1C
;о
Изобретение относится к судостроению, в частности к электрогидравлическим рулевым машинам.
Известна электрогидравлическая рулевая машина, содержаш.ая силовой исполнительный привод многокамерной конструкции, силовые установки с насосами переменной производительности и датчиками давления рабочей жидкости, соединенные гидравлическими линиями с камерами силового исполнительного привода, а также цистерны рабочей жидкости с датчиками уровня рабочей жидкости, пусковые блоки электродвигателей силовых установок, ш,иты питания, устройство разделения гидросистемы и систему управления с исполнительными механизмами и датчиком обратной связи, подключенным к румпелю 1.
Недостатком известной рулевой машины является пониженная надежность, обусловленная отсутствием устройства, исключающего частое срабатывание предохранительных клапанов силовых установок и силового исполнительного привода и возможные при этом случаи пикового заброса давления при работе на разделенной гидросистеме в режиме «следящего и «простого видов управлений.
Целью изобретения является повышение надежности рулевой машины.
Указанная цель достигается тем, что электрогидравлическая рулевая машина, содержащая силовой исполнительный привод многокамерной конструкции, силовые установки с насосами переменной производительности и датчиками давления рабочей жидкости, соединенные гидравлическими линиями с камерами силового исполнительного привода, а также цистерны рабочей жидкости с датчиками уровня рабочей жидкости, пусковые блоки электродвигателей силовых установок, щиты питания, устройство разделения гидросистемы, систему управления с исполнительными механизмами и датчиком обратной связи, подключенным к румпелю, снабжена связанным с румпелем блоком автоматического переключения и соединенным с ним дополнительным датчиком обратной связи, при этом основной датчик обратной связи соединен с румпелем через блок автоматического переключения, который электрически соединен с устройством разделения гидросистемы.
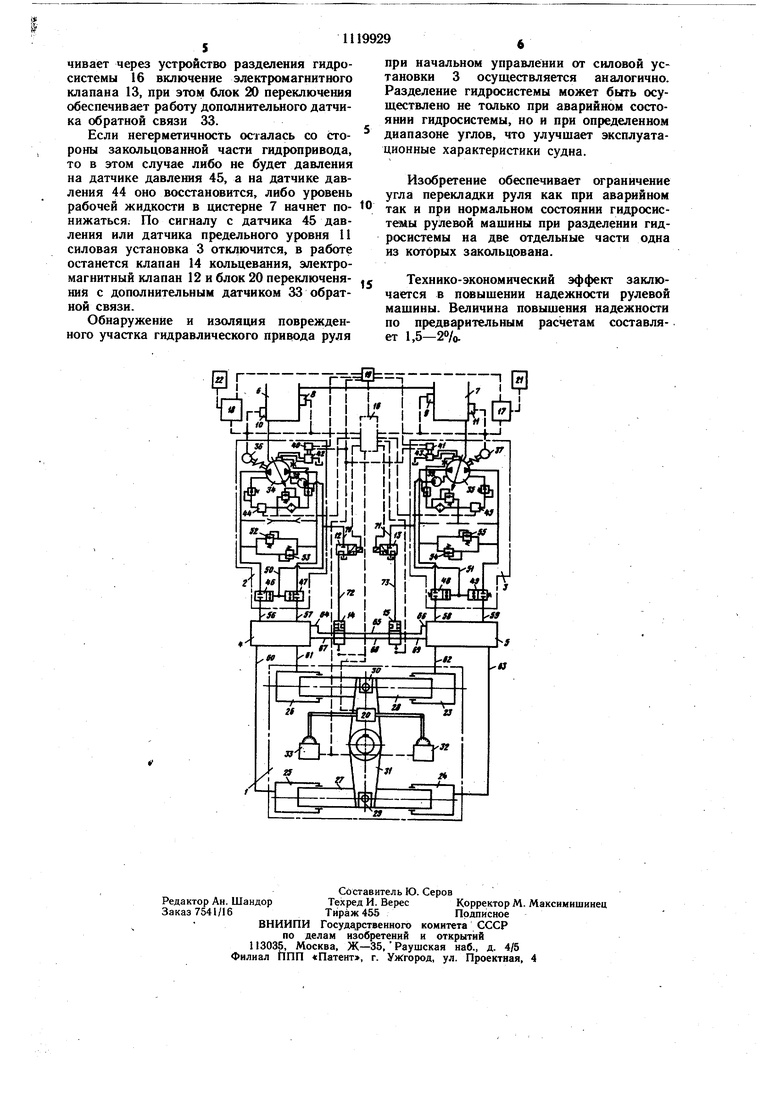
На чертеже показана принципиальная схема электрогидравлической рулевой машины.
Электрогидравлическая рулевая машина содержит силовой исполнительный привод 1, гидравлически соединенный с силовыми установками 2 и 3 через блоки запорно-предохранительных клапанов 4 и 5,при этом силовые установки соединены с цистернами 6
и 7, в которые помещены датчики 8 и 9 аварийного уровня и датчики 10 и И предельного уровня рабочей жидкости, электромагнитные клапаны 12 н 13,
гидравлически соединенные с клапанами 14 и 15 кольцевания и силовыми установками и электрически соединенные с устройством разделения гидросистемы 16 соединены с пусковыми блоками 17 и 18 электродвигателей силовых установок, системой 19 управления, блоком 20 переключения, щитами 21 н 22 питания.
Силовой исполнительный привод состоит из четырех цилиндровых камер 23-26, в которых размещены плунжеры 27 и 28,
соединенные через шарниры 29 н 30 с румпелем 31, а также датчиков обратной связи: основного 32 и дополнительного 33, соединенных с румпелем через блок 20 переключения.
Силовые установки 2 и 3 имеют собственные гидравлические контуры, которые состоят из насосов 34 и 35 переменной производительности, кинематически соединенных с электродвигателями 36 и 37, а также
со вспомогательыми насосами 38 и 39 управления и подпитки. Насосы переменной производительности соединены с исполнительными механизмами 40 и 41 системы управления через задатчики 42 и 43 перемещения люлек насосов.
В гидравлической линин подпитки вспомогательных насосов установлены датчики 44 и 45 давления, электрически соединенные с устройством разделения гидросистемы. Гидравлический выход от насосов переменной производительности силовых установок осуществляется через отсечные клапаны 46-49, полости управления которых соединены гидравлическими линиями 50 и 51 соответственно со вспомогательными насосами 38 и 39. Между гидравлическими линиями силовых установок установлены предохранительные клапаны 52-55. Силовые установки соединены с блоками запорно-, предохранительных клапанов гидравлическими линиями 56-59, а сами блоки соединены с камерами силового исполнительного
привода гидравлическими линиями 60-63, а между собой гидравлическими линиями 64-69.
Вспомогательные насосы 38 и 39 соединены с электромагнитными клапанами 12 и 13 гидравлическими линиями 70 и 71, при этом электромагнитные клапаны соединены с клапанами кольцевыми гидравлическими линиями 72 и 73.
Электрогндравлическая рулевая машина работает следующим образом.
При запуске, например, силовой установки 2 через пусковой блок 18 от щита 22 питания запускается электродвигатель 36
и получают питание датчики 8 и 9 уровня, система 19 управления, устройство разделения гидросистемы 16 и датчик 44 давления.
Силовой исполнительный привод 1 находится в среднем положении (в диаметральной плоскости судна), силовая установка 2 включена и работает на холостом режиме, при этом давлением от насоса 38 управления и подпитки по гидравлической линии 50 открыты отсечные клапаны 46 и 47.
При задании угла перекладки руля от системы 19 управления, например, на левый борт (по часовой стрелке) исполнительный механизм 40 воздействует на задатчик 42 перемещения люльки насоса 34, последняя, отклоняясь, обеспечивает подачу рабочей жидкости от насоса 34 через отсечной клапан 47 по гидравлическим линиям 57, 61, 64, 65, 66 и 63 через блоки запорно-предохранительных клапанов 4 и 5 и клапаны 14 и 15 кольцевания в цилиндровые камеры 24 и 26. Из цилиндрических камер 23 и 25 рабочая жидкость вытесняется по гидравлическим линиям 56, 60, 62, 67, 68 и 69 через блоки запорно-предохранительных клапанов 4 и 5 и клапаны 14 и 15 кольцевания 14, 15.
Давление рабочей жидкости воздействует на плунжеры 27 и 28, которые перемещаясь через шарниры 29 и 30 передаютусилие на румпель 31, заставляя его поворачиваться через шарниры 29 и 30, передают усилие на румпель 31, заставляя его поворачиваться по часовой стрелке, а вместе с ним и руль (не показан). При этом угол поворота руля фиксируется основным датчиком 32 обратной связи, соединенным с румпелем через блок 20 переключения и имеющим концевой электрический ограничитель, исключающий перекладку руля на угол свыше допустимой величины.
При задании угла перекладки на правый борт (против часовой стрелки) система 19 управления воздействует на исполнительный механизм 40, который через задатчик 42 перемещает люльку насоса 34 в другое положение, при этом нагнетательной становится гидравлическая линия 56, а всасывающей гидравлическая линия 57 силовой установки 2, под давлением оказываются рабочие камеры 23 и 25, а камеры 24 и 26 соединяются со всасывающими гидравлической линией 57. Руль перекладывается против часовой стрелки.
Работа силового исполнительного привода от силовой установки 3 аналогична работе от силовой установки 2.
В случае какого-либо повреждения гидравлических линий или камер силового исполнительного привода, гидравлический привод автоматически разделяется на две двухкамерные гидравлические системы.
При работе силовой установки 2 и по вреждении одной из гидравлический линий 56-69 или одной из камер 23-26 происхо дит понижение уровня в цистерне 6 и возможно падение давления на датчике 44 давления, установленном в гидравлической линии подпитки силовой установки 2. При срабатывании датчика уровня или датчика 44 давления поступает соответствующий сигнал в устройство разделения гидросистемы 16, которое подает команду на включение электромагнитного клапана 12, который, перемещаясь, соединяет через гидравлические линии 70 и 72 полость управления клапана 14 с насосом 38 управления и под5 питки. Клапан 14 кольцевания срабатывает, кольцуя камеры 23 и 24, при этом одновременно включается в работу силовая установка 3, которая начинает работать на закольцованные камеры. Цилиндровые камеры 25 и 26 остаются в работе. Одновре0менно с включением электромагнитного
клапана от устройства разделения гидросистемы 16 включаются блок 20 переключения, обеспечивающий переключение датчиков обратной связи: отключение из рабо5 ты основного датчика (отсоединение его от румпеля) и подключение в работу дополнительного датчика (соединение его с румпелем). Подключение осуществляется в диапазоне углов перекладки руля, на который настроен дополнительный датчик обратной
0 связи с целью исключения поломки его конечных выключателей, ограничивающих угол перекладки руля в соответствии с допустимой величиной давления в рабочих камерах при работе на разделенной гидросистеме.
Задание от системы управления с ходового мостика большего угла перекладки, чем величина, на которую настроен конечный выключатель датчика обратной связи
0 (дополнительного), окажется невозможным, что исключает необходимость работы предохранительных клапанов 52, 53 и силовой установки 2, а также предохранительных клапанов блоков 4 и 5.,.
Поиск неисправности в гидросистеме про5 должается в следующем порядке. Если уровень рабочей жидкости в цистерне 6 будет продолжать понижаться или же давление, регистрируемое датчиком давления 44 не восстановится, то следовательно потеря.
0 негерметичности произошла в гидросистеме привода, которая осталась незакольцованной и при отсутствии давления на датчике 44 силовой установки 2 и наличии давления на датчике давления 45 вновь включенной силовой установки 3 или же понижении уров5 ня в цистерне ё до датчика предельного уровня 10; подается команда на отключение силовой установки 2 и электромагнитного клапана 12, отключение которого обеспечивает через устройство разделения гидросистемы 16 включение электромагнитного клапана 13, при этом блок 20 переключения обеспечивает работу дополнительного датчика обратной связи 33.
Если негерметичность осталась со стороны закольцованной части гидропривода, то в этом случае либо не будет давления на датчике давления 45, а на датчике давления 44 оно восстановится, либо уровень рабочей жндкостн в цистерне 7 начнет понижаться; По сигналу с датчика 45 давлеиия или датчика предельного уровня 11 силовая установка 3 отключится, в работе останется клапан 14 кольцевання, электромагнитный клапан 12 и блок 20 переключеняниЯ с дополнительным датчиком 33 обратной связи.
Обиаружение и изоляция поврежденного участка гидравлического привода руля
Г7-гт- п-7
при начальном управлении от силовой установки 3 осуществляется аналогично. Разделение гидросистемы может быть осуществлено не только при аварийном состоянии гидросистемы, но и при определенном диапазоне углов, что улучщает эксплуатационные характеристики судна.
Изобретение обеспечивает ограничение угла перекладки руля как при аварийном так и при нормальном состоянии гидросистемы рулевой машины при разделении гидросистемы на две отдельные части одна из которых закольцована.
J5 Технико-экономический эффект заключается в повышении надежности рулевой машины. Величина повышения надежности
расчетам составляпо предварительным ет 1,5-2°/о.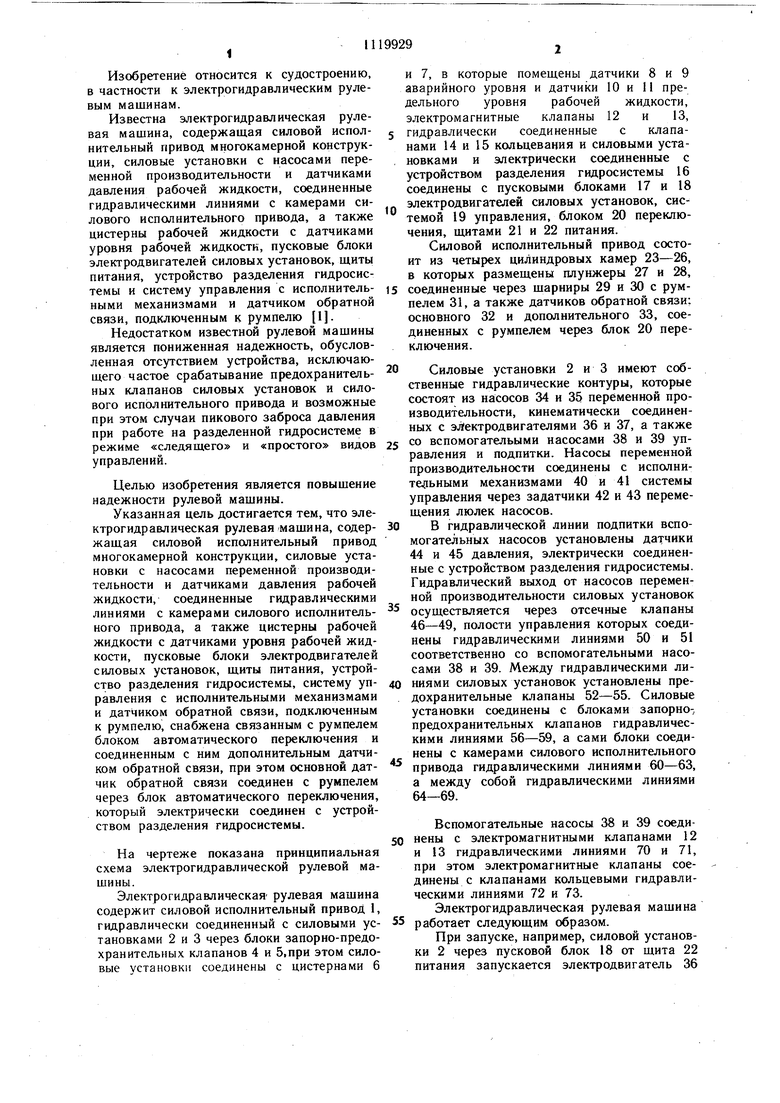

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая рулевая машина | 1983 |
|
SU1123939A1 |
| Электрогидравлическая рулевая машина | 1984 |
|
SU1181941A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1115967A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994340A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119928A1 |
| Электрогидравлическая рулевая машина | 1984 |
|
SU1207902A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1111943A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041418A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041417A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU1047779A1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА, содержащая силовой исполнительиый привод миогокамерной конструкции, силовые установки с насоса.ми переменной производительности и датчиками давления рабочей жидкости, соединенные гидравлическими линиями с камерами силового исполнительного привода. а также цистерны рабочей жидкости с датчиками уровня рабочей жидкости, пусковые блоки электродвигателей силовых установок, щиты питания, устройство разделения гидросистемы, систему управления с исполнительными механизмами и датчиком обратной связи, подключенным к румпелю, отличающаяся тем, что, с целью повышения надежности, она снабжена связанным с румпелем блоком автоматического переключення и соединенным с ним дополнительным датчиком обратной связи, при этом основной датчик обратной связи соединен с румпелем через блок автоматического переключения, который электрически соединен с устройством разделения гидросистемы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041417A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
