1
1
Изобретение относится к автоматике и может быть использовано для
автоматизации процесса сканирования или позиционной обработки поверхности, например, при программном контроле толщины или сверления и клепке панелей.
Цель изобретения - расширение области применения.
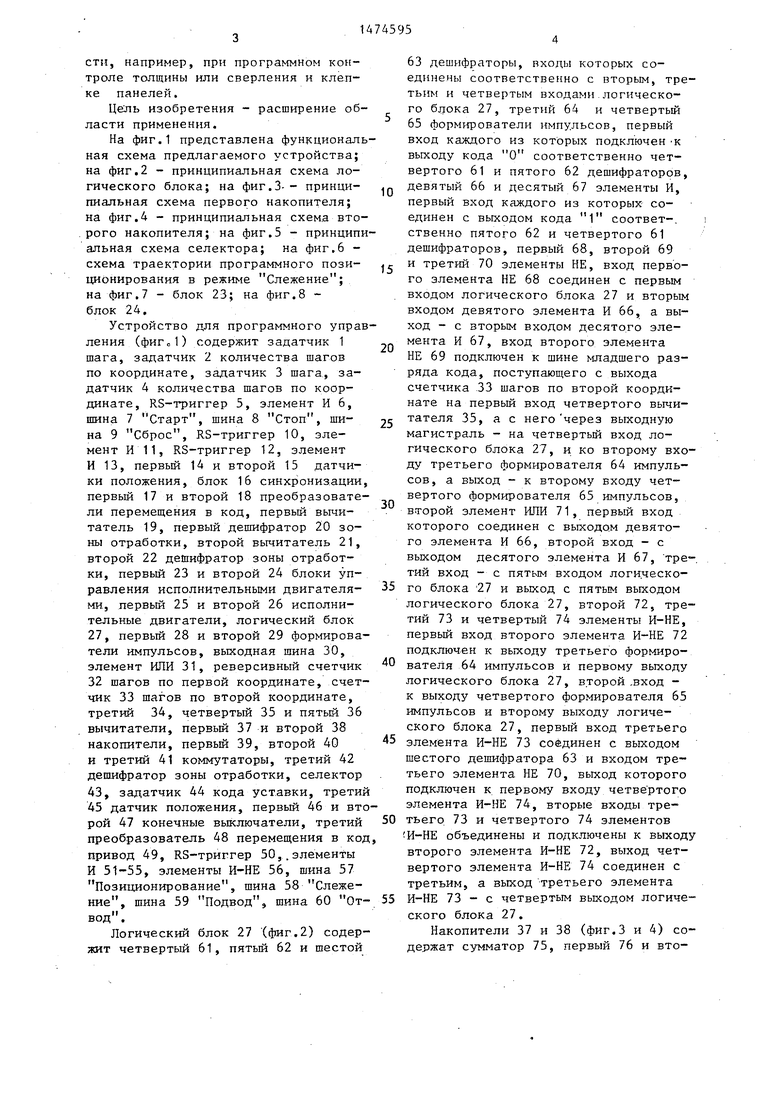
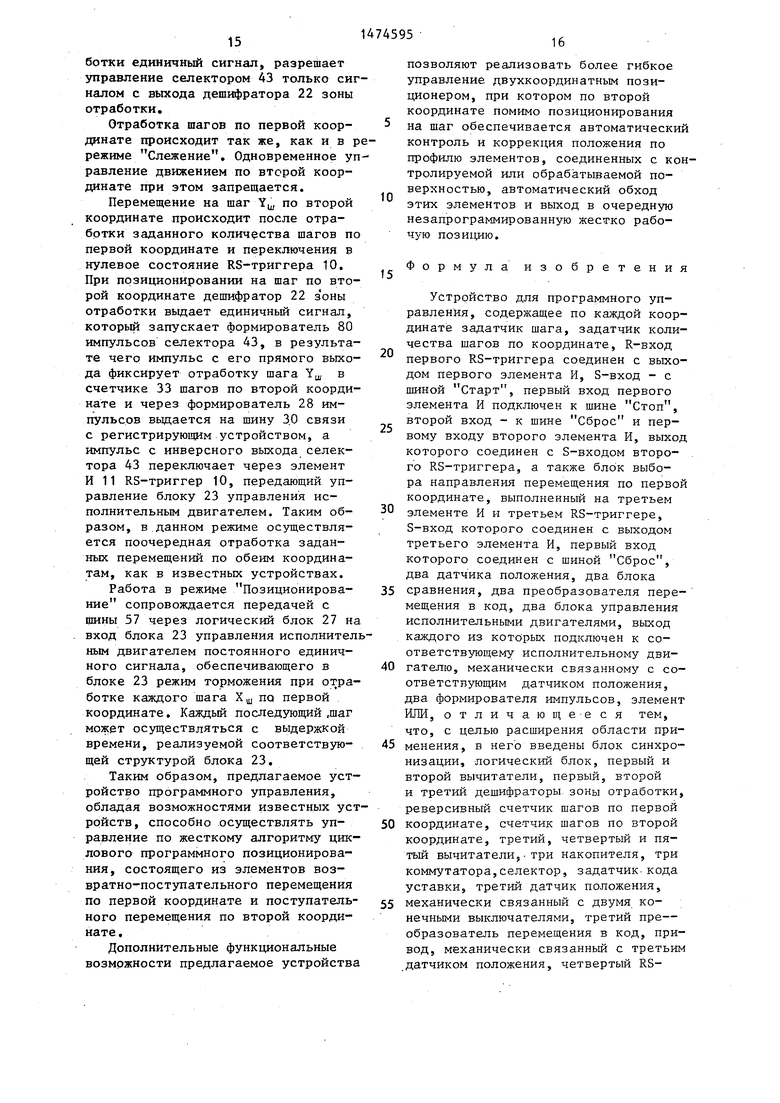
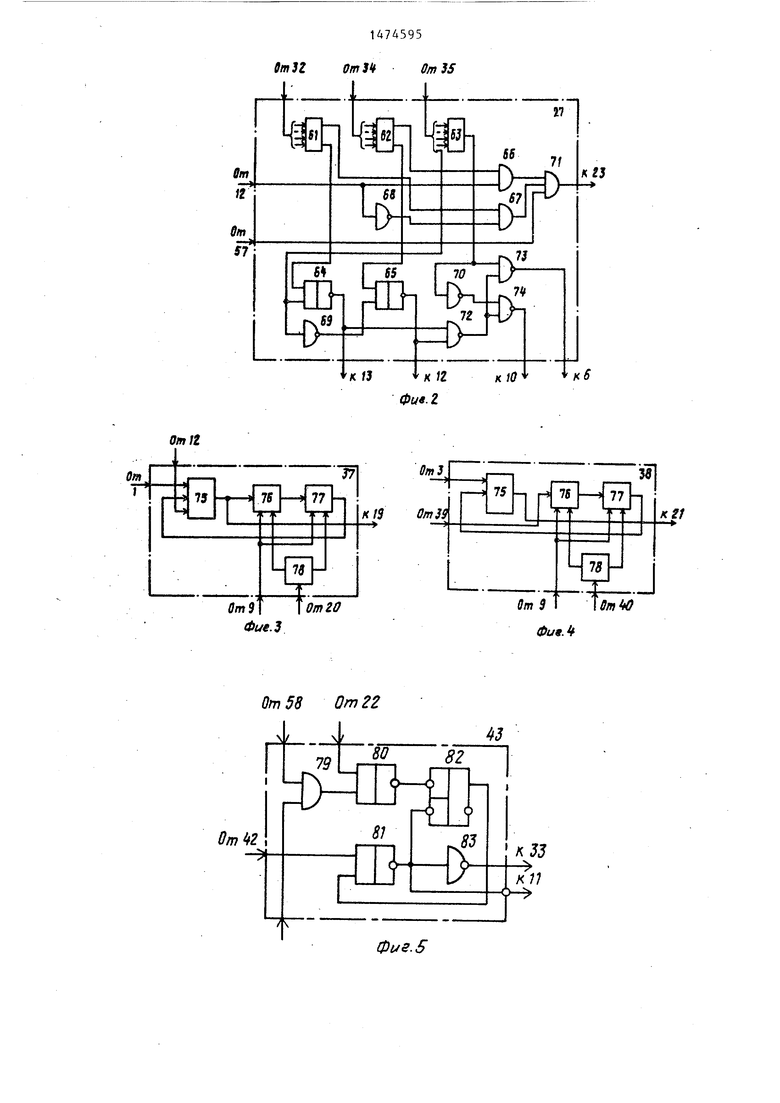
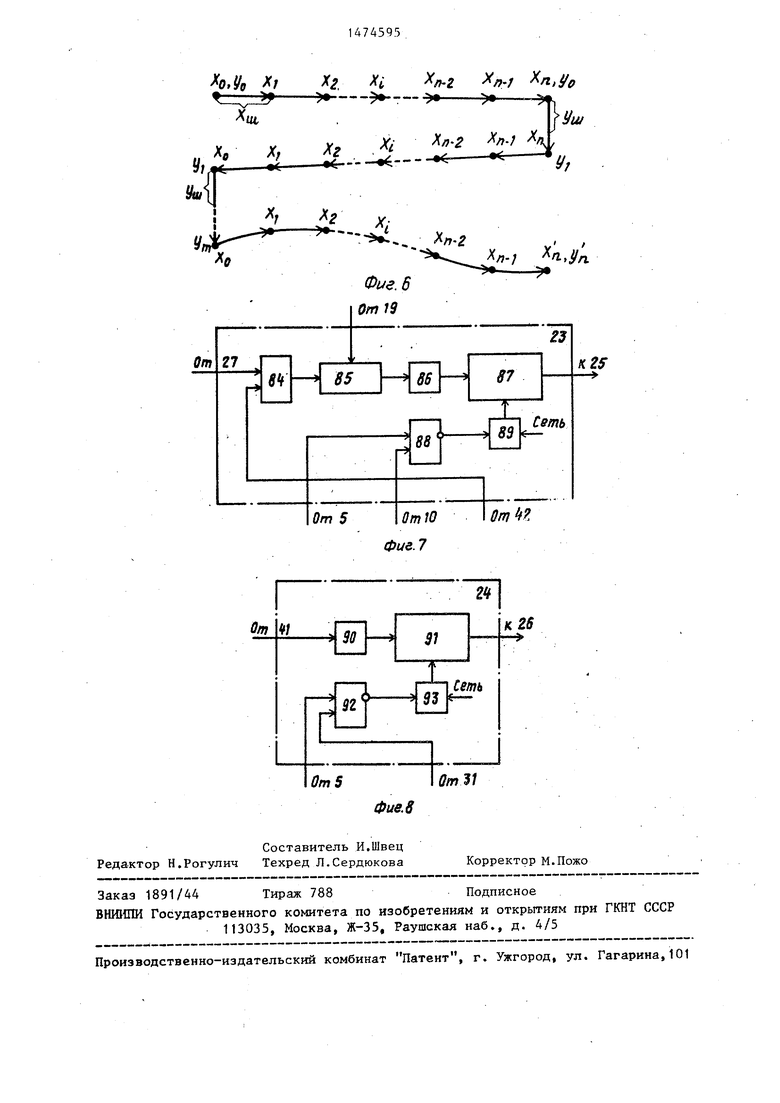
На фиг.1 представлена функциональная схема предлагаемого устройства; на фиг.2 - принципиальная схема логического блока; на фиг.З- - принципиальная схема первого накопителя; на фиг.4 - принципиальная схема второго накопителя; на фиг.5 - принципиальная схема селектора; на фиг.6 - схема траектории программного позиционирования в режиме Слежение ; на фиг.7 - блок 23; на фиг.8 - блок 24.
Устройство для программного управления (фиго) содержит задатчик 1 шага, задатчик 2 количества шагов по координате, задатчик 3 шага, задатчик 4 количества шагов по координате, RS-триггер 5, элемент И 6, шина 7 Старт, шина 8 Стоп, шина 9 Сброс, RS-триггер 10, элемент И 11, RS-триггер 12, элемент И 13, первый 14 и второй 15 датчики положения, блок 16 синхронизации, первый 17 и второй 18 преобразователи перемещения в код, первый вычи- татель 19, первый дешифратор 20 зоны отработки, второй вьгчитатель 21, второй 22 дешифратор зоны отработки, первый 23 и второй 24 блоки управления исполнительными двигателями, первый 25 и второй 26 исполнительные двигатели, логический блок 27, первый 28 и второй 29 формирователи импульсов, выходная шина 30, элемент ИЛИ 31, реверсивный счетчик 32 шагов по первой координате, счетчик 33 шагов по второй координате, третий 34, четвертый 35 и пятый 36 вычитатели, первый 37 и второй 38 накопители, первый 39, второй 40 и третий 41 коммутаторы, третий 42 дешифратор зоны отработки, селектор 43, задатчик 44 кода уставки, третий 45 датчик положения, первый 46 и второй 47 конечные выключатели, третий преобразователь 48 перемещения в код привод 49, RS-триггер 50,.элементы И 51-55, элементы И-НЕ 56, шина 57 Позиционирование, шина 58 Слежение, шина 59 Подвод, шина 60 Отвод.
Логический блок 27 (фиг.2) содержит четвертый 61, пятый 62 и шестой
0
5
0
5
0
5
0
5
63 дешифраторы, входы которых соединены соответственно с вторым, третьим и четвертым входами логического блока 27, третий 64 и четвертый 65 формирователи импульсов, первый вход каждого из которых подключен к выходу кода О соответственно четвертого 61 и пятого 62 дешифраторов, девятый 66 и десятый 67 элементы И, первый вход каждого из которых соединен с выходом кода 1 соответственно пятого 62 и четвертого 61 дешифраторов, первый 68, второй 69 и третий 70 элементы НЕ, вход первого элемента НЕ 68 соединен с первым входом логического блока 27 и вторым входом девятого элемента И 66, а выход - с вторым входом десятого элемента И 67, вход второго элемента НЕ 69 подключен к шине младшего разряда кода, поступающего с выхода счетчика 33 шагов по второй координате на первый вход четвертого вычи- тателя 35, а с него через выходную магистраль - на четвертый вход логического блока 27, и ко второму входу третьего формирователя 64 импульсов, а выход - к второму входу четвертого формирователя 65 импульсов, второй элемент ИЛИ 71, первый вход которого соединен с выходом девятого элемента И 66, второй вход - с выходом десятого элемента И 67, третий вход - с пятым входом логического блока 27 и выход с пятым выходом логического блока 27, второй 72, третий 73 и четвертый 74 элементы И-НЕ, первый вход второго элемента И-НЕ 72 подключен к выходу третьего формирователя 64 импульсов и первому выходу логического блока 27, второй .вход - к выходу четвертого формирователя 65 импульсов и второму выходу логического блока 27, первый вход третьего элемента И-НЕ 73 соединен с выходом шестого дешифратора 63 и входом третьего элемента НЕ 70, выход которого подключен к первому входу четвертого элемента И-НЕ 74, вторые входы третьего 73 и четвертого 74 элементов И-НЕ объединены и подключены к выходу второго элемента И-НЕ 72, выход четвертого элемента И-НЕ 74 соединен с третьим, а выход третьего элемента И-НЕ 73 - с четвертым выходом логического блока 27.
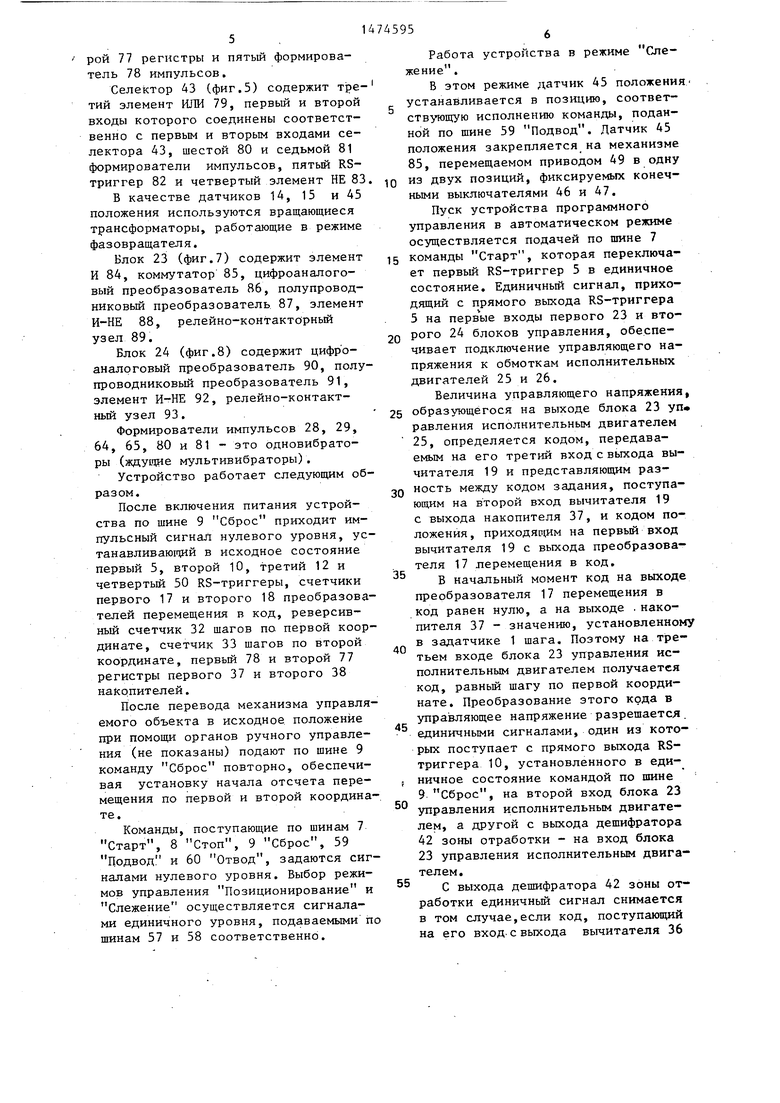
Накопители 37 и 38 (фиг.З и 4) содержат сумматор 75, первый 76 и вто-
рой 77 регистры и пятый формирователь 78 импульсов.
Селектор 43 (фиг.5) содержит третий элемент ИЛИ 79, первый и второй входы которого соединены соответственно с первым и вторым входами селектора 43, шестой 80 и седьмой 81 формирователи импульсов, пятый RS- триггер 82 и четвертый элемент НЕ 83
В качестве датчиков 14, 15 и 45 положения используются вращающиеся трансформаторы, работающие в режиме фазовращателя.
Блок 23 (фиг.7) содержит элемент И 84, коммутатор 85, цифроанапого- вый преобразователь 86, полупроводниковый преобразователь 87, элемент И-НЕ 88, релейно-контакторный узел 89.
Блок 24 (фиг.8) содержит цифро- аналоговый преобразователь 90, полупроводниковый преобразователь 91, элемент И-НЕ 92, релейно-контакт- ный узел 93.
Формирователи импульсов 28, 29, 64, 65, 80 и 81 - это одновибрато- ры (ждущие мультивибраторы).
Устройство работает следующим образом.
После включения питания устройства по шине 9 Сброс приходит импульсный сигнал нулевого уровня, устанавливающий в исходное состояние первый 5, второй 10, третий 12 и четвертый 50 RS-триггеры, счетчики первого 17 и второго 18 преобразователей перемещения в код, реверсивный счетчик 32 шагов по первой координате, счетчик 33 шагов по второй координате, первый 78 и второй 77 регистры первого 37 и второго 38 накопителей.
После перевода механизма управляемого объекта в исходное положение при помощи органов ручного управления (не показаны) подают по шине 9 команду Сброс повторно, обеспечивая установку начала отсчета перемещения по первой и второй координате.
Команды, поступающие по шинам 7 Старт, 8 Стоп, 9 Сброс, 59 Подвод и 60 Отвод, задаются сигналами нулевого уровня. Выбор режимов управления Позиционирование и Слежение осуществляется сигналами единичного уровня, подаваемыми по шинам 57 и 58 соответственно.
Работа устройства в режиме Слежение .
В этом режиме датчик 45 положения устанавливается в позицию, соответствующую исполнению команды, поданной по шине 59 Подвод. Датчик 45 положения закрепляется на механизме 85, перемещаемом приводом 49 в одну
из двух позиций, фиксируемых конечными выключателями 46 и 47.
Пуск устройства программного управления в автоматическом режиме осуществляется подачей по шине 7
5 команды Старт, которая переключает первый RS-триггер 5 в единичное состояние. Единичный сигнал, приходящий с прямого выхода RS-триггера 5 на первое входы первого 23 и втоо рого 24 блоков управления, обеспечивает подключение управляющего напряжения к обмоткам исполнительных двигателей 25 и 26.
Величина управляющего напряжения,
5 образующегося на выходе блока 23 уп равления исполнительным двигателем 25, определяется кодом, передаваемым на его третий вход с выхода вы- читателя 19 и представляющим раз0 ность между кодом задания, поступающим на второй вход вычитателя 19 с выхода накопителя 37, и кодом положения , приходящим на первый вход вычитателя 19 с выхода преобразователя 17 леремещения в код.
В начальный момент код на выходе преобразователя 17 перемещения в код равен нулю, а на выходе накопителя 37 - значению, установленному в задатчике 1 шага. Поэтому на третьем входе блока 23 управления исполнительным двигателем получается код, равньй шагу по первой координате. Преобразование этого кода в управляющее напряжение разрешается единичными сигналами, один из которых поступает с прямого выхода RS- триггера 10, установленного в единичное состояние командой по шине 9 Сброс, на второй вход блока 23 управления исполнительным двигателем, а другой с выхода дешифратора 42 зоны отработки - на вход блока 23 управления исполнительным двигателем.
С выхода дешифратора 42 зоны отработки единичный сигнал снимается в том случае,если код, поступающий на его вход с выхода вычитателя 36
5
0
5
0
5
и представляющий разность между кодом положения датчика 45 и кодом уставки задатчика 44, не превышает допуска, определяющего точность слежения по второй координате за профилем элемента И-НЕ 88 набора.
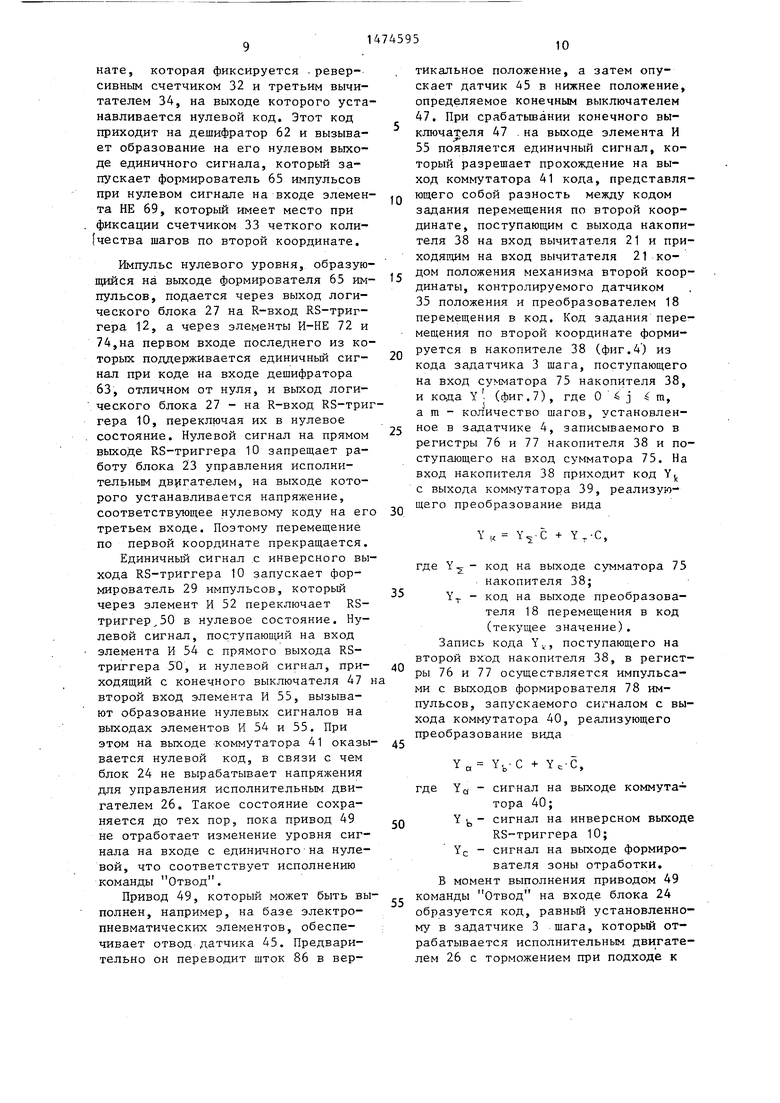
После подачи по шине 7 команды Старт происходит запуск исполнительного двигателя 25 и отработка перемещения по первой координате (координате X), равного шагу Хш (фиг.6), относительно исходной позиции, имеющей координаты Х0, Y0, где Y - вторая координата. Одновременно с этим в режиме Слежение выдается и разрешение работы блока 24 управления исполнительным двигателем 26, поступающее в виде единичного сигнала на вход блока 24 с выхода шестого элемента И 53 через элемент ИЛИ 31. Исполнительный двигатель 26 отрабатывает перемещение по второй координате, определяемое кодом D, приходящим на вход блока 24 с выхода коммутатора 41
D А-Н-С + В -L-C ,
где А - код на выходе второго вычитателя 21; В - код на выходе пятого вычитателя 36;
Н - сигнал на выходе седьмого элемента И 54, имеющий единичный уровень при отработке приводом 49 команды Подвод ;
L - сигнал на выходе восьмого элемента И 55, имеющий единичный уровень при отработке приводом 49 команды Отвод ;
С - режим Слежение. Отработка заданного перемещения по первой координате происходит без торможения при нулевом сигнале на входе блока 23 управления исполнительным двигателем 25. Сигнал торможения Р формируется на выходе логического блока 27 при отработке последнего шага при перемещении в соответствующем направлении и при отработке каждого шага в режиме Позиционирование
Р V-E + V F + G,
где V - сигнал на прямом выходе тртьего RS-триггера 12;
10
15
20
25
8
Е - сигнал на первом выходе пятого дешифратора 62;
F - сигнал на первом выходе четвертого дешифратора 61;
G - режим Позиционирование.
В момент отработки первого шага по первой координате на выходе вы- читателя 19 образуется нулевой код или код с противоположным знаком, который преобразуется дешифратором 20 зоны отработки в единичный сигнал, выдаваемый для записи в реверсивный счетчик 32 шагов по первой координате, на вход накопителя 37 для запуска формирователя 78 импульсов (фиг.З), обеспечивающего перезапись кода с выхода сумматора 75 в регистр 76э а из него - в регистр 77, и на вход формирователя 28 импульсов, вырабатывающего импульс, поступающий на шину 30 связи с регистрирующим устройством.
В связи с изменением значения кода на входе сумматора 75 накопителя 37 с нулевого на равное шагу по первой координате на выходе накопителя 37 устанавливается код, равный двои ному шагу, а на выходе вычитателя 19 - код рассогласования, обеспечивающий через блок 23 такое управление исполнительным двигателем 25, при котором продолжается перемещение по первой координате.
В процессе отработки 1-го шага по первой координате, где 0 41 пэ an- количество шагов, установленное в задатчике 2, в регистр 77 накопителя 37 записыватеся код Х- з. Хш, который поступает на вход сумматора 75, в результате чего на его выходе образуется код X X + Хш (i + 1)-Хш, а на выходе вычитателя 19 - код рассогласования, в со- 45 ответствии с которым блок 23 управления исполнительным двигателем 25 сохраняет направление и скорость перемещения по первой координате.
И так продолжается до отработки (n-l)-ro шага, после чего на первом выходе дешифратора 62 образуется единичный сигнал, который через элемент И 66 и элемент ИЛИ 71 поступает на выход логического блока 27 и переводит блок 23 в режим, обеспечивающий торможение исполнительного двигателя 25 и остановку его в позиции с координатами Хп, YQ (фиг.1} при отработке п-го шага по первой коорди30
35
40
50
55
нате, которая фиксируется реверсивным счетчиком 32 и третьим вычи- тателем 34, на выходе которого устанавливается нулевой код. Этот код приходит на дешифратор 62 и вызыва- ет образование на его нулевом выходе единичного сигнала, который запускает формирователь 65 импульсов при нулевом сигнале на входе элемен- та НЕ 69, который имеет место при фиксации счетчиком 33 четкого коли- чества шагов по второй координате.
Импульс нулевого уровня, образующийся на выходе формирователя 65 им- пульсов, подается через выход логического блока 27 на R-вход RS-триг- гера 12, а через элементы И-НЕ 72 и 74,на первом входе последнего из которых поддерживается единичный сиг- нал при коде на входе дешифратора 63, отличном от нуля, и выход логического блока 27 - на R-вход RS-триг гера 10, переключая их в нулевое состояние. Нулевой сигнал на прямом выходе RS-триггера 10 запрещает работу блока 23 управления исполнительным двигателем, на выходе которого устанавливается напряжение, соответствующее нулевому коду на его третьем входе. Поэтому перемещение по первой координате прекращается.
Единичный сигнал с инверсного выхода RS-триггера 10 запускает формирователь 29 импульсов, который через элемент И 52 переключает RS- триггер 50 в нулевое состояние. Нулевой сигнал, поступающий на вход элемента И 54 с прямого выхода RS- триггера 50, и нулевой сигнал, при- ходящий с конечного выключателя 47 н второй вход элемента И 55, вызывают образование нулевых сигналов на выходах элементов И 54 и 55. При этом на выходе коммутатора 41 оказы- вается нулевой код, в связи с чем блок 24 не вырабатывает напряжения для управления исполнительным двигателем 26. Такое состояние сохраняется до тех пор, пока привод 49 не отработает изменение уровня сигнала на входе с единичного на нулевой, что соответствует исполнению команды Отвод.
Привод 49, который может быть вы- полней, например, на базе электропневматических элементов, обеспечивает отвод датчика 45. Предварительно он переводит шток 86 в вертикальное положение, а затем опускает датчик 45 в нижнее положение, определяемое конечным выключателем 47. При срабатывании конечного выключателя 47 на выходе элемента И .
55 появляется единичный сигнал, который разрешает прохождение на выход коммутатора 41 кода, представляющего собой разность между кодом задания перемещения по второй координате, поступающим с выхода накопителя 38 на вход вычитателя 21 и приходящим на вход вычитателя 21 кодом положения механизма второй координаты, контролируемого датчиком 35 положения и преобразователем 18 перемещения в код. Код задания перемещения по второй координате формируется в накопителе 38 (фиг.4) из кода задатчика 3 шага, поступающего на вход сумматора 75 накопителя 38, и кода Y1 (фиг. 7), где 0 4j m, а щ - количество шагов, установленное в задатчике 4, записываемого в регистры 76 и 77 накопителя 38 и поступающего на вход сумматора 75. На вход накопителя 38 приходит код Yk с выхода коммутатора 39, реализующего преобразование вида
Y , Y С + Y,-C,
где Y.J. - код на выходе сумматора 75
накопителя 38;
YT - код на выходе преобразователя 18 перемещения в код (текущее значение). Запись кода Yv, поступающего на второй вход накопителя 38, в регистры 76 и 77 осуществляется импульсами с выходов формирователя 78 импульсов, запускаемого сигналом с выхода коммутатора 40, реализующего преобразование вида
Ya
Yb С
Yc С,
где Ya - сигнал на выходе коммутатора 40; Y ь - сигнал на инверсном выходе
RS-триггера 10;
Yc - сигнал на выходе формирователя зоны отработки. В момент выполнения приводом 49 команды Отвод на входе блока 24 образуется код, равный установленному в задатчике 3 шага, который отрабатывается исполнительным двигателем 26 с торможением при подходе к
заданной точке. После перемещения на шаг Уш по второй координате из позиции с координатами Х„, Y0 формирователь зоны отработки выдает единичный сигнал, который через элемент И-НЕ 56 и элемент И 51 переключает RS-триггер 50 в единичное состояние и через формирователь 80 чмпульсов RS-триггер 82 селектора 43. Единичный сигнал, образующийся на прямом выходе RS-триггера 50, отрабатывается приводом 49. Вначале привод 49 .поднимает датчик 45, а затем разрешает подпружинивающему узлу отвести шток до упора в направлении следующего элемента набора -, стрингера. При срабатывании конечного выключателя 46 коммутатор 41 подключает к входу блока 24 управления исполнительным двигателем выход вычитате- ля 36.
После отработки исполнительным двигателем 26 кода рассогласования с выхода вычитателя 36 механизмы устройства устанавливаются в позицию с координатами Хп, Y, (фиг.6). В этой позиции дешифратор 42 зоны отработки выдает сигнал, который за- пускает формирователь 81 импульсов селектора 43.На выходе формирователя 81 образуется импульс нулевого уровня, который через инверсный выход селектора 43 и элемент И 11 переключает RS-триггер 10 в единичное состояние через элемент НЕ 83 и прямой выход селектора 43 запускает счетчик 33 шагов по второй координате и формирователь 28 импульсов, который выдает импульс на шину 30 связи с регистрирующим устройством, и через R-вход переключает в нулевое состояние RS-триггер 82, блокирующий повторный запуск формирователя 81 импульсов сигналами с выхода дешифратора 42 зоны отработки, которые могут возникать в процессе слежения за профилем элементов набора.
.С появлением единичного сигнала на выходе дешифратора 42 зоны отработки разрешается преобразование , кода, поступающего на вход блока 23, в напряжение, управляющее исполнительным двигателем 25. Б связи с тем, что после установки в позицию с координатами Xn, Y0 в регистрах 76 и 77 накопителя 37 зафиксировался код, равный X п п «Хш, а знак
0
5
0
5
0
5
0
5
операции суммирования, определяемый единичным уровнем сигнала, по- ступающего с прямого выхода RS-триггера 12 на второй вход накопителя 37, изменился на знак операции вычитания в результате переключения RS-триггера 12 в нулевое состояние, на выходе накопителя 37 образуется код, равный (n-1) Xu, Этот код подается на второй вход вычитателя 19, на другой вход которого приходит код Хп с выхода преобразователя 17 перемещения в код. На выходе вычитателя 19 получается разностный код, равный Хш с отрицательным знаком, что вызывает изменение полярности выходного напря7 ения блока 23 управления исполнительным двигателем и изменение направления перемещения по первой координате. В процессе отработки заданного кода происходит переход из точки с координатами Х„, Y., в точку с координатами Хп.,, Y1T (где Y1T - текущее значение положения по второй координате после- обработки первого шага Y), при достижении которой срабатывание дешифратора 20 зоны отработки вызывает уменьшение на единицу содержимого реверсивного счетчика 32 шагов по первой координате, уменьшение на шаг Хш содержимого регистров 76 и 77 накопителя 37 и выходного кода накопителя 37 и формирование импульса на шине 30 связи с регистрирующим устройством. Аналогично происходит отработка каждого последующего ша- га Хы.
При достижении позиции с координатами X,,, на выходе 1 дешифратора 61 образуется единичный сигнал, который через элемент И 67, на второй вход которого приходит единичный сигнал с элемента НЕ 68, и элемент ИЛИ 71 поступает на выход логического блока 27 и переводит блок 23 в режим, обеспечивающий тор3 можение исполнительного двигателя 25 при подходе к позиции с координатами Х0, Y,. В указанной позиции в реверсивном счетчике 32 шагов по первой координате устанавливается нулевой код, в связи с чем на нулевом выходе дешифратора 61 появляется единичный сигнал, который запускает формирователь 64 импульсов при единичном сигнале на его втором входе, который имеет место при фиксации счетчиком 33 нечетного количества шагов по второй координате. Импульс нулевого уровня, образующийся на выходе формирователя 64 импульсов, переключает в единичное состояние через элемент И 13 RS-триггер 12 и в нулевое состояние через элементы И-НЕ 72 и 74 RS-триггер 10. Единичный перепад сигнала на инверсном выходе RS-триггера 10 происходит через коммутатор 40 на вход накопителя 38 и запускает формирователь 78 импульсов, который записывает в регистры 76 и 77 код координаты Y1, приходящий на второй вход накопителя 38 с выхода преобразователя 18 перемещения в код через коммутатор 39. Относительно координаты Y, происходит отработка следующего шага Y w по второй координате, которая выполняется аналогично описанной.
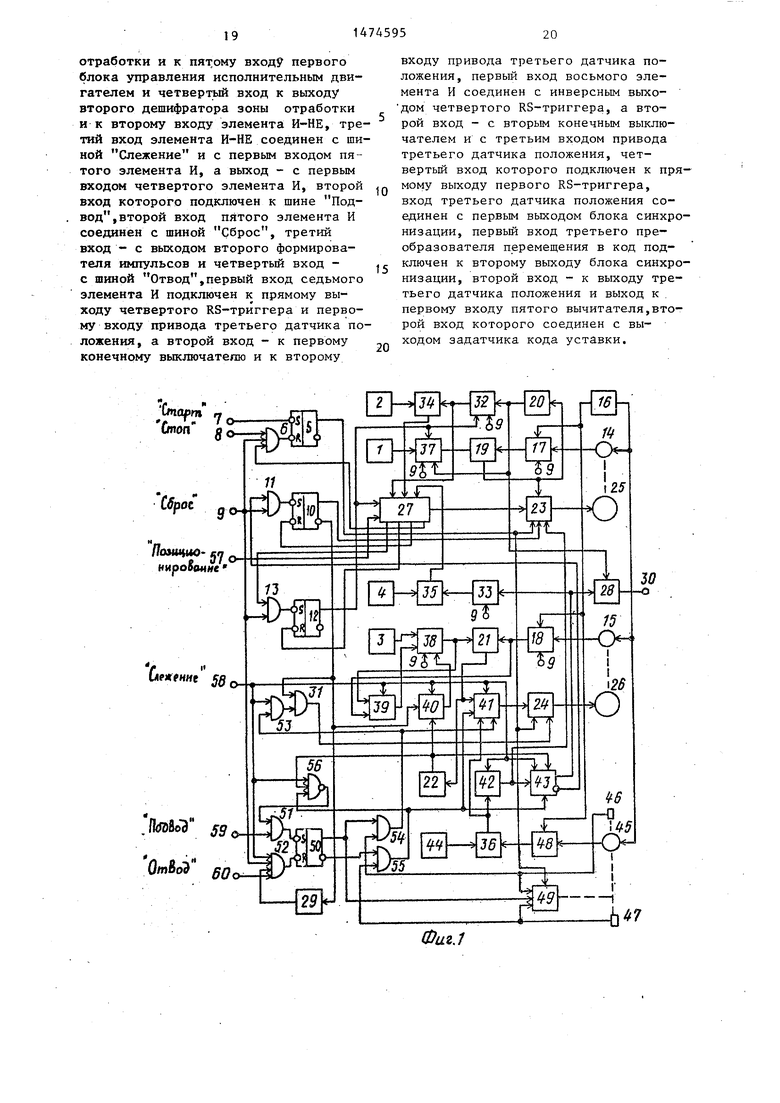
Поочередная отработка заданных перемещений по обеим координатам происходит до тех пор, пока управляемые механизмы не придут в конечную позицию, например, с координатами Х„, YM (фиг.6)1 С приходом в данную - позицию в реверсивном счетчике 32 (шагов по первой координате и счетчике 33 шагов по второй координате устанавливаются кодовые значения, равные набранным соответственно в первом 2 и втором 4 задатчиках количества шагов по обеим координатам. Нулевой код,образующийся при этом на выходе вычитателя 35, вызывает появление на выходе дешифратора 63 единичного сигнала, отменяющего блокирование по первому входу элемента И-НЕ 73 и блокирующего через элемент НЕ 70 по первому входу элемент И-НЕ 74. Нулевой код, образующийся на выходе вычитателя 34 при отработке последнего шага Хш по первой координате при движении в прямом направлении, показанном на фиг.6} поступает через третий вход логического блока 27 на дешифратор 62, вызывая образование единичного сигнала на нулевом выходе кода, запускающего формирователь 65 импульсов, поскольку на его втором входе также присутствует единичный сигнал, что соответствует четному количеству шагов по второй координате при движении в прямом направлении, т.е. нулевому сигналу на входе элемента
0
5
0
5
0
5
0
5
0
5
НЕ 69. Импульс нулевого уровня проходит с выхода формирователя 65 через элементы И-НЕ 72 и 73, на четвертый выход логического блока 27 и через элемент И 6 переключает в нулевое состояние RS-триггер 5.
В случае установки в задатчике 4 нечетного количества шагов по второй координате управляемые механизмы приходят в конечную Позицию при движении по первой координате в обратном -направлении. Отработка последнего шага Хш при перемещении в данном направлении сопровождается установкой в реверсивном счетчике 32 шагов по первой координате нулевого кода, который поступает через вход логического блока 27 на Дешифратор 61, вызывая образование единичного сигнала на нулевом выходе кода, запускающего третий формирователь 64 импульсов, на втором входе которо го единичный сигнал присутствует при нечетном количестве шагов по второй координате, т.е. при движении в обратном направлении. Импульс нулевого уровня, образующийся на выходе третьего формирователя 64 импульсов, также проходит через элементы И-НЕ 72 и 73 на выход логического блока 27 и через элемент И 6 переключает в нулевое состояние RS-триг- гер 5.
Нулевой сигнал с прямого выхода RS-триггера 5 осуществляет через блоки 23 и 24 снятие управляющих напряжений с исполнительных двигателей 25 и 26 и остановку автоматического режима работы устройства программного управления.
Работа при выключении режима Слежение.
В данном режиме на шине 58 Слежение устанавливается нулевой уровень сигнала, который переключает через элемент И 52 RS-триггер 50 в нулевое состояние,обеспечивая отвод приводом 49 датчика 45 положения в позицию, определяемую конечным выключателем 47, подключает через коммутатор 39 выход накопителя 38 к его второму входу, подключает выход де- шифратора 22 зоны отработки к третьему входу накопителя 38, подключает выход вычитателя 21 к второму входу блока 24 управления исполнительным двигателем, устанавливает на выходе дешифратора 42 зоны отработки единичный сигнал, разрешает управление селектором 43 только сигналом с выхода дешифратора 22 зоны отработки.
Отработка шагов по первой координате происходит так же, как и в р режиме Слежение. Одновременное управление движением по второй координате при этом запрещается.
Перемещение на шаг Чш по второй координате происходит после отработки заданного количества шагов по первой координате и переключения в нулевое состояние RS-триггера 10. При позиционировании на шаг по второй координате дешифратор 22 з оны отработки выдает единичный сигнал, который запускает формирователь 80 импульсов селектора 43, в результате чего импульс с его прямого выхода фиксирует отработку шага Уш в счетчике 33 шагов по второй координате и через формирователь 28 импульсов выдается на шину 30 связи с регистрирующим устройством, а импульс с инверсного выхода селектора 43 переключает через элемент И 11 RS-триггер 10, передающий управление блоку 23 управления исполнительным двигателем. Таким образом, в данном режиме осуществляется поочередная отработка заданных перемещении по обеим координатам, как в известных устройствах.
Работа в режиме Позиционирование сопровождается передачей с шины 57 через логический блок 27 на вход блока 23 управления исполнительным двигателем постоянного единичного сигнала, обеспечивающего в блоке 23 режим торможения при отработке каждого шага Хш по первой координате. Каждый последующий ,шаг может осуществляться с выдержкой времени, реализуемой соответствующей структурой блока 23.
Таким образом, предлагаемое устройство программного управления, обладая возможностями известных устройств, способно осуществлять управление по жесткому алгоритму циклового программного позиционирования, состоящего из элементов возвратно-поступательного перемещения по первой координате и поступательного перемещения по второй координате.
Дополнительные функциональные возможности предлагаемое устройства
позволяют реализовать более гибкое управление двухкоординатным позиционером, при котором по второй координате помимо позиционирования на шаг обеспечивается автоматический контроль и коррекция положения по профилю элементов, соединенных с контролируемой или обрабатываемой поверхностью, автоматический обход этих элементов и выход в очередную незапрограммированную жестко рабочую позицию.
Формула изобретения
Устройство для программного управления, содержащее по каждой координате задатчик шага, задатчик количества шагов по координате, R-вход первого RS-триггера соединен с выходом первого элемента И, S-вход - с шиной Старт, первый вход первого элемента И подключен к шине Стоп, второй вход - к шине Сброс и первому входу второго элемента И, выход которого соединен с S-входом второго RS-триггера, а также блок выбора направления перемещения по первой координате, выполненный на третьем элементе И и третьем RS-триггере, S-вход которого соединен с выходом третьего элемента И, первый вход которого соединен с шиной Сброс, два датчика положения, два блока
сравнения, два преобразователя перемещения в код, два блока управления исполнительными двигателями, выход каждого из которых подключен к соответствующему исполнительному двигателю, механически связанному с соответствующим датчиком положения, два формирователя импульсов, элемент ИЛИ, отличающееся тем, что, с целью расширения области применения, в него введены блок синхронизации, логический блок, первый и второй вычитатели, первый, второй и третий дешифраторы зоны отработки, реверсивный счетчик шагов по первой
координате, счетчик шагов по второй координате, третий, четвертый и пятый вычитатели, три накопителя, три коммутатора,селектор, задатчик кода уставки, третий датчик положения, механически связанный с двумя конечными выключателями, третий пре- образователь перемещения в код, привод, механически связанный с третьим датчиком положения, четвертый RSтриггер, пять элементов И, элемент И-НЕ, причем входы первого и второго датчиков положения подключены к первому выходу блока синхронизации, первые входы первого и второго преобразователей перемещения в код соединены с вторым выходом блока синхронизации, вторые входы которых подключены к выходу соответствующего датчика положения, третьи входы преобразователей перемещения в код соединены с шиной Сброс, входы первого и второго дешифраторов зоны отработки подключены к выходам первого и второго вычитателей, первые входы которых соединены с выходом соответствующего преобразователя перемещения в код, первые входы первого и второго блоков управления исполнительными двигателями соединены с прямым выходом первого RS-триггера, второй вход первого блока управления исполнительным двигателем соединен с прямым выходом второго RS-триггера, третий вход - с выходом первого вычитателя, первый вход логического блока соединен с прямым выходом третьего RS-триггера, первый выход - с вторым входом третьего элемента И, второй выход - с R-входом третьего RS-триггера, четвертый выход - с третьим входом первого элемента И, а пятый выход логического блока - с четвертым входом первого блока управления исполнительным двигателем, первый вход первого формирователя импульсов соединен с выходом первого дешифратора зоны отработки, а выход - с выходной шиной, кроме того, первый вход реверсивного счетчика шагов по первой координате подключен к выходу первого дешифратора зоны отработки и первому входу первого накопителя, второй вход - к прямому выходу третьего RS-триггера и второму входу первого накопителя, третий вход - к шине Сброс, выход реверсивного счетчика шагов по первой координате подключен к первому входу третьего вычитателя и второму входу логического блока, второй вход третьего вычитателя соединен с выходом первого задатчика количества шагов по координате, а выход - с третьим входом логического блока, третий вход первого накопителя подключен к выход первого задатчика шага, четвертый
0
5
0
5
0
5
0
5
0
5
вход - к шине C6potj, выход первого накопителя подключен к второму входу первого вычитателя, первый вход счетчика шагов по второй координате соединен с прямым выходом селектора, инверсный выход которого соединен с вторыми входами второго элемента И и первого формирователя импульсов, второй вход - с шиной Сброс, а выход - с первым входом четвертого вычитателя, второй вход которого подключен к выходу второго задатчика количества шагов по координате, а выход - к четвертому входу логического блока, пятый вход которого соединен с шиной Позиционирование, первый вход второго накопителя подключен к выходу второго задатчика шага, второй вход - к выходу первого коммутатора, третий вход - к выходу второго коммутатора, четвертый вход - к шине Сброс, а выход - к второму входу второго вычитателя и первому входу первого коммутатора, второй вход которого соединен с первым входом второго вычитателя, а третий вход - с шиной Слежение, первый вход второго коммутатора подключен к выходу второго дешифратора зоны отработки, второй вход - к инверсному выходу второго RS-триггера, к первому входу элемента ИЛИ и входу второго формирователя импульсов, третий вход второго коммутатора - к шине Слежение, первый вход третьего коммутатора соединен с выходом второго вычитателя, второй вход - с выходом восьмого элемента И, с первым входом элемента И-НЕ и с первым входом селектора, третий вход третьего коммутатора - с выходом пятого вычитателя и с первым входом третьего дешифратора зоны отработки, четвертый вход - с выходом седьмого элемента И и с первым входом шестого элемента И, пятый вход - с шиной Слежение, а выход - с вторым входом второго блока управления исполнительным двигателем, третий вход которого подключен к выходу элемента ИЛИ, второй вход элемента ИЛИ подключен к выходу шестого элемента И, второй вход которого соединен с шиной Слежение, второй вход третьего дешифратора зоны отработки подключен к шине Слежение и к второму входу селектора, третий вход которого подключен к выходу третьего дешифратора зоны
отработки и к пятому вход первого блока управления исполнительным двигателем и четвертый вход к выходу второго дешифратора зоны отработки и к второму входу элемента И-НЕ, третий вход элемента И-НЕ соединен с шиной Слежение и с первым входом пятого элемента И, а выход - с первым входом четвертого элемента И, второй вход которого подключен к шине Подвод, второй вход пятого элемента И соединен с шиной Сброс, третий вход - с выходом второго формирователя импульсов и четвертый вход - с шиной Отвод,первый вход седьмого элемента И подключен к прямому выходу четвертого RS-триггера и первому входу привода третьего датчика положения, а второй вход - к первому конечному выключателю и к второму
0
5
0
входу привода третьего датчика положения, первый вход восьмого элемента И соединен с инверсным выхо- дом четвертого RS-триггера, а второй вход - с вторым конечным выключателем и с третьим входом привода третьего датчика положения, четвертый вход которого подключен к прямому выходу первого RS-триггера, вход третьего датчика положения соединен с первым выходом блока синхронизации, первый вход третьего преобразователя перемещения в код подключен к второму выходу блока синхронизации, второй вход - к выходу третьего датчика положения и выход к первому входу пятого вычитателя,второй вход которого соединен с выходом эадатчика кода уставки.
4-6
U
#
#
28т
i
18
Ј- ЯЩ
BL
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для контроля дефектов и профилей поверхности изделий | 1987 |
|
SU1582094A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Круговой интерполятор | 1985 |
|
SU1359772A1 |
Изобретение относится к автоматике и может быть использовано для автоматизации процесса сканирования или позиционной обработки поверхности, например при программном контроле толщины или сверлении и клепке панелей. Цель изобретения - расширение области применения. Устройство содержит задатчики шага и задатчики количества шагов по двум координатам, задатчик кода уставки, пусковую схему, выполненную на первом RS- триггере с первым элементом И на R -входе, схему выбора координаты, выполненную на втором RS-триггере со вторым элементом И на S- входе, схему выбора направления перемещения по первой координате, выполненную на третьем RS- триггере с третьим элементом И на S- входе, три датчика положения, три преобразователя перемещения в код, пять вычитателей, три дешифратора зоны отработки, два блока управления исполнительными двигателями, механически связанными с соответствующими датчиками положения, привод, механически связанный с третьим датчиком положения и двумя конечными выключателями, реверсивный и нереверсивный счетчики шагов соответственно по первой и второй координатам, два накопителя, логический блок, три коммутатора, селектор, два формирователя импульсов, схему определения направления установки третьего датчика положения, выполненную на четвертом RS- триггере с четвертым элементом И на S- входе и пятым элементом И на R- входе, шестой, седьмой и восьмой элементы И, ЭЛЕМЕНТ И-НЕ, элемент ИЛИ, шины "старт", "стоп", "сброс", "подвод", "отвод", "позиционирование", "слежение" и шину связи с регистрирующим устройством. Устройство обеспечивает автоматический контроль и коррекцию положения по профилю элементов, соединенных с контролируемой или обрабатываемой поверхностью, автоматический обход этих элементов и выход в очередную незапрограммированную жестко рабочую позицию по второй координате в процессе циклового программного позиционирования. Целесообразно использование устройства для автоматического контроля и обработки крупногабаритных изделий, например панелей рефрижераторов. 7 ил.
м
Р1Ш0
6Ш0
I
L
й/j 5 Г
«у
Л« «tftf
/ч7
Ј 9Лф
i
fiw/
Й/J
Хр.Уд Xl ХЈ Xj, Х„.2 Xf)-J п,у0
- --}- -- -}УШУ
ut
х х X i п 2 Xn f Л/
ъ%&-2.---«-Уш
г хг
}УШ У
-, Xtj-2
п-1 хп,Уп
Фиг. 6 От 19
| Устройство для программного управления станком | 1977 |
|
SU693339A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система программного управления перемещением,например,двухкоординатного стола | 1972 |
|
SU476550A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
