматора на компараторе 24. При совпадении кодов формируется импульс на выходе компаратора 24, который через элемент И 26 поступает на R-вход RS-триггера 21 и устанавливает выход RS-триггера 21 в нулевое состояние. Таким образом, по мере измененш 6ц,а разности (приближения суппорта танка к заданной позиции) импульсы а выходе RS-триггера 21 укорачиваютя, что соответствует поступлению еньшей энергии в катушки электромагитов гидрораспределителя 3и уменьению его проходного сечения. При том работа преобразователя 8 построна таким образом, что при рассоглаовании, равном нулю, на выходе RSриггера 21 всегда формируется имульс определенной минимальной длиельности, устанавливаемой с помощью елителя 27, что необходимо в целях овышения чувствительности привода ри малых рассогласованиях и нейтраизации зоны нечувствительности гидораспределителя . Необходимость такого закона работы объясняется следую1чим образом., В целях обеспечения наиболее плавного закона снижения скорости участок торможения необходимо разбить на максимально большее возможное число ступеней, что достигается выбором разрядности счетчика 23. При этом при максимальном рассогласовании счетчик 23 должен заполняться столько времени, чтобы обеспечить на выходе RSтриггера 21 появление импульса максимальной длительности, обеспечивающего полное открытие проходного сечения гидрораспределителя 3. В то же время при рассогласовании, равном нулю, и идеальной характеристике гидрораспределителя на выходе RS-триггера 21 импульсы, питающие катушки электромагнитов гидрораспределителя 3, формироваться не должны, а при рассогласовании в одну дискрету на выходе преобразователя 8 должен бы появить ся импульс, равный по длительности тактовому импульсу счетчика 23. Но, поскольку тактовые импульсы счетчика 23 имеют высокую частоту и, следовательно, небольшую длительность, а гидрораспределитель 3 не обладает идеальной характеристикой и имеет существенную зону нечувствительности то гидрораспределитель 3 при малых рассогласованиях не будет изменять своего проходного сечения, следовательно, привод будет работать с пони женной точностью позиционирования. В предлагаемом приводе преобразователь 8 работает таким образом, что в катушку электромагнита гидрораспре делителя 3 всегда поступают опорные импульсы определенной минимальной длительности, формируемые с помощью счетчика 19, делителя 27 и первого элемента И 20, компенсирующие зону нечувствительности, поэтому даже рас согласование в одну дискрету и прибавление одного тактового импульса о счетчика 23 к опорному влечет за собой изменение проходного сечения гид рораспределителя 3 и перемещение суп порта станка на одну дискрету,, которая в таком случае может быть выбрана любой необходимой минимальной величины. Работа преобразователя 8 поясняет ся диаграммами (фиг.3), где в зоне III показано, что при рассогласовании за дания и позиции суппорта, равной ную, на выходе триггера 21 формируется импульс, равный тактовому импульсу на счетном входе суммасчетчика 19, обеспечивающий минимальный уровень напряжения на катушке электромагнита гидрораспределителя 3, компенсирующего зону нечувствительности данной катушки. Для обеспечения работоспособности предложенной схемы ШИП при рассогласовании, равном нулю, счетный вход счетчика 23 подключен к генератору 10 тактовых импульсов через IKтриггер 22, включенного по схеме Ттриггера (1-й К-входы объединены и подключены к источнику питания, а счетный С-вход - к генератору тактовьпс импульсов). Поскольку всё элементы ШИП работают от одного тактового генератора, то в данном случае используется свойство К-триггера изменять свое состояние на выходе по заднему фронту тактового импульса на счетном входе. Так, при поступлении кода разности от сумматора 15, равного нулю, и появлении логической 1 на выходе первого элемента И 20 сбрасывается счетчик 23 и устанавливается состояние логической 1 на выходе компаратора 4. По окончании импульса на выходе элемента И 20 снимается блокировка с элемента И 26, 1К-трйггера 22 и счетчика 23. Поскольку на вход элемента И 26 поступает сигнал логической 1 от элемента 24, то на выходе элемента И 26 также появляется сигнал логической 1, который сбрасывает RSтриггер 21. Изменение состояния выкода элемента И 20 происходит по переднему фронту тактового импульса от генератора 10, а первый счетный импульс поступит в счетчик 23 благодаря 1К-триггеру 22 по заднему фронту тактового импульса, что обеспечит сброс RS-триггера 21 при рассогласовании, равном нулю, до появления импульса на счетном входе счетчика 23, и, следовательно, изменение состояния выходов счетчика 23. Таким образом, применение в предлагаемом приводе для управления гидрораспределителем с пропорциональным, управлением цифрового преобразователя 8 позволяет значительно упростить схему управления и конструкцию привода за счет сокращения количества гидроаппаратов, исключить нестабильность работы, присущую аналоговым системам, и непосредственно управлять гидрораспределителем с пропорциональным упра влением. Кроме того, применение предлагаемого устройства исключает специальны устройства, необходимые для наложения переменной составляющей на аналоговы сигнал управления, устраняет влияние зрны нечувствительности гидрораспределителя на работу системы, повьпиает надежность работы системы в целом. Формула изобретения 1. Электрогидравлический следящий привод, содержащий блок ключей, датчик перемещения, последовательно соединенные двухкаскадный дроссельный гидрораспределитель и гидродвигатель и последовательно соединенные задатчик положения и суммирующий блок, отличающийся тем, что, с целью повьшения точности и надежности, в него введены кодо-импульсный преобразователь, счетчик импульсов и генератор тактовых импульсов, выходы которого подключены соответственно к тактовым входам счетчика импульсов, задатчика положения,кодо-импульсного преобразователя, первому и второму тактовым входам суммирующего блока, первый и второй выходы датчика перемещения соединены соответственно с первым и вторым входами счетчика импульсов, выход которого связан с вторым входом суммирующего блока, первый и второй выходы блока ключей подключены к соответствующим входам каскадного дроссельного гндрораспределителя, первый и второй выходы суммирующего блока подсоединены соответственно к входу кодо-импульсного преобразователя и входу блока ключей, второй вход которого соединен с первым выходом кодо-импульсного преобразователя, второй выход кодо-импульсного преобразователя подключен к третьему входу суммирукнцего блока. 2. Привод ПОП.1, отличающийся тем, что кодо-импульснь1й преобразователь содержит инвертор, последовательно соединенные делитель частоты, счетчик импульсов, элемент И и RS-триггер и последовательно соединенные 1К-триггер, второй счетчик импульсов, компаратор и второй элемент И, причем выход первого элемента И соединен с вторым выходом кодо-импульсного преобразователя, входом 1К-триггера, вторым входом второго счетчика импульсов и через инвертор, с вторым входом второго элемента И, вход делителя частоты соединен с вторым входом 1К-триггера и тактовым входом кодо-импульсного преобразователя, выход второго элемента И соединен с вторым входом RS-триггера, подсоединенного выходом к первому выходу кодо-импульсного преобразователя, второй вход компаратора связан с первым входом кодо-импульсного преобразователя.
Г/ТР
. .
От зидро -г
системы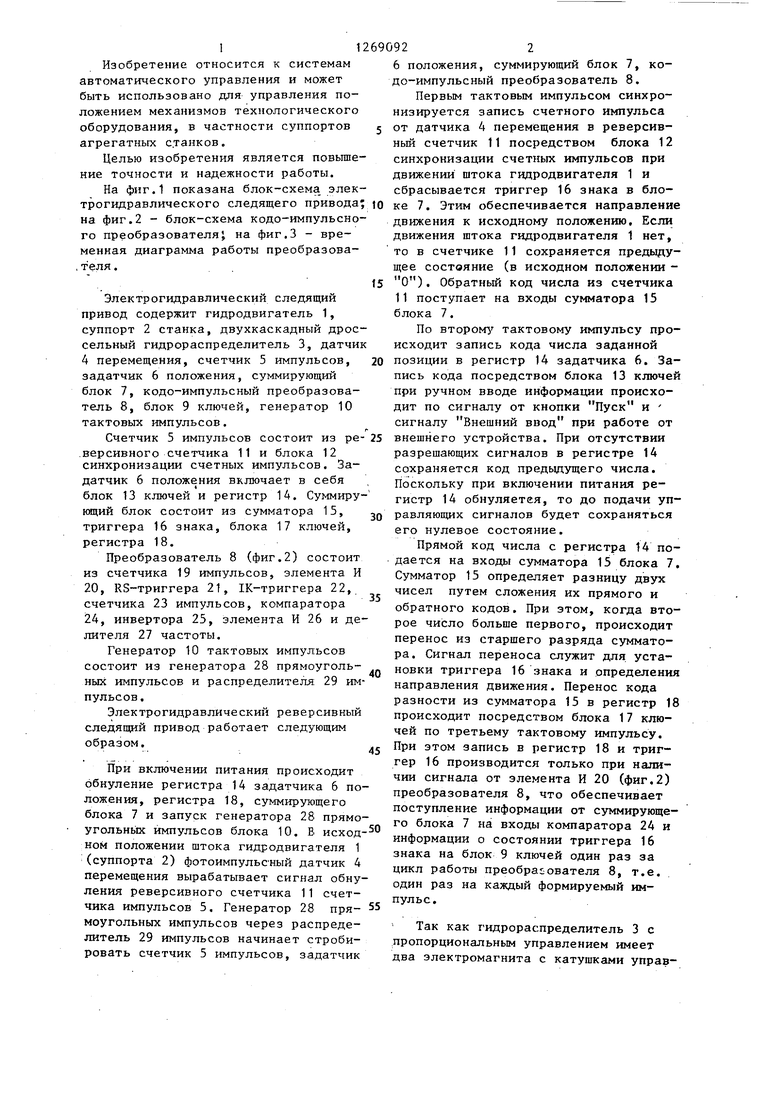
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| Устройство программного управления антенной | 1988 |
|
SU1594487A1 |
| Цифровой регулятор | 1985 |
|
SU1293695A1 |
| Устройство тактовой синхронизации | 1985 |
|
SU1338094A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
Изобретение относится к системам автоматического управления и может быть использовано для управления положением суппортов агрегатных станков. Цель изобретения - повышение точности и надежности работы. Поставленная цель достигается тем, что примененный в приводе преобразователь код - ширина импульса вьтолнен с двумя связанными с общим тактовым генератором счетчиками импульсов, что позволяет обеспечить осцилляцию наиболее простыми средствами. Кроме того, преобразователь компенсирует зону не(Л чувствительности гидрораспределителя, что повышает точность позиционирования привода. 1 з.п. ф-лы, 3 ил.
Pyt. Ввод Внеш. ввод
и. „Пуск
S
Г7
i
L
П
t
/5
15
PU8. 1
ОтбяаюЮ
К Злаку 7
| Авторское свидетельство СССР № 228912, кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| РЕВЕРСИВНЫЙ СЛЕДЯЩИЙ ПРИВОД | 0 |
|
SU332440A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрогидравлический привод вращения хобота ковочного манипулятора.- Вестник машиностроения, 1981, № 7, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
