(54) ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР СКОРОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| Центробежный регулятор скорости вала | 1982 |
|
SU1104476A1 |
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
| Центробежный регулятор скорости | 1979 |
|
SU842734A1 |
| Центробежный регулятор скорости вала | 1984 |
|
SU1170436A1 |
| Центробежный регулятор скорости | 1978 |
|
SU763861A1 |
| Центробежный регулятор скорости вращения | 1985 |
|
SU1273890A1 |
| Учебный прибор по физике | 1983 |
|
SU1119060A1 |
| Учебный прибор по физике | 1981 |
|
SU1001155A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
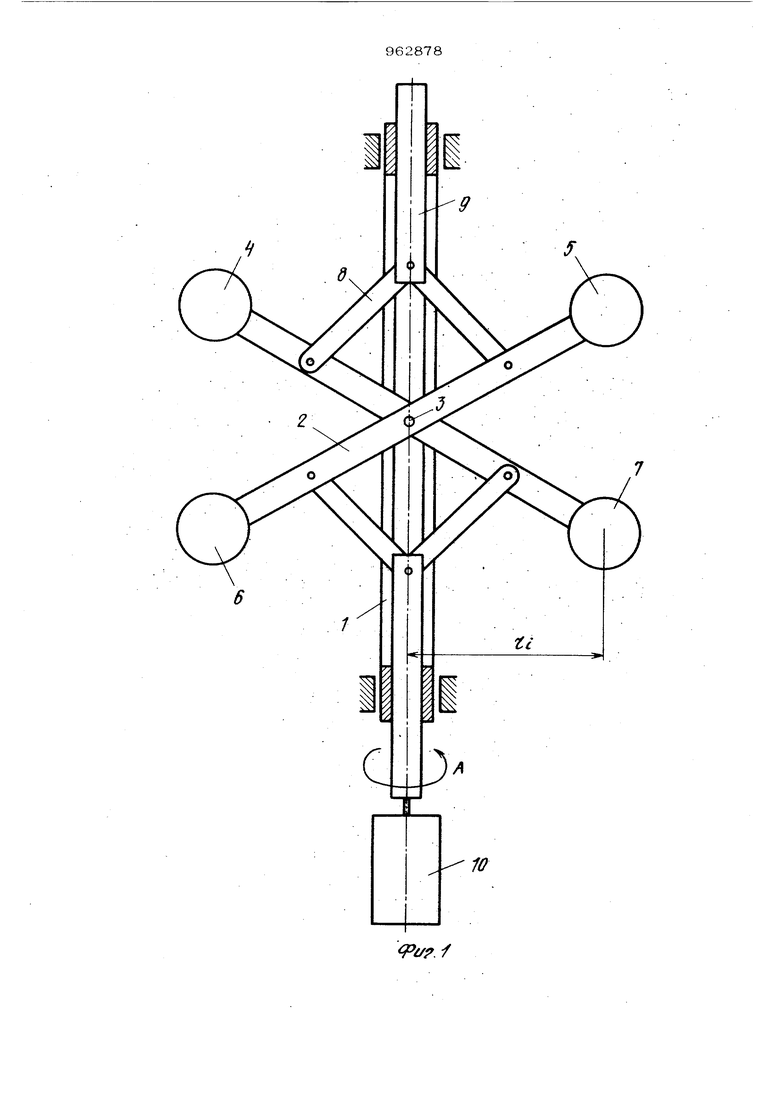
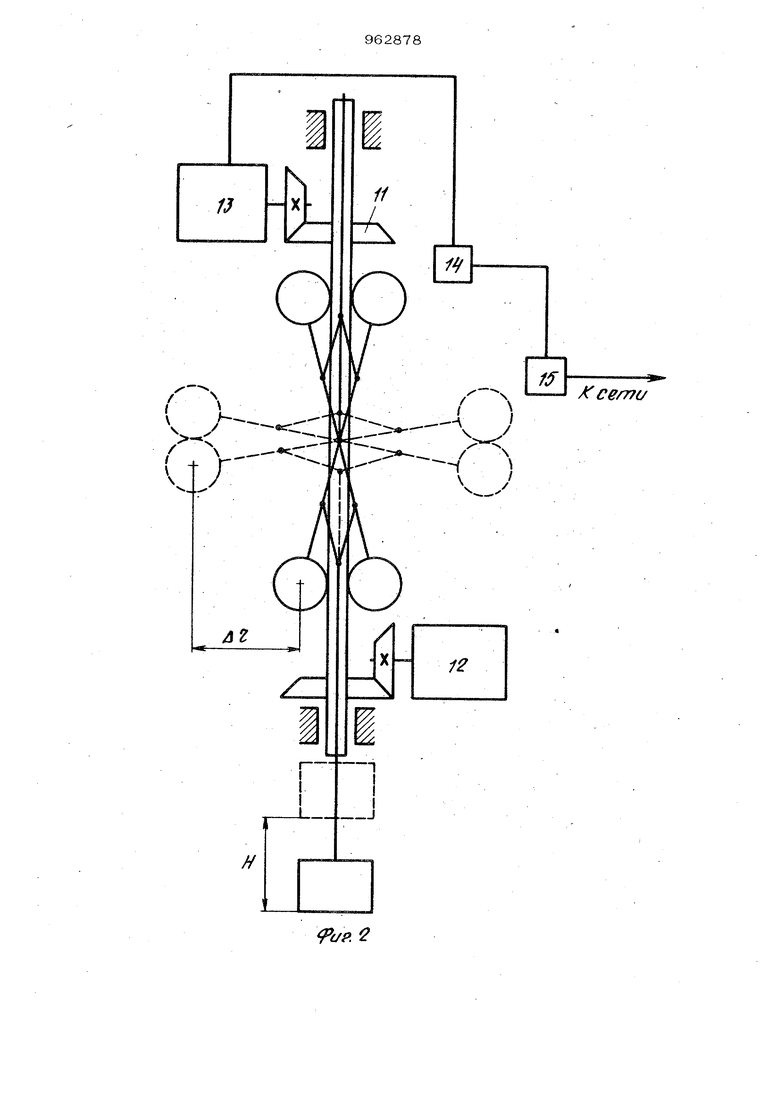
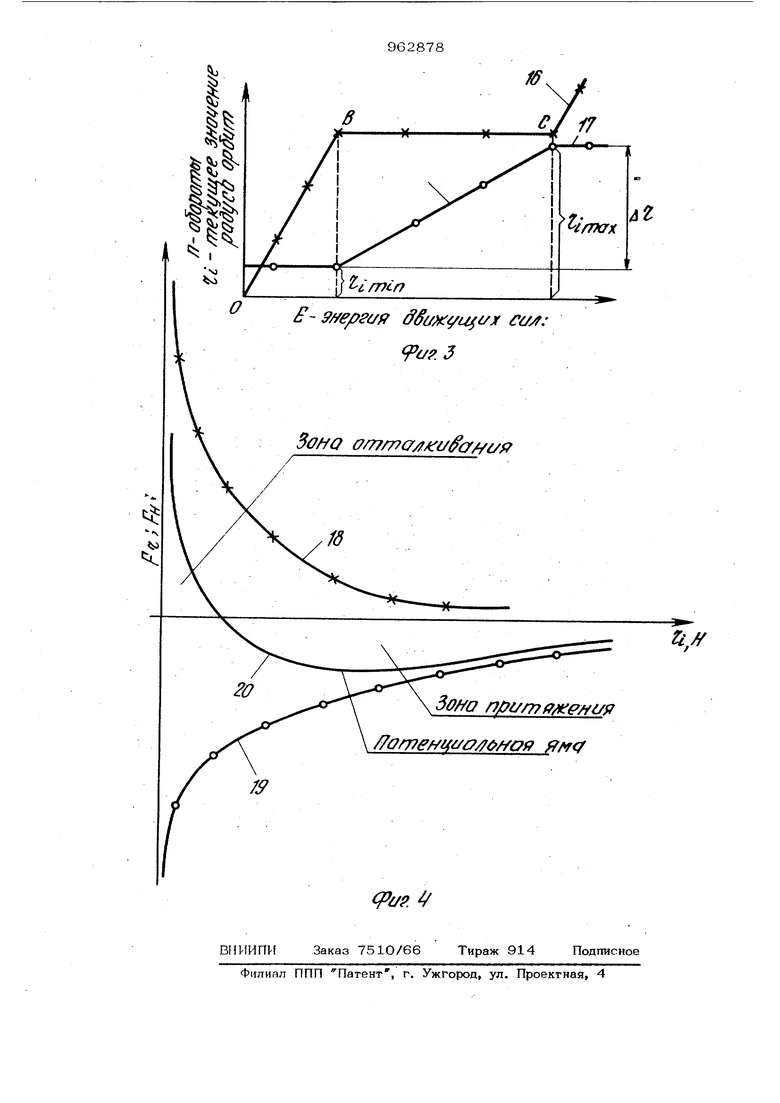
Изобретение относится к центробежным регуляторам скорости и может быть использовано дгш автоматического регули рования скорости ведущего звена машин и приборов. Известен центробежный регулятор, ко- торый состоит из в&ла вращения, платфор мы с двумя взаимно перпендикулярными направляющими, двух инерционных масс, одна из которых выполнена в виде электромагнита, двух сателлитов и четырех тяг l,. Недостатком данного устройства является сложность подачи электрического тока на вращающийся электромагнит и наличие источника питания для электромагнита. Наиболее близким по технической сущности к предлагаемому является центробежный регулятор скорости., содержащий вал вращения, инерционные массы с коромыслами 2}. . Недостатком известного устройства я ляется невозможйость получения стабиль ноГо вращательного Движения при больших усилиях.. Цель изобретения - повышение точности регулирования. Поставленная цель достигается тем, что в центробежном регуляторе скорости вал вращения выполнен в виде трубки с прорезями, в которых с возможностью перемещения расположены коромЬюла с инерционными массами, а коромысла установлены в средней части на щтифт и соединены подвижно шатунами с двумя плавающими оппозитными валами, на одном из которых установлен балластный груз. На фиг. 1 схематически изображен центробежный регулятор скорости ( Р.; промежуточный радиус орбит вращения масс); на фиг, 2 - схема привязки центробежного регулятора к двигателю и машине (дг- величина изменения радиуса орбит в диапазоне регулирования; Н - высота подъема балластного груза); на фиг. 3 - кривые зависимости оборотов и диаметр орбит инерционных масс от на фиг. 4 - криэнергии движущих сип; вые сил, Действующие на инерционные массы. Центробежный, регулятор скорости содержит вап 1 вращения с прорезями, в которых установлены два скрещенных коромысла 2, насаженные подвижно средней частью на штифт 3. Инерционные массы 4-7 укреплены на концах коромысел 2, которые в свою очередь попарно и подвижно соединены посредством четырех шатунов 8 с оппозит- ными плавающими валами 9, свободно пеIремещающиеся в полости вала 1. На нижнем вапе 9 укреплен балластный груз 10. Когда последний занимает нижнее положение, инерционные массы 47 примкнуты к валу 1, а когда балластный груз поднят на высоту Н, инерционные массы максимально удалены от оси вращения. Жесткость регулирования зависит от коэффициента обратной связи, равный коэффициент обратной связи; величина изменения радиуса орбит в диапазоне регулирования; высота подъема балластного груза. Оптимальный режим регулирования при . Центробежный регулятор через первую коническую передачу 11 кинематически соединен с двигателем 12, а через .-вторую коническую передачу - с. машиной 13 Двигатель 12 электрически соединен с датчиком 14 минимальной орбиты и с датчиком 15 максимальной орбиты в цепь. В исходном состоянии массы 4, 5 и 6, 7 попарно примкнуты к вапу 1 под действием балластного груза 10. Непременным условием нормальной работы цен робежного регулятора должно быть соотношение энергоемкостей двигателя, маши ны и самого регулятора . о,(2) -А ( 1 Р т.е. энергоемкость регулятора Ер должна в два или более раз превышать энер гоемкость двигателя Е и энергоемкост машины Е , причем двигатель должен об ладать тягловой характеристикой (мягкая пусковая характеристика). Центробежный регулятор скорости работает следующим образом. При подаче на устройство электрического тока датчик 14 минимальной орбиты 96 8 включает двигатель 12, который начинает ращать через первую коническую пару 11 регулятор по стрелке А с плавно нарастающими оборотами участок О-В криой 16 (фиг. 3). По достижении угловой корости заданного параметра стабилизации инерционные массы 4, 5 и 6, 7 начинают расходиться. Начало расхождения указанных масс соответствует минимальному радиусу орбиты г . . Расхождение масс обусловлено наличием центробежной силы2 mr. , 5; гдеF 0 - центробежная сила; UJ - угловая скорость; T П1. суммарная масса инерцион „Iонных масс 4-7; Г - радиус промежуточной орбиты. Момент количества движения для.минимальной орбиты равен 1 -rnin i гг)1П . где L min -минимальный момент личества движения; -угловая скорость; Ш и1д -ТПс+т,+ - суммарная масса инериионных масс 4-7; текущее значение радиуса орбиты, имеющее минимальное значение. Дальнейшее увеличение центробежной сипы F и момента количества движения I, .от действия движущих сил двигателя происходит не за счет увеличения угловой скорости и) а за счет увеличения радиуса Г; . По достижении инерционными массами 4-7 максимальной орбиты г поступает верхний предел стабилизации оборотов точка С (см. кривые 16 и 17), а датчик 15 максимальной орбиты отключает двигатель 12. Момент количества движения для максимальной орбиты равен roonnr где Urnax - момент количества движения, запасенный регулятором на максима пьно и орбите;- угловая скорость; .-«-mc- Tt 4суммарная масса инерци m. 5 онных масс 4-7; rnax текущее значение радиуса орбиты, имеющее максимальное значение. По достижении максимальной орбиты балластный груз 10 поднимается на высоту Н, т.е. на регуляторе запасется потенциальная энергия ,-H (6) где и - потенциальная энергия; масса балластного груза; Н - высота подъема балластного В то же время регулятор обладает ки нетической энергией, которая равна СИн.тах тсяхЛ), где Eц mdx кинетическая энергия регулятора на максимальной .орбите; си - угловая скорость; - момент количества движе ния, запасенный регулято ром на максимальной ор бите. Полная энергия, запасенная регуляторомF Е- и . - -КИИ.max Дальнейшее вращение машины 13 про исходит от центробежного регулятора через вторую коническую пару 11 за счет накопленной полной энергии Е. Стабилиза ция заданного параметра центробежного регулятора на энергетических уровнях сп сывается уравнением Радиус орбит инерционных масс 4-7 уменьшается, а балластный груз 1О опускается, производя работу при неизменной угловой скорости Со. Как только радиус орбит инерционны масс занимает минимальное значение да чик 14 минимальной орбиты включает двигатель 12 и происходит следующий цикл накачки энергией, центробежного регулятора, т.е. кинетическая энергия двияд щих сил двигателя переходит в кинети ческую и потенциальную энергию на регулятор в виде увеличения орбиты, занимаемой инерционными массами 4-7,. которые в свою очередь поднимают баллас ный груз 10, однако при этом обороты центробежного регулятора скоростр оста ются постоянными. Известно, что формулу кинетической нергии можно привести к виду )L-.mu,. ,(,0) де Б( - кинетическая энергия; - це Н тробежная . сила; 1 - текущее значение радиуса орбит, .е. кинетическую энергию в предлагаемом егуляторе определяет центробежная сила. Потенциальную же энергию регулятора пределяет ньютонова сила, равная гп де Ff - Ньютонова сила взаимного притяжения;it - масса балластного груза 10; m-j - масса земного шара; Н - расстояние между массой балластного груза и плоскостью земли. Выразив угловую скорость из (5) для текущего значения радиуса г u).-k. и сведя уравнения (З), (11) и (12) в систему получаем уравнение, описывающее алгоритм самостабилизации предлагаемого центробежного регулятора f uj mr-1ДЗ - г(VI . . ; 2.13 Стабилизация скорости заключается в следующем. Если момент количества движения Ц, запасенный на регулятбре, падает до какого-то значения L, ,за счет совершенной работы, то, согласно уравнению 3.13, заданная угловая скорость uj снижает-ся до значения моментально приводит к уменьшению центробежной силы f (см. 1.13), вследствие чего Ньютонова сила F) взаимного притяжения, воздействуя на коромысла 2, через шатуны 8 и вал 9, от действия балластного груза 10 начинает сводить инерционные массы 4, 5 И-6, 7, т.е. радиус орбиты уменьшается, что ,согпасно уравнению 3.13, означает увеличение угловой скорости до заданной uj. Таким образом, по мере убывания момента количества движения радиус орбит вращения инерционных масс соответственно убывает. Этот процесс дпится до тех пор, пока инерционные массы не займут минимальную орбиту радиуса г- после чего автоматически включается сипо- .вой привод и начинает происходить аналогичный процесс, только в обратном направлении по цепочке; увеличение момента количества движения приводит к увеличению угловой скорости, что приводит к увеличению центробежной силы, которая разводит инерционные массы увеличения радиус орбиты, а увегшчение радиуса приЬодит отклонившуюся угловую скорость к заданной.
Поскольку постоянная времени нарас- тания движущих сил выбрана намного боль. ше времени саморегулирования регулятора девиация угловой скорости заданного параметра стабилизации практически отсутствует,
На фиг, 4 представлены кривые графического решения уравнения (13), Кривая 18 отображает изменение центробежной силы F от радиуса орбиты г , кри- ая 19 - изменение Ньютоновой сипы от высоты подъема И балластного груза, кривая 2О есть результирующая этих двух сил. Потенциальная яма на кривой 20 несет известный в технике смысл, который заключается в том, что из установивщегося режима вьшести систему можно
лишь в том случае еспи на это затратить энергию, превосходящую накопленной самой системой.
Центробежный регулятор скорости является саморегулирующимся механическим узлом с собственной частотой вращения и обладает резонанснь1ми свойствами.
Формула изобретения
Центробежный .регулятор скорости, содержащий вал вращения, инерционные массы с коромыслами, о тл и ч а ющ и.йс я гем, что, с целью повышения точности регулирования, вал вращения выполнен в виде трубки с прорезями, в которых с возможностью перемещения расположены коромысла с инерционными мае- .сами, а коромысла установлены в средней части на штифт и соединены .подвижно шатунами с двумя плавающими оппозитными валами, на одном из которых установлен балластный груз.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 763861, кл, Q OSD 13/34, 1978,
2,Авторское свидетельство СССР по заяке № 2828472/18-24., кл,а050 13/1О, 18.10.79 (прототип )...
и
N
/
ир.
i
Xf
ce/7fi/
/
.--л
ч
/
--1
V.12
