Изобретение относится к наглядным пособиям и может быть использовано для демонстрации гироскопических явлений и, в частности, как в учебных целях при изучении гироскопических приборов, так и в демонстрационных целях для наглядного показа работы гироскопического маятника.
Аналогами предлагаемого изобретения является множество волчков различного вида (юла, кубарь и т.д.). У каждого из волчков конструктивно можно выделить симметричное тело-диск с заостренным стержнем, пронизывающим диск и скрепленным с ним неподвижно. При этом диск и заостренный стержень имеют общую ось материальной симметрии (она направлена вдоль оси стержня перпендикулярно плоскости диска). Волчок устанавливают заостренным стержнем на опорную поверхность и за стержень приводят в быстрое вращение (А.С. №1254532, G09B 23/08, бюл. №32 от 30.08.83).
Известен также демонстрационный волчок, содержащий подпятник, колоколообразное тело и заостренный стержень. Колоколообразное тело и заостренный стержень соединены с возможностью перемещения острия вдоль оси симметрии диска и фиксации их взаимного расположения (патент №2156502 от 02.11.98, G09B 23/06, А63Н 1/10, опубл. 20.09.2000). Недостатками указанных аналогов являются ограниченные демонстрационные характеристики (виды движений) и ограниченное время демонстрации, обусловленное большим аэродинамическим сопротивлением.
В качестве прототипа взят трехстепенной гироскоп гироагрегата ГА-1 курсовой системы КС-6 с герметичным газонаполненным гироузлом. При этом герметичный гироузел, имеющий гермовводы, соединенные с трехфазным асинхронным статором гиромотора, своими полуосями помещен в шарикоподшипниковые опоры наружной рамы, которая имеет свои полуоси. Подача напряжения к статору гиромотора осуществляется через разъем питания, который установлен на корпусе.
Однако в такой конструктивной конфигурации он не способен обеспечить необходимые демонстрационные свойства - набор прецессионных движений, особый вид движения наружной рамы, при длительном времени демонстрации, что очень важно при проведении подобных демонстраций.
Технический результат заявляемого изобретения состоит в расширении демонстрационных возможностей, заключаемых в придании новых движений и в увеличении времени демонстрации.
Технический результат достигается тем, что в демонстрационном гироскопе, содержащем трехстепенной гироскоп с герметичным гироузлом с тремя гермовводами для подвода питания к статору гиромотора, конструктивно помещенным в наружную раму с двумя полуосями, на которой установлен разъем питания от внешнего источника, три выходных контакта которого соединены с тремя гермовводами гироузла, новым является то, что гироузел жестко соединен с наружной рамой таким образом, чтобы ось вращения ротора гиромотора совпадала по направлению с полуосями наружной рамы, в которых имеются сквозные отверстия и конец одной полуоси имеет полусферическую, а второй - коническую форму, при этом на наружной раме размещен внутренний источник питания, а в неподвижной части разъема установлен нормально замкнутый контакт, состояние которого зависит от взаимного положения подвижной части разъема питания относительно неподвижной.
Внутренний источник питания содержит таймер, управляемый коммутатор, преобразователь напряжения и аккумулятор, выход которого через нормально замкнутый контакт разъема питания соединен одновременно с входами таймера и преобразователя напряжения, три сигнальных выхода которого подключены к трем сигнальным входам управляемого коммутатора, три сигнальных выхода которого соединены с тремя гермовводами гироузла, а управляемый вход управляемого коммутатора подключен к выходу таймера.
Сущность заявленного изобретения поясняется на фиг.1 - фиг.5, где представлен вариант реализации демонстрационного гироскопа и схемы, поясняющие работу.
На фиг.1 изображен эскиз конструкции, где приняты следующие обозначения:
1 - гиромотор (выделен пунктиром);
1.1 - вал статора;
1.2 - подшипники ротора;
1.3 - статор с пакетом железа и обмоткой;
1.4 - крышка гиромотора (две);
1.5 - обод ротора;
1.6 - обмотка ротора короткозамкнутого типа;
2 - кожух гироузла;
3 - «сухарик»;
3.1 - винты крепления вала статора;
4, 5 - крышки гироузла;
6 - гермовводы;
7 - капиллярная трубка (для заполнения гелием);
8 - наружная рамка;
9, 10 - полуоси;
вторичный источник питания автономный;
11 - винты крепления гироузла к наружной раме;
12.1 - подвижная часть разъема питания;
12.2 - неподвижная часть разъема питания;
13 - постоянный магнит;
14 - геркон (с нормально замкнутым контактом);
15 - подпятник;
16 - внешний источник питания (стационарный) от сети (например, преобразует UП=220 В, f=50 Гц в трехфазное питание гиромотора UГM=12-18 В, f=400 Гц);
17 - аккумулятор;
18 - таймер;
19 - преобразователь напряжения;
20 - управляемый коммутатор.
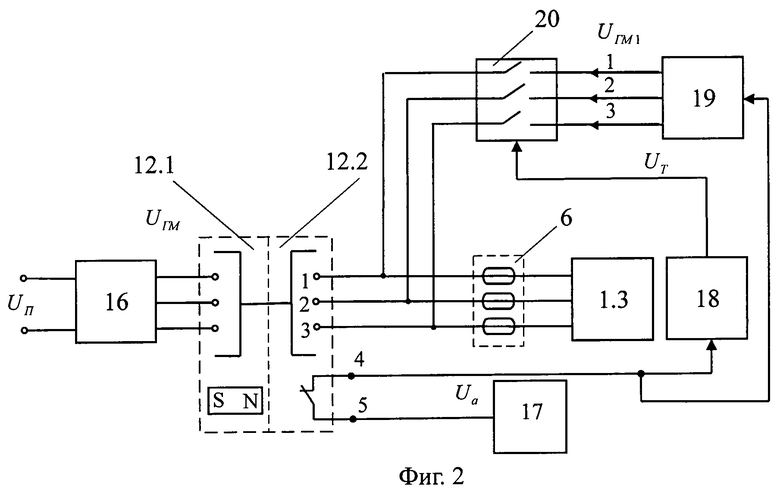
На фиг.2 представлена блок-схема электрических соединений внутреннего источника питания демонстрационного гироскопа, где дополнительно приняты следующие обозначения:
UП - напряжение сети;
ПГМ - напряжение гиромотора от внешнего источника питания;
UГМ1 - напряжение гиромотора от внутреннего источника питания;
Ua - выходное напряжение аккумулятора;
UT - напряжение таймера.
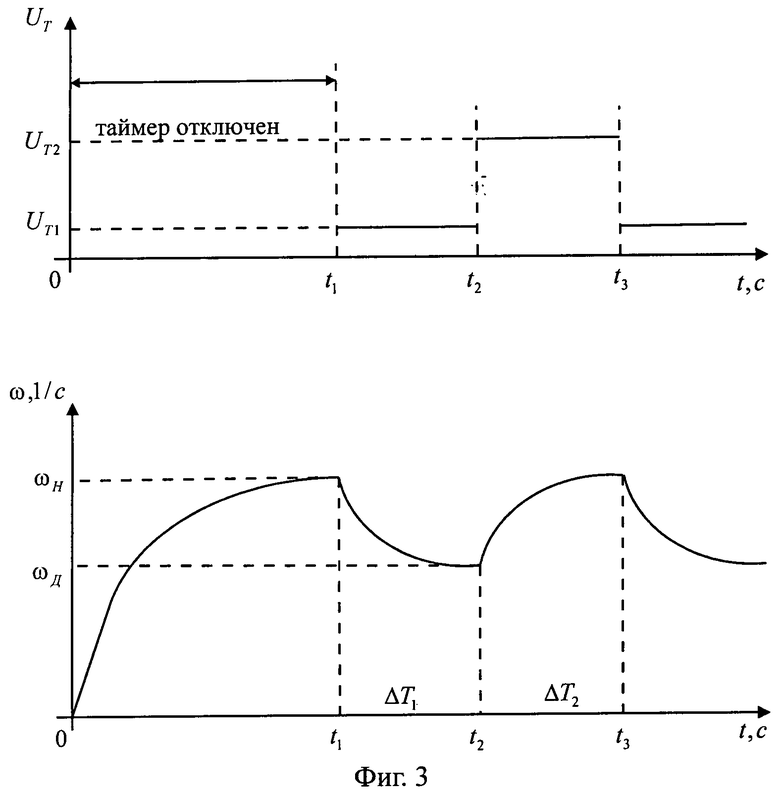
На фиг.3 изображены графики зависимостей UT(t) и ω(t).
На интервале времени 0-t1 таймер отключен, питание гиромотора осуществляется от внешнего источника питания. В момент t1 отключаем сеть, и гиромотор подключается к внутреннему источнику питания. На интервале ΔT1=t1-t2 - выбег ротора гиромотора, на котором падают обороты до ωД за счет аэродинамического сопротивления ротора и трения в шарикоподшипниках подвеса. В момент t2 автоматически подключается внутренний источник питания, и ротор начинает набирать обороты до ωH. В момент времени t3 внутренний источник питания автоматически отключается, и ротор снова начинает терять обороты и т.д.
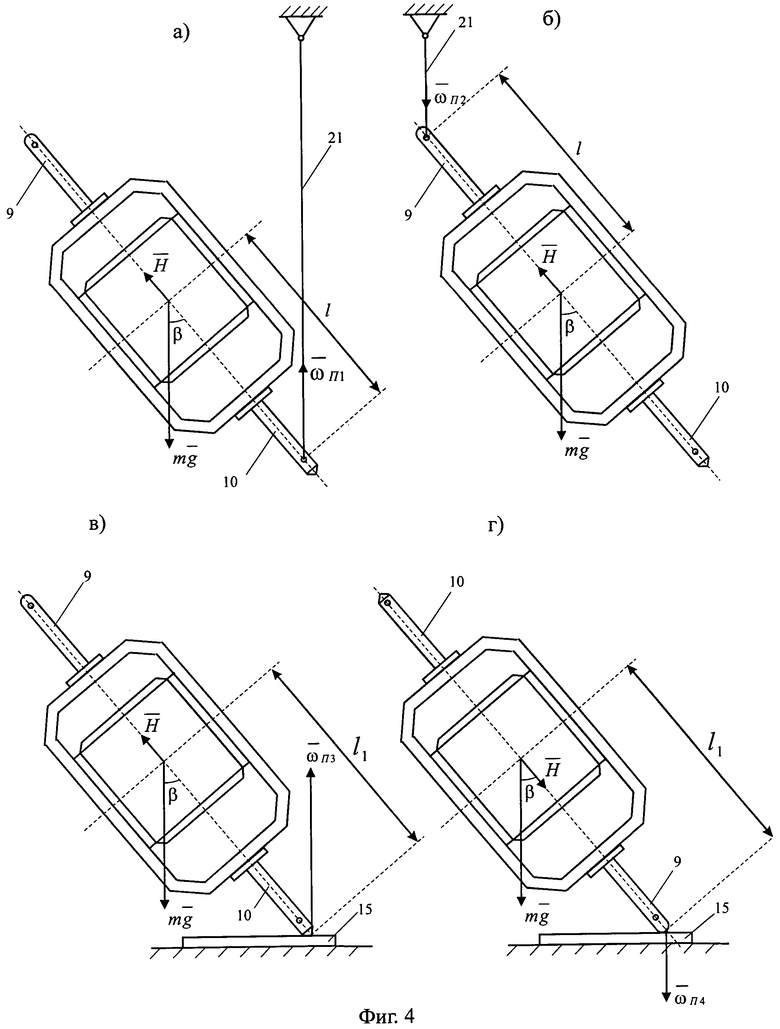
На фиг.4 приведены варианты демонстрации прецессии на гибкой нити (леске) 21 - фиг.4а, фиг.4б и на жесткой пяте 15 - фиг.4в, фиг.4г, где приняты обозначения:
 - вектор кинетического момента;
- вектор кинетического момента;
 - вес гироскопа;
- вес гироскопа;
β - угол между осью полуосей и вертикалью (вектором  );
);
l, l1 - расстояние от центра до центров отверстий и до конца полуоси;
 - вектора угловых скоростей прецессии.
- вектора угловых скоростей прецессии.
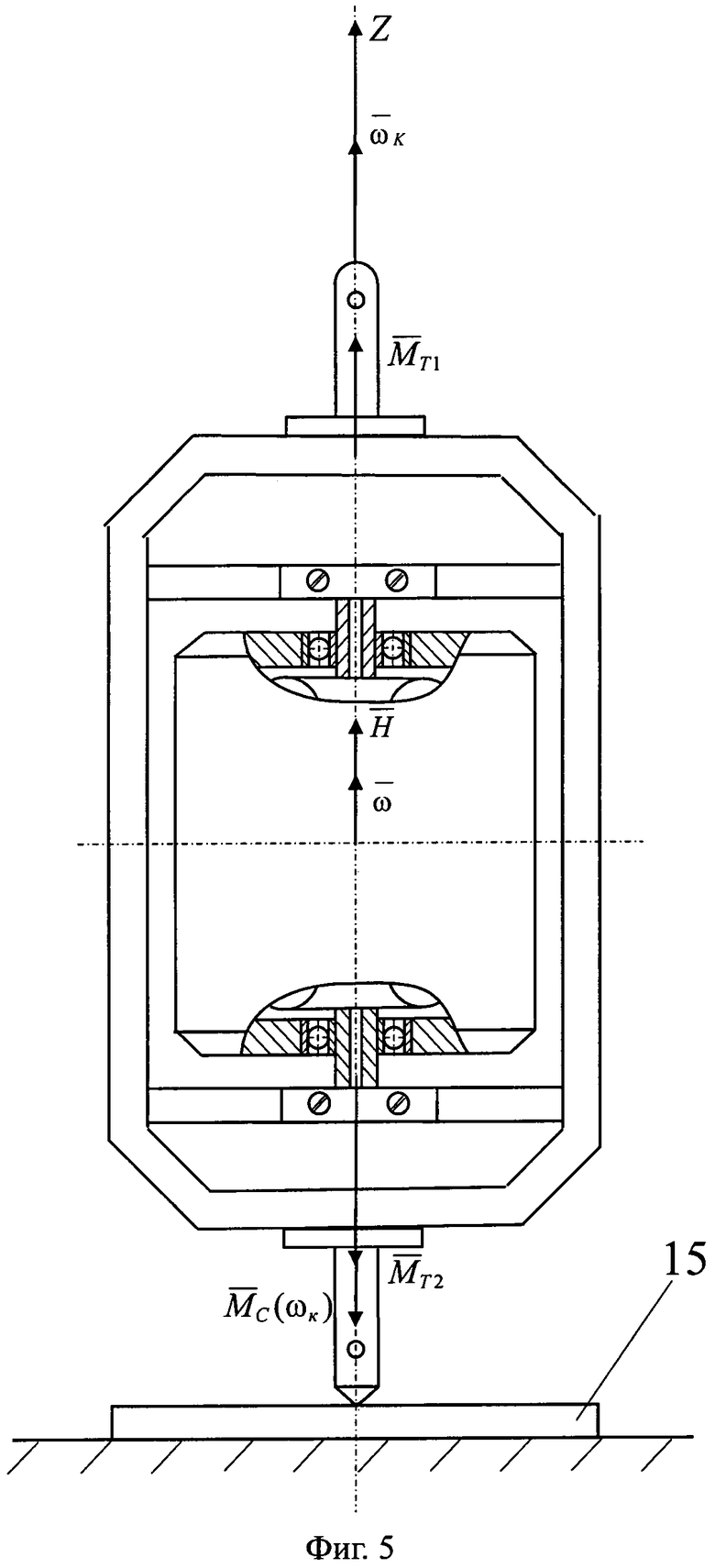
На фиг.5 показана кинематическая схема демонстрационного гироскопа с поясняющими элементами для составления уравнения движения наружной рамы в режиме демонстрации в вертикальном положении:
Z - ось симметрии полуосей (параллельна );
 ,
,  - векторы угловых скоростей ротора гиромотора и наружной рамы гироскопа относительно пяты;
- векторы угловых скоростей ротора гиромотора и наружной рамы гироскопа относительно пяты;
 ,
,  - моменты трения в шарикоподшипниках и в пяте;
- моменты трения в шарикоподшипниках и в пяте;
MC(ωк) - момент сопротивления наружной рамы с установленными элементами о воздух.
Описание конструкции
Гиромотор 1 с соответствующими элементами конструкции 1.1-1.6 выполнен по обращенной схеме и помещен в кожух 2, герметичность которого создают крышки 4 и 5. На крышке 4 имеется капиллярная трубка 7 (для заполнения гелием), на крышке 5 - три гермоввода 6 для подвода питания к статору 1.3, ось которого 1.1 неподвижно фиксируется в кожухе при помощи «сухариков» 3 и винтов 3.1. Питание к статору 1.3 от гермовводов осуществляется через полую ось статора 1.1. В данной конструкции под гироузлом будем понимать элементы 1-7. Гироузел жестко крепится к наружной раме 8 с помощью винтов 11 таким образом, чтобы ось статора 1.1 была параллельна полуосям 9-10 с отверстиями, оси симметрии которых перпендикулярны осям симметрии полуосей, причем полуось 9 заканчивается полусферой, а полуось 10 - конусом, при этом будет разное пятно контакта с пятой 15, а следовательно, будет различным момент сухого трения. Одной из особенностей гироскопа является конструкция разъема питания: подвижная часть разъема 12.1 содержит три штырька для подвода питания и устройство размыкания контакта (например, постоянный магнит 13), расположенного в неподвижной части разъема 12.2 (например, геркон 14 с нормально замкнутым контактом). Выходные штырьки геркона 4 и 5 соединены с внутренним источником питания (см. фиг.2), который состоит из: аккумулятора 17, таймера 18, преобразователя напряжений 19 (преобразует постоянное напряжение в трехфазное), трехканального управляемого коммутатора 20, которые конструктивно размещаются на наружной раме и гироузле. Внешний источник питания 16 является преобразователем напряжения сети в заданное трехфазное напряжение, или другой преобразователь, удобный для демонстрации. Кроме того, для выключения аккумулятора имеется технологическая заглушка (имитатор подвижной части разъема 12.1), которая вставляется в разъем 12.2, когда демонстрация закончена.
Демонстрация гироскопических эффектов
Подготовка демонстрационного гироскопа к работе
После предыдущей демонстрации имитатор подвижной части 12.1 разъема питания (технологическая заглушка) должен быть вставлен в неподвижную часть 12.2. При этом магнит 13 притягивает подвижный контакт геркона 14 и цепь питания таймера 18 разрывается. Следовательно UT=0, контакты управляемого коммутатора 20 будут разомкнуты.
Для начала демонстрации гиромотор необходимо раскрутить до номинальной частоты вращения ωН, т.е. создать номинальный кинетический момент Н. Для этого из неподвижной части разъема 12.2 вынимают имитатор подвижной части разъема 12.1, вставляют штатную подвижную часть разъема 12.1, которая соединена жгутом с внешним источником питания 16 и включают его. Трехфазное напряжение UГМ через гермовводы 6 поступает на статор 1.3, создается вращающееся магнитное поле, и ротор 1.5 начинает набирать обороты. Время набора ωН известно (на фиг.3 - это время t1). Далее через t1 отсоединяем подвижную часть 12.1 разъема питания. При этом контакт 14 замыкается и аккумулятор 17 подает напряжение Ua на таймер 18 и преобразователь напряжений 19, который начинает вырабатывать меандр импульсов. На интервале времени ΔТ1 (нечетном) вырабатывается напряжение UT1 низкого уровня и контакты коммутатора 20 будут разомкнуты, а на интервале времени ΔT2 (четном) вырабатывается напряжение UT2 высокого уровня и контакты коммутатора 20 будут замкнуты. Т.е. в течение ΔТ1 гиромотор будет терять обороты, в течение ΔТ2 гиромотор будет подкручиваться за счет напряжения UГМ1 преобразователя напряжений и ротор начнет набирать обороты. Таким образом, будет поддерживаться среднее значение частоты вращения ротора, и среднее значение кинетического момента, которое позволит проводить демонстрацию заданное время без подключения к внешнему источнику питания, что особенно удобно.
При демонстрации гироскопа возможны четыре варианта.
Демонстрация прецессии
Вариант 1. Демонстрация на гибкой нити 21 фиг.4а-фиг.4б.
В этом варианте возможна демонстрация прямой и обратной прецессий гироскопа. При этом, используя правило прецессии, определяют направление вектора (допустим, направлен в сторону полуоси с полусферическим концом).
Прямая прецессия - прецессия в одну сторону независимо от угла β при заданном направлении .
Вставляем гибкую нить (ГН) 21 в отверстие полуоси 10 с коническим концом, задаем произвольный угол β, а второй конец оператор держит в руке или подвешивает к неподвижной опоре, как показано на фиг.4а. Для качественной демонстрации концы ГН должны иметь специальную заделку, которая не позволяет ГН скручиваться.
Угловая скорость прецессии ωП1 определяется в соответствии с теоремой о кинетическом моменте и правилом Резаля

где  - момент гироскопа относительно точки подвеса;
- момент гироскопа относительно точки подвеса;
 - линейная скорость конца вектора
- линейная скорость конца вектора  Из двух векторных равенств можно составить одно скалярное
Из двух векторных равенств можно составить одно скалярное
 ,
,
из которого следует, что угловая скорость прецессии не зависит от угла β
Обратная прецессия - прецессия в обратную сторону независимо от угла β при заданном направлении .
Вставляем гибкую нить (ГН) 21 в отверстие полуоси 9 со сферическим концом, задаем произвольный угол β, а второй конец оператор держит в руке или подвешивает к неподвижной опоре, как показано на фиг.4б.
Гироскоп будет прецессировать с угловой скоростью ωП2, определяемой выражением, но в противоположную сторону прямой прецессии
Вариант 2. Демонстрация на пяте 15 фиг.4в - фиг.4г.
В отличие от демонстрации на ГН демонстрацию на пяте проводят иначе: гироскоп ставят к вертикали под углом β сначала, например, на полуось с коническим концом 10 (см. фиг.4в), а потом гироскоп переворачивают на 180° и ставят на полуось со сферическим концом 9 (см. фиг.4г).
При этом угловые скорости будут иметь противоположную направленность

Характер движения гироскопа будет также зависеть от материала пяты.
Вариант 3. Демонстрация на пальце оператора.
Расположить руку так: большой палец отвести в сторону, внешнюю фалангу расположить горизонтально, остальные четыре пальца сжать в кулак. Руку удерживать твердо и устойчиво, не перемещать в стороны. На «подушечку» большого пальца полуосью с полусферическим концом установить гироскоп, который начнет прецессировать. Такая прецессия имеет самый эффектный демонстрационный показ. Этот вариант и другие приведены в видеофильме DEM_GYRO.wmv, который имеется на прилагаемом CD диске.
Демонстрация гироскопического момента.
При этом гироскоп берут двумя руками за места крепления полуосей (за полуоси брать нежелательно) и пытаются последовательно резко повернуть относительно одной из осей: оси симметрии полуосей - вокруг вектора кинетического момента; вокруг оси, перпендикулярной вектору кинетического момента. В первом случае оператор не будет испытывать сопротивления, а во втором оператор будет испытывать инерционное сопротивление в виде гироскопического момента - гироскоп будет стремиться «вырваться» из рук оператора.
Демонстрация вертикального вращения.
Если при демонстрации прецессии на плоской пяте полуоси выставить вертикально, то можно наблюдать совершенно новый демонстрационный эффект: наружная рамка вокруг своих полуосей начинает раскручиваться до значительной скорости (установить необходимо на полуось с коническим концом).
Угловое движение гироскопа в соответствии с фиг.5 в этом случае будет описываться уравнениями:
уравнение движения наружной рамы

уравнение движения ротора

где JK, JP - моменты инерции наружной рамки вместе с установленными на ней элементами (за исключением ротора гиромотора) и ротора гиромотора; ωK, ω - угловые скорости наружной рамы и ротора гиромотора: MT1, MT2 - моменты сил сухого трения в шарикоподшипниках гиромотора и в подпятнике; MC(ωK), MC(ω) - моменты сопротивления наружной рамы о воздух и ротора гиромотора о газовую среду.
Условие начала движения |MT1|>|MT2|. Тогда (2) и (3) при условии, что ω>>ωK принимают вид 

Рассмотрим установившийся режим для наружной рамки.
В этом случае  , тогда
, тогда
 .
.
В предположении, что момент сопротивления линейно зависит от ωK
 ,
,
тогда угловая скорость ωK определяется выражением
Эффект поведения гироскопа состоит в довольно быстром вращении наружной рамы вокруг своей полуоси, на которой он установлен относительно быстро вращающегося ротора. Причина движения - момент сил сухого трения в шарикоподшипниках гиромотора, который ротор тормозит, а наружную раму раскручивает.
Демонстрация вращения в этом случае приведена в видеофильме DEM_GYRO.wmv.
После завершения демонстрации в неподвижную часть разъема 12.2 вставляют имитатор подвижной части разъема 12.1, чтобы отключить аккумулятор, иначе он будет непрерывно работать на таймер и преобразователь напряжения и разрядится.
Реализация демонстрационного гироскопа.
Для правильного построения демонстрационного гироскопа необходимо выбрать герметичный газонаполненный гироузел с напряжением питания до 18 В и установившимся током 100-200 mA. Если демонстрация будет продолжаться 1 час, то емкости аккумулятора Q=1000-2000 mAh вполне будет достаточно для нескольких демонстраций. Малогабаритные аккумуляторы такой Q широко применяются в бытовой технике. Реализация электронных узлов при современном уровне миниатюризации не составляет труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Установка для снятия механических характеристик гиромотора | 2019 |
|
RU2701458C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
Изобретение относится к наглядным пособиям и может быть использовано для демонстрации гироскопических явлений. Гироузел жестко соединен с наружной рамой таким образом, чтобы ось вращения ротора гиромотора совпадала по направлению с полуосями наружной рамы. В полуосях выполнены сквозные отверстия. Конец одной полуоси имеет полусферическую форму, а второй - коническую форму. На наружной раме размещен внутренний источник питания. В неподвижной части разъема установлен нормально замкнутый контакт, состояние которого зависит от взаимного положения подвижной части разъема питания относительно неподвижной. Внутренний источник питания содержит таймер, управляемый коммутатор, преобразователь напряжения и аккумулятор. Выход аккумулятора соединен через нормально замкнутый контакт разъема питания одновременно с входами таймера и преобразователя напряжения. Три сигнальных выхода преобразователя напряжения подключены к трем сигнальным входам управляемого коммутатора. Три сигнальных выхода управляемого коммутатора соединены с тремя гермовводами гироузла. Управляемый вход управляемого коммутатора подключен к выходу таймера. Техническим результатом изобретения является расширение демонстрационных возможностей за счет создания новых движений и увеличение времени демонстрации. 1 з.п. ф-лы, 5 ил.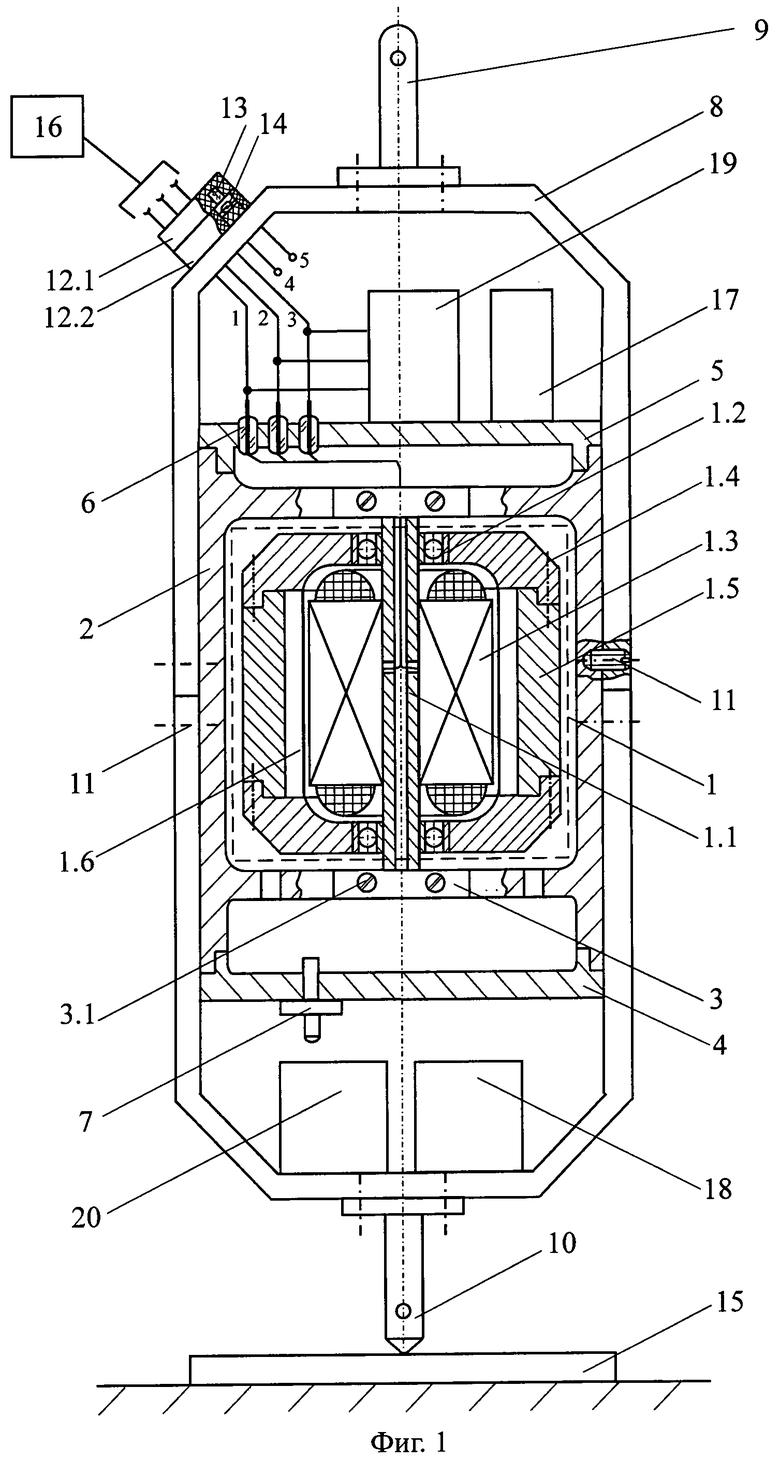
1. Демонстрационный гироскоп, содержащий трехстепенной гироскоп с герметичным гироузлом с тремя гермовводами для подвода питания к статору гиромотора, конструктивно помещенным в наружную раму с двумя полуосями, на которой установлен разъем питания от внешнего источника, три выходных контакта которого соединены с тремя гермовводами гироузла, отличающийся тем, что гироузел жестко соединен с наружной рамой таким образом, чтобы ось вращения ротора гиромотора совпадала по направлению с полуосями наружной рамы, в которых имеются сквозные отверстия и конец одной полуоси имеет полусферическую, а второй - коническую форму, при этом на наружной раме размещен внутренний источник питания, а в неподвижной части разъема установлен нормально замкнутый контакт, состояние которого зависит от взаимного положения подвижной части разъема питания относительно неподвижной.
2. Демонстрационный гироскоп по п.1, отличающийся тем, что внутренний источник питания содержит таймер, управляемый коммутатор, преобразователь напряжения и аккумулятор, выход которого через нормально замкнутый контакт разъема питания соединен одновременно с входами таймера и преобразователя напряжения, три сигнальных выхода которого подключены к трем сигнальным входам управляемого коммутатора, три сигнальных выхода которого соединены с тремя гермовводами гироузла, а управляемый вход управляемого коммутатора подключен к выходу таймера.
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Прибор для демонстрации гироскопических явлений | 1984 |
|
SU1251156A1 |
| CN 2059500 U, 18.07.1990 | |||
| US 4304121 A, 08.12.1981 | |||
| EP 1304546 A1, 23.04.2003. | |||

