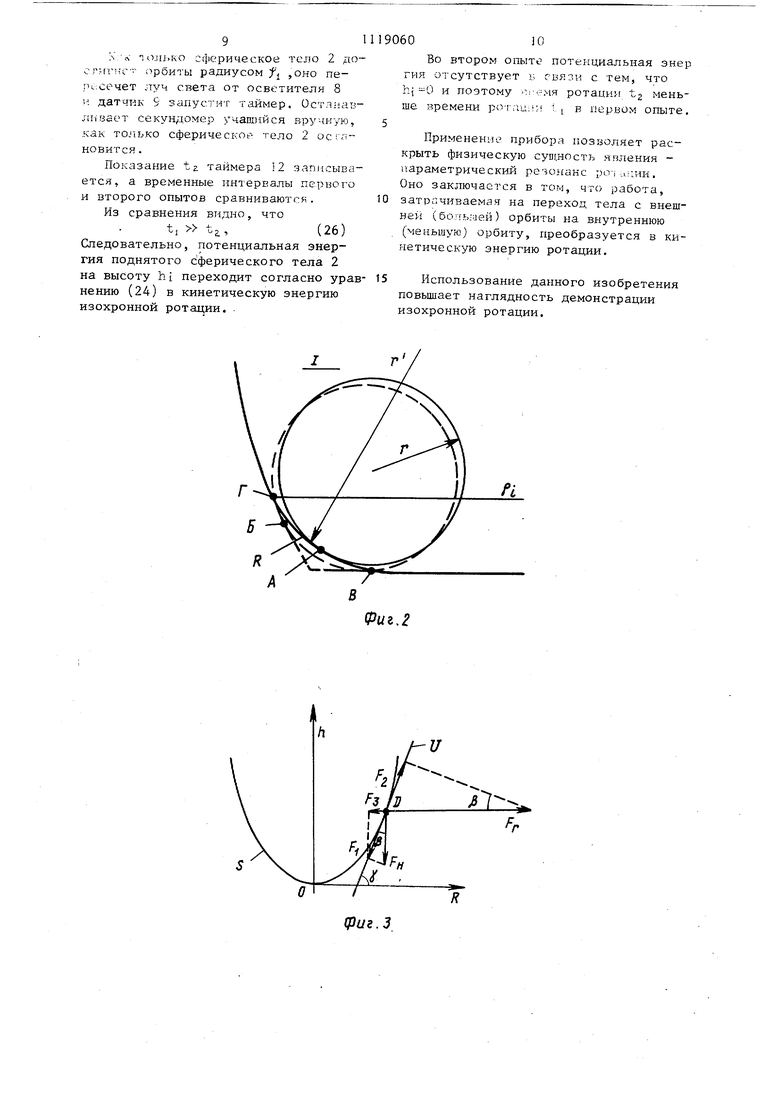
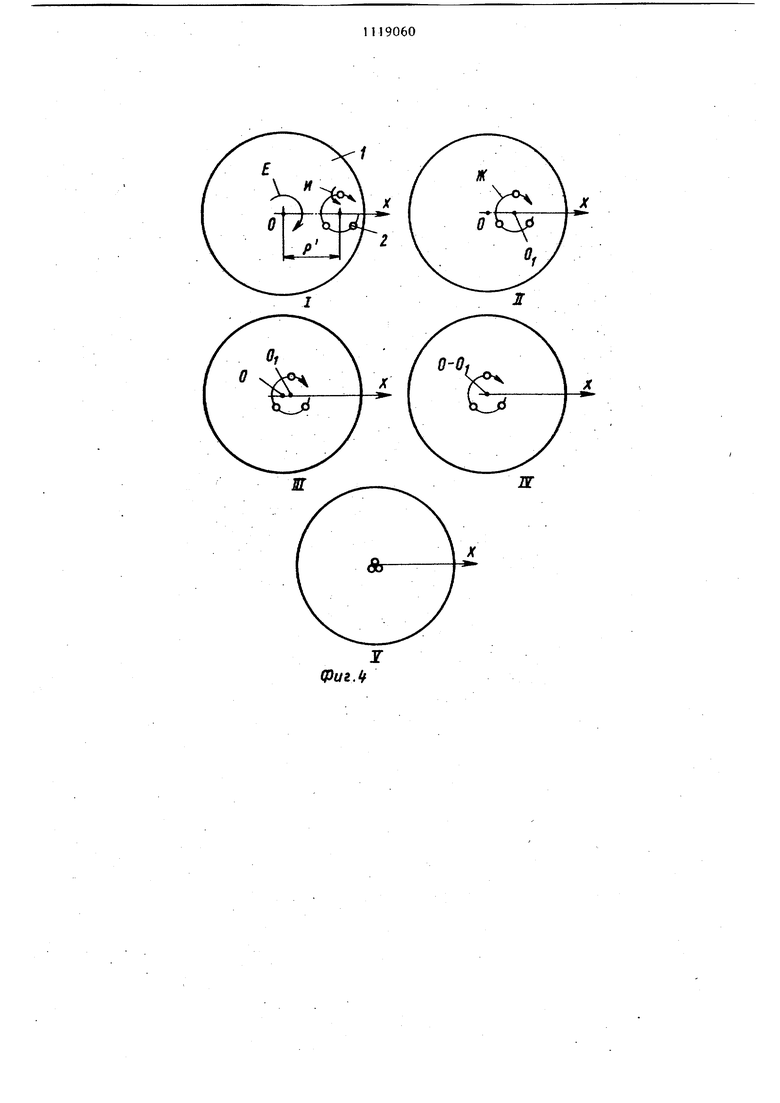
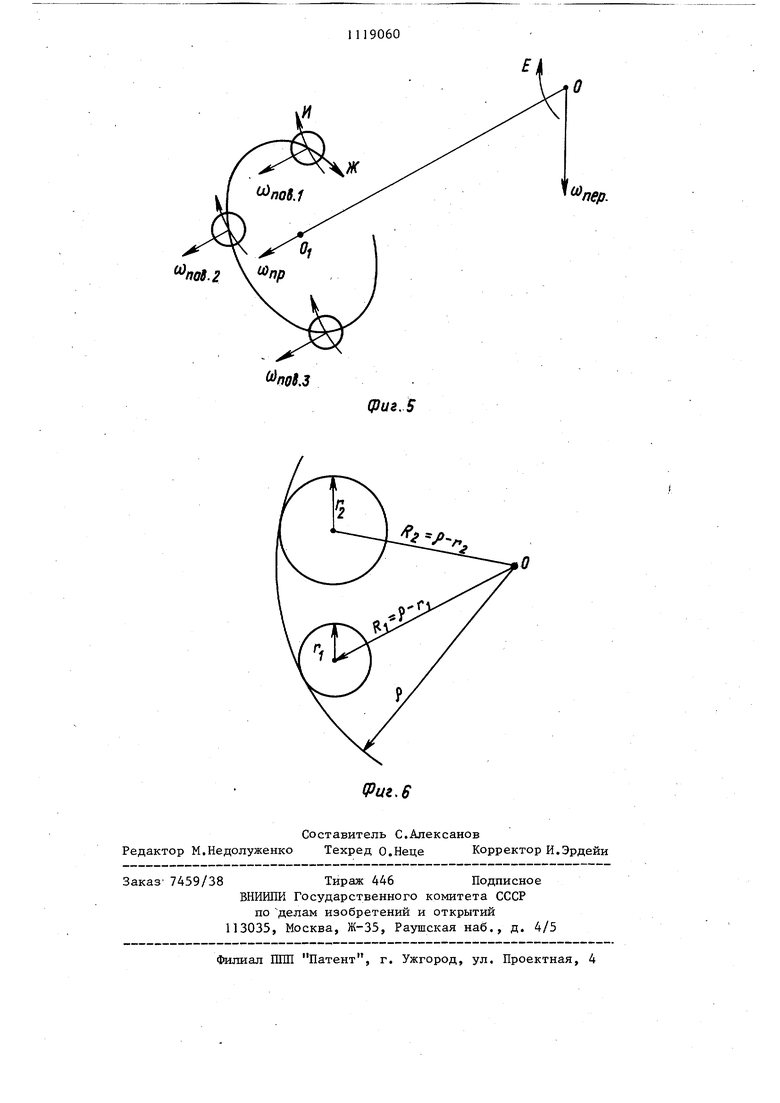
Изобрете1ше относится к учебным пособиям по физике и может быть использовано для демонстрации законов изохронной ротации. Известен учебный прибор по физике, содерлсащий корпус из прозрачного материала в форме параболоида, уста1юзлени 1й узкой частью на основании, 1рузы сферической формы разной массы и размеров, регистратор, соединенный с фотодатчиком, установлениъы над корпусом, и осветитель, расположенный под корпусом Cl X Недостатком известного устройства является невысокая наглядность демонстрации законов изохронного вращения . Целью изобретения является повышение наглядности демонстрации законов изохронного вращения. Поставленная цель достигается тем что учебный прибор по физике, содержащий корпус из прозрачного материала в форме параболоида, установленный узкой 1астью на основании, грузы сферической формы разной массы и раэ меров, регистратор, соединенный с фотодатчиком, установленным над корпусом, и осветитель, расположенный под корпусом, имеет блок переключате лей, таймер, дополнительные фотодатчики, дополнительные осветители и дополнительный прозрачный корпус в виде усеченного параболоида, закрепленного усеченной частью на основании при этом первый дополнительный фото датчик установлен вертикально над осветителем и корпусом в форме параболоида, первый дополнительный осветитель размещен под дополнительным прозрачным корпусом, над которым по одной вертикали с первым дополнитель ным осветителем установлен второй дополнительный фотодатчик, соединениьп выводом через блок переключателей с выводом первого дополнительного фотодатчика, регистрирукиций выводблока переключателей подключен к выводу таймера, причем второй дополнительный осветитель размещен под корпусом в форме параболоида в зоне максимально) кривизны. На фиг.1 представлен схематически учебный прибор но физике, где f радиус окружности, с которого начинается отсчет времени ротации; h. отсчитываемая высота, с которой происходит опускание тела; на фиг.2 602узел 1 на фиг,1, где А, Б и В - точки касания сферических тел для случая несопряженного соедине1шя параболоида с плоскостью, Г - точка сопряжения параболоида с. кривой сопря женин Р., причем окружность радиуса j3j пересекает точку Г; на фиг.З план сил, действующих на тело в точке Д неустойчивого равновесия тела при изохронной ротации; на фиг.4в плане покадрово ротация группы сферических тел, где О - центр параболоида, О- - центр масс- системы сферических тел 2, - текущий радиус орбиты, описываемьй центром масс системы, Е - направление переносного . движения, Ж - направление прецессионного движения, И - направление поворотного движения - качения ;на фиг.5план направлений движений и векторов угловых скоростей, где вектор переносной угловой скорости, вектор прецессионной угловой скорости; %ов-1.%ов2 %овз- вектора угловых скоростей поворотных движений; на фиг,6 - план радиусов, их зависимость друг от друга. Учебный прибор по физике содержит прозрачньв корпус 1 в виде параболида, сферические грузы 2 разной массы и размеров, регистратор 3, электрически связанный с ним первый фотодатчик 4, установленный над корпусом, осветитель 5, второй прозрачный корпус 6 в виде усеченного параболоида, второй осветитель 7, третий осветитель 8, второй фотодатчик 9, третий фотодатчик 10, .7 Второй фотодатчик 9 соединен электрически через первый ключ 11 с входом таймера 12, а третий фотодатчик 10 - электрически через второй ключ 13 с входсм таймера 12 (фиг.1). При этсм пябское основание второго корпуса 6 сопряжено с плоскостью параболоида R радиусом г , превосходящим радиус г сферического груза 2. Это условие необходимо для снижения потерь на трение. Если соединение плоского основания выполнено пунктирной линией, то сферическая масса 2 имеет две точки касания Б и В (фиг.З), лежащие на разных радиусах орбит. -Блок переключателей содержит ключи Пи 13, При этом дополнительный фотодатчик 9 установлен вертикально над осветителем 7 и корпусом в формо нараболоида,дополнительный осветитель 8 раз мещен под дополнительным прозрачным корпусом, над которым по одной вертикали с дополнительным бсветителем 8 установлен дополнительный фотодатчик 10, соединенный выводом через блок переключателей с вьшодом допол1штельного фотодатчика 9, регистрирующий вывод блока переключателей подключен к выводу таймера 12, причем дополнительный осветитель 8 размещен под корпусом в форме параболоида в зоне максимальной кривизны. В случае выполнения требования сопряжения плоского основания с плос костью параболоида по кривой R радиусом г, превосходящим радиус г сферического груза, сферический груз 2 имеет на любом участке второго кор пуса 6 одну точку касания А, что сни жает потери на трение и повышает точ ность демонстрации эксперимента. Второй 9 и третий 10 фотодатчики смещены от геометрической оси корпусов 1 и 6 на величину р- - исходный радиус окружности, по которой катятся сферические грузы 2. Таким образо параметры параболоидов обоих корпусов идентичны. Демонстрация законов изохронной ротации сводится к исследованию основного уравнения изохронной ротации , FI- Е; (1,2) (1) F - m (1,3) где Fr - центробежная сила; - угловая скорость; m - масса сферического груза 2 R - радиус орбиты; Бц - Ньютон.ова сила взаимного тя готения; g - ускорение евободнопадающего L - момент количества движения Уравнения (1.1) - закон изменения центробежной силы, (1.2) - второй закон Ньютона и (1.3) - закон сохранения количества движения. Демонстрацию изохронной ротации этого явления производят в два приема. Вначале учащимся предлагают вывести уравнение изохронной ротации из уравнения ( 1) 2 л где Т - период обращения сферического груза 2; g - ускорение свободнопадающего К - коэффициент крутизны параболы. Вывод згравнения (2) производят согласно фиг.З. на которой S - парабола, и - касательная в точке D неустойчивого равновесия сферического груза 2. На сферический груз в точке D параболы S действуют две силы: центробежная Ньютоновская сила F. Спроецировав эти силы на касательную и в точке D, получим силы F-I н cosp Через тригонометрические формулы приведения с учетом, что лучим |i н sin г . F,2. Fr cos в данном случае |fj т.е. равнодействующая двух сил F2 по модулю равна нулю. Тогда, расписав значения сил в выражении (7), получим m-g sin - OU ю R cos j . (8) Выразив отсюда угловую скорость меем l-ft,T то tg 2 есть функция h от радиуса R, т.е. tg у lifR) - (10) в данном случае функция h(R) есть уравнение параболы h k л, а ее первая производная h 2k R. Подставляя (12) вместо текущего значения tg -j в (9) и заменив угловую скорость и; черва период обращения Т, получим уравнение (2), Период Т обращения сферического тела 2, движущегося по круговым орбитам, лежащим внутри параболоида, не зависит от массы тела и радиуса орбит и является величиной постоянной для данного параболоида с коэффициентом крутизны равным К. Для проверки справедливости уравнения (2) учащийся измеряет линейкой диаметр d параболоида по верхнему краю корпуса 1 и определяет радиус R |-- г f- г, (13) 5 где R - радиус орбиты; d - диаметр параболоида; j3 - радиус окружности по которо происходит качение сферичес кого груза 2; г - радиус сферического груза 2 Поскольку г J) , то практически принимают R р (1) Затем учащийся опускает на дно вторую линейку и в месте скрещивани обеих ленеек определяет высоту Jh, а потом по формуле (1) приводит ее к виду .K Rl ; вычисляет коэффициент крутизны К. Подставив значение К в формулу ( учащийся определяет период обращени сферического груза для данного пара болоида и приступает к практической части - проверке тождества периода обращения полученным теоретическим путем. Для этого, прижав сферический гр 2 к внутренней поверхности корпуса 1, учащийся с силой посьшает груз 2 по кругу в любую сторону. Сферическое тело 2 обращается по круговым орбитам, лежащим на параболоиде и по мере того, как кинетическая энергия обращающегося тела тратится на преодоление трения, оно постепенно опускается на дно корпуса 1 . При этом регистратор 3 за каждый оборот тела 7 измеряет период обращения Т и учащийся видит, что показания прибора совпадают с расчетными данными, а так же и то, что Т const,( 16). т.е. период обращения тела в параболоиде постоянен. Таким образом уясняется принцип изохронной ротации. Для демонстрации прецессионного движения группы сферических тел 2 относительно центра масс системы на внутренней поверхности параболоида с одновременной демонстрацией эквивалентности энергий катящихся по окружности тел разной массы с одина ковой переносной угловой скоростью относительно центра этой окружности учащийся берет в руки несколько сферических тел разной масс и запускает их по окружности на вну ренней поверхности параболоида в ко 06 пусе 1, при этом всегда сферические тела 2 выстраиваются в круг и движутся, как это показано покадрово на фиг.4. На кадре 1, как и на остальных кадрах, ось X вращается с переносной скоростью по стрелке Е, при этом период обращения оси X равен Т const согласно (16), О - центр параболоида корпуса 1,0- центр масс системы сферических тел 2,Стрелка И показывает направление качения сферических тел 2, стрелка Ж показывает направление прецессионного движения сферических тел 2. Величина j расстояние от О до 0. На кадре II это расстояние меньше в силу того, что через некоторое время часть кинетической и потенциальной энергии израсходована системой н.а работу (трение - качение). На кадре III р минимально, при этом прецессионная орбита (стрелка Ж) сферических тел 2 захватила центр параболоида 0. На кадре IV величина 0,что соответствует совпадению центров переносного и прецессионного движения. Далее движение происходит относительно центра 0-0 до смыкания и остановки сферических тел 2, что соответствует кадру V. План скоростей движения сферических тел 2 по внутренней плоскости параболоида - корпуса 1 представлен на фиг.5, здесь - вектор угловой скорости переносного движения-, uj вектор угловой скорости прецессионного движения, u),g- вектор угловой скорости качения (поворотного движения ) сферических тел, стрелка Е направление переносного движения, стрелка Ж - направление прецессионного движения, стрелка И направление качения (.поворотного) движения о По результатам многократных экспериментов и из фиг.5 следует, что прецессионное-движение группы сферических тел на пло.скости параболоида подчинено следующему условию. Если смотреть из точки О в точку О и при этом переносное движение (стрелка Е) направлено по часовой стрелке в плоскости земли, то вращеие прецессионного движения (стрелка ) так же направлено по часовой стрелке. Если переносное движение 7 (стрелка Е) направлено против часовой стрелки, то вращение прецессионного движения (стрелка Ж) так же будет направлено против часовой стрелки, одновременно поворотные движения (стрелки и) сферических тел будут направлены в обратную сторону. Эквивалентность энергий катящихся по окружности тел разной массы с оди наковой переносной угловой скоростью относительно центра этой окруж Г, , ности уясняется из фиг.о и из того обстоятельства, что сферические тела разной массы, запущенные группой с одной орбиты, достигают дна параболоида и останавливаются одновременно На какую величину превосходит радиус Г- 7 г , на ту же величину R больше Е. Кроме того, угловая скорость поворотного движения (качения) пов1 тела с меньшим радиусом г больше угловой скорости поворотного движения to РОВ 2 (качения) тела с большим радиусом т, В силу этого, их энергии одинаковы. Демонстрацию параметрического резонанса изохронной ротации произ-. водят в два приема.. Вначале учащимся предлагают вывести уравнение парамет рического резонанса изохронной ротации из основного уравнения изохронной ротации (1 ). Вывод уравнения производят соглас но фиг.З. Для этого проецируют силу F на прямую, являющуюся продолжением силы F(,, и получают силу К , которая равна , 1 (17) J - . Sin j3 Подставив /3 J( - у , получим з -Бц sing-cos-j- (18) или 3 -m g sin у cos yi. (19) Кинетическая энергия сферического тела 2, движущегося по орбите, радиу сом R равна с- mV ujVR2 t-y 2- Подставив значение to из уравнения (1.3), получим где Е - кинетическая энергия ротации L - момент количества движения; m - масса сферического тела 2; R - текущее значение радиуса орбиты . 608 Потенциальная энергия сферического тела равна -и mgh-siny cos . (22) Подставив значение h, из уравнения (11) получим: и mgKE sinycos у (23) Полая энергия изохронной ротации по модулю равна: j- m kR SingfCosy-fQ (.24-) где первое слагаемое - кинетическая Энергия; второе слагаемое - потенциальная энергия; третье слагаемое - работа на пре одоление трения. Уравнение (24) есть уравнение параметрического резонанса ротации. Уменьшение радиуса R в первом слагаемом приводит к пополнению кинетической энергии за счет уменьшения второго слагаемого - потенциальной энергии, в то время как сама кинетическая энергия переходит в работу по преодолению сил трения. На данном приборе о параметрическом резонансе изохронной ротации судят по интервалу времени ротации от t JJ - начало отсчета до t - конец движения сфе1Уического тела 2, т.е. исследуется интегральная плотность энергии за промежуток времени to - Г/ L 2 -no/vK lr pZ Sing cosy -aldR (2F) Демонстрацию параметрического резонанса изохронной ротации производят двумя опытами. Учащийся замыкает первый ключ 11 (фиг.1), а затем запускает сферическое тело 2 по круговой орбите в первьй корпус 1. Как только сферическое тело 2 достигнет орбиты радиусом , оно пересечет луч света от осветителя 7 и атчик 9 запустит таймер 12. Таймер учащийся останавливает вручную. Как только сферическое тело, остигнув дна, остановится, показание f таймера 12 записывается. Учащийся выключает первый ключ 11, ключает второй ключ 13 и устанавлиает таймер 12 в нулевое положение. атем запускает то же сферическое ело 2 во второй корпус 6,
9П
IN л Toju.Ko Сферическое тело 2 досгр( орбиты радиусом /j ,оно пегн:сечет луч света от осветителя 8 . датчик 9 запустит таймер, Остялавлпвает секундомер учашийся вручную.
как только сферическое- тело 2 новится.
Показание tz таймера 12 записывается, а временные интервалы пергзого и второго опытов сравниваются.
Из сравнения видно, что
t, t,(26)
Следовательно, потенциальная энергия поднятого сферического тела 2 на высоту hi переходит согласно уравнению (24) в кинетическую энергию изохронной ротации.
1906010
Во втором опытс потенциальная энер гия отсутствует Б связи с тем, что hj -О и поэтому ., емя ротация tj меньше времени ротгга; и 1 , в первом опыте.
Применение прибора позволяет раскрыть физическую сущность ягшения параметрический резонанс poiHi-HH, Оно заключается в том, что работа, затрачиваемая на переход тела с внешней (. 6оль;;1ей) орбиты на внутреннюю (меньшую) орбиту, преобразуется в кинетическую энергию ротации.
Использование данного изобретения noBbmiaeT наглядность демонстрации изохронной ротации.
г,
Фиг.2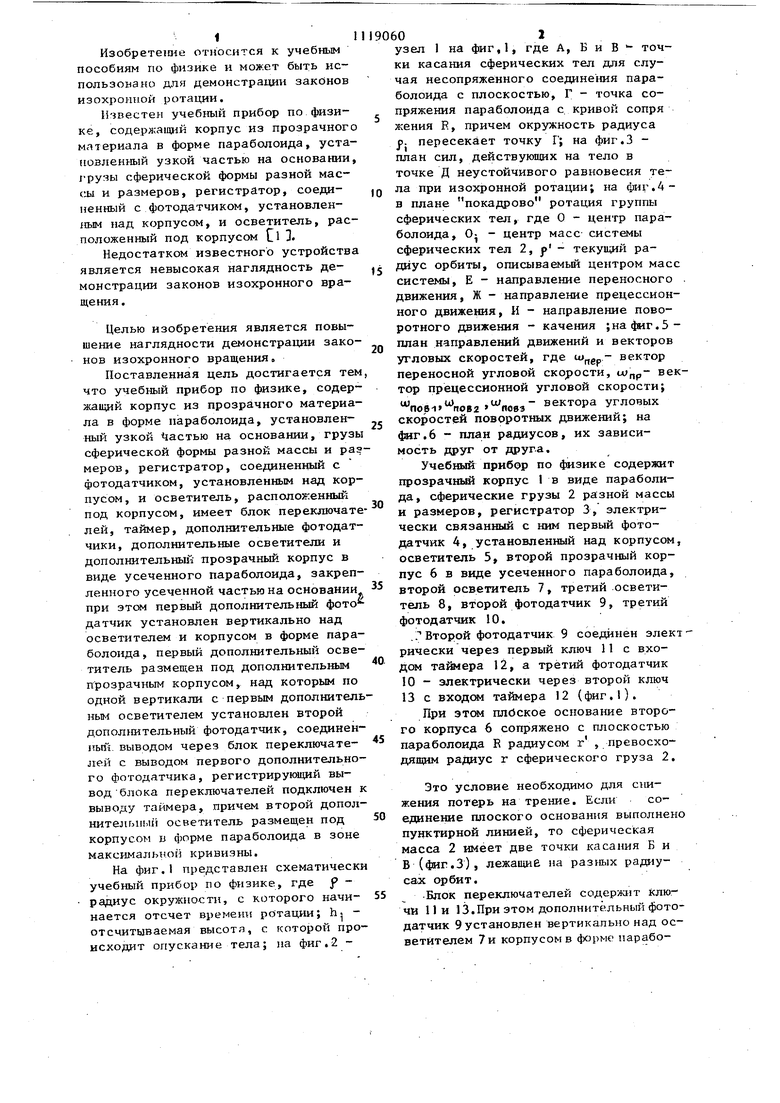
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по физике | 1981 |
|
SU1001155A1 |
| Учебный прибор по физике | 1981 |
|
SU1043724A1 |
| Учебный прибор по физике | 1980 |
|
SU964703A1 |
| Учебный прибор по физике | 1982 |
|
SU1027751A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
| Устройство для измерения ускорения силы тяжести | 1982 |
|
SU1132275A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| Центробежный регулятор скорости вала | 1982 |
|
SU1104476A1 |
| Центробежный регулятор скорости | 1979 |
|
SU962878A1 |
УЧЕБКЬЙ ПРИБОР ПО ФИЗИКЕ, содержащий корпус из прозрачного материала в форме параболоида,, установленный узкой частью на основании, грузы сферической формы разной массы и размеров, регистратор, соединенный с фотодатчиком, установленным над корпусом, и осветитель, расположенный под корпусом, отличающийся тем, что, с целью повьшения наглядности демонстрации законов изохронного вращения, он имеет блок переключателей, таймер, дополнительные фотодатчики, дополнительные осветители и дополнительный прозрачный корпус в виде усеченного параболоида закрепленного усеченной частью на основании, при этом первый дополнительный фотодатчик установлен вертикально над осветителем и корпусом в форме параболоида, первый дополнительный осветитель размещен под дополнительным прозрачным корпусом, над которым по одной.вертикали с первым дополнительным осветителем установлен второй дополнительный фотодатчик, соединенный выводом через блок переключателей с выводом первого дополнительного фотодатчика, регистрирующий вывод блока переключателей подключен (Л к выводу таймера, причем второй дополнительный осветитель размещен под корпусом в форме параболоида в зоне максимальной кривизны. со о О5 / / л (pue.f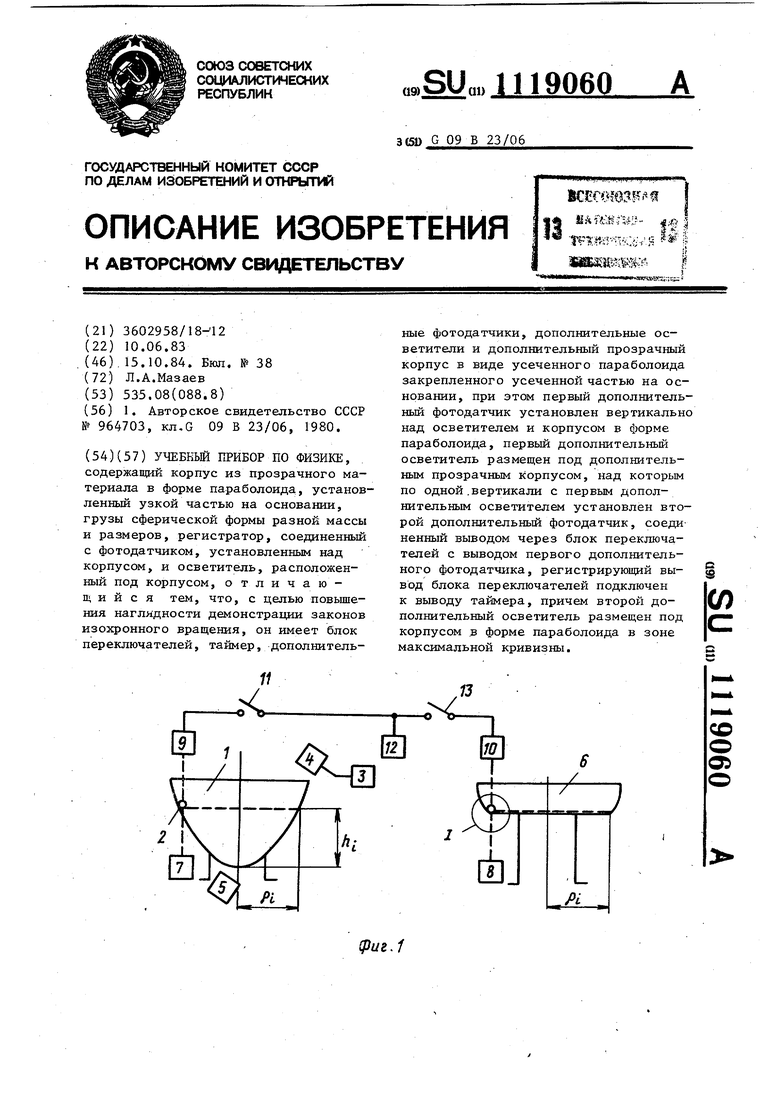
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Учебный прибор по физике | 1980 |
|
SU964703A1 |
