Изобретение относится к судостроению, в частности к электрогидравли- веским рулевым машинам.
Цель изобретения - повышение надежности рулевой машины.
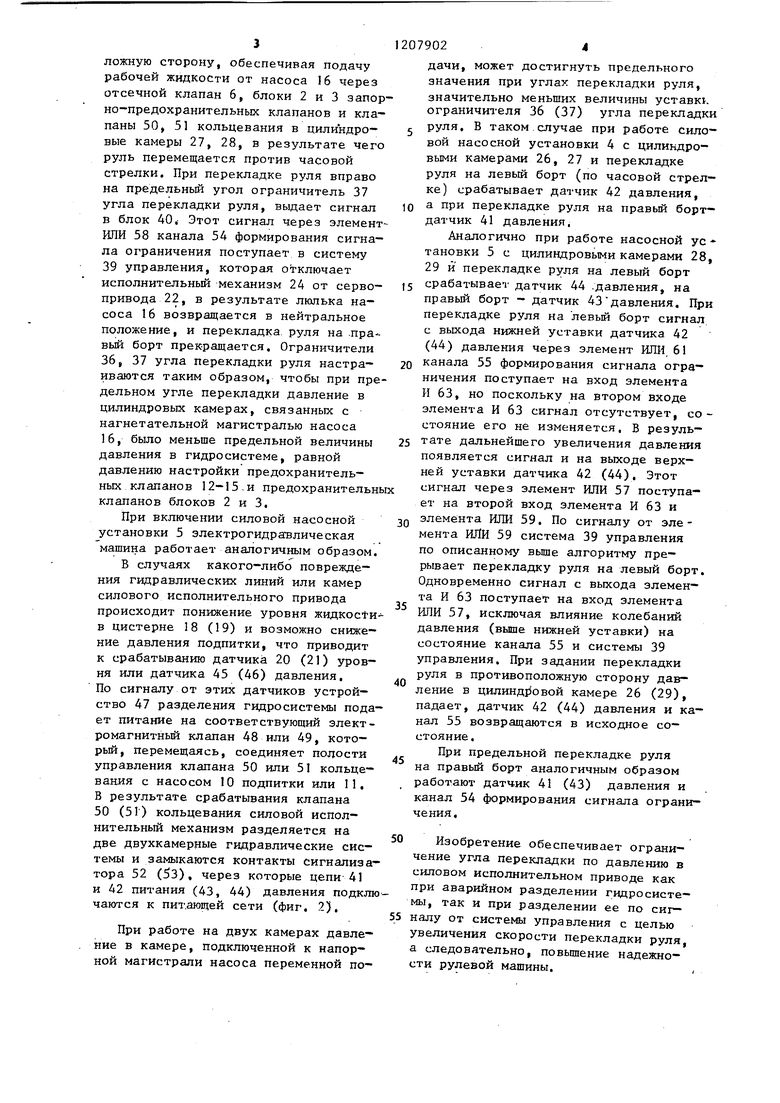
На фиг, 1 приведена принципиальная схема электрогидравлической рулевой машины; на фиг, 2 -г то же, блока ограничения угла перекладки руля.
Электрогидравлическая рулевая ма- шина содержит силовой исполнительньй привод 1, гидравлически сообщенный через блоки 2, 3 запорно-предохранительных клапанов с силовыми насосными установками 4 и 5, содержащими отсечные клапаны 6-9, гидравлически связанные с насосами 10 и 11 подпитки, предохранительными клапанами 12- 15 и насосами 16 и 17 переменной поДачи, Последние гидравлически связа- ны с цистернами 18, 19, снабженными датчиками 20 и 21 уровня жидкости, и кинематически связаны через сервоприводы 22 и 23 с исполнительными механизмами 24 и 25, .
Силовой исполнительньй привод 1 состоит из четырех цилиндровых камер 26-29, в которьк размещены плунжеры 30 и 31, соединенные через шарниры 32, 33 и румпель 34 с баллером 35 руля, который шарнирно соединен с ограничителями 36, 37 угла перекладки руля и датчиком 38 обратной связи, соединенным электрически с системой 39 управления, к которой под- ключены исполнительные механизмы 24, 25 и блок 40 ограничения угла перекладки руля, соединенный электрически с ограничителями 36, 37 угла перекладки руля и датчиками 41-44 давле- НИН рабочей жидкости. Датчики 20 и 21 уровня жидкости вместе с датчиками 45 и 46 давления подпитки подключены к устройству 47 разделения гидросистемы, к выходу которого подклю- чены электромагнитные клапаны 48 и 49, через которые насосы 10 и 11 подпитки гидравлически сообщены с клана нами 50 и 51 кольцевания, снабженным сигнализаторами 52 и 53 положения, через контакты которых цепи питания датчиков 41-44 подключены к питакг
щей сети (фиг, 2),
I
Блок 40 ограничения угла перекладки руля содержит два канала 54 и 55 (фиг, 2) формирования сигнала ограничения, состоящих из логических элеме тов ИЛИ 56-61 и элементов И 62,63,
Электрогидравлическая рулевая машина работает следующим образом.
При запуске силовой насосной установки, например.4, получают питание датчик 20 уровня жидкости, датчик 45 давления подпитки, система 39 управления, устройство 47 разделения гидросистемы, блок 40 ограничения угла перекладки руля и датчик 38 обратной связи с ограничите- лями 36, 37 угла перекладки руля.
Силовой исполнительный привод 1 находится в среднем положении (руль в диаметральной плоскости судна), насос 16 переменной подачи работает в режиме холостого хода, при этом давлением от насоса 1-0 подпитки открываются отсечные клапаны 6 и 7, При задании угла перекладки руля от системы 39 управления, например на ле- вьй борт (по часовой стрелке), ис- полнительньй механизм 24 отклоняет золотник сервопривода 22, который перемещает люльку насоса 16 переменной подачи, обеспечивающую подачу рабочей жидкости от насоса через отсечной клапан 7, блоки 2 и 3 запор но-предохранительных клапанов и клапаны 50 и 51 кольцевания в цилинд ровые камеры 26 и 29,
Давление рабочей жвдкости воздействует на плунжеры 30 и 31, которые, перемещаясь,. через шарниры 32 и.33 передают усилие на румпель 34 и баплер 35, заставляя их по вор ачиваться по часовой стрелке вместе с рулем (не показан). Угол отклонени руля от диаметральной плоскости судна -преобразуется .датчиком 38 обратной связи в электрический сигнал, который поступает в систему 39 управления, Цри перекладке руля на пре дельный угол (35) ограничитель 36 выдает сигнал в блок 40 ограничения угла перекладки. Этот сигнал через элемент ИЛИ 59 канала 55 формирования сигнала ограничения поступает в систему 39 управления, которая отключает исполнительньй механизм 24 от сервопривода 22, В результате люлька насоса 16 возвращается в нейтральное положение, и перекладка руля на левьй борт прекращается, При задании перекладки руля в противоположную сторону система управления снова подключает исполнительный механизм 24 и сервоприводы 22, люлька нассса 16 отклоняется в противоположную сторону, обеспечивая подачу рабочей жидкости от насоса 16 через отсечной клапан 6, блоки 2 и 3 запор но-предохранительных клапанов и клапаны 50, 51 кольцевания в цилиндровые камеры 27, 28, в результате чего руль перемещается против часовой стрелки. При перекладке руля вправо на предельный угол ограничитель 37 угла перекладки руля, выдает сигнал в блок 40. Этот сигнал через элемент ИПИ 58 канала 54 формирования сигнала ограничения поступает в систему 39 управления, которая отключает исполнительный механизм 24 от сервопривода 22, в результате люлька насоса 16 возвращается в нейтральное положение, и перекладка руля на .правый борт прекращается. Ограничители 36, 37 угла перекладки руля настраиваются таким образом, чтобы при предельном угле перекладки давление в цилиндровых камерах, связанных с нагнетательной магистралью насоса 16, было меньше предельной величины давления в гидросистеме, равной давлению настройки предохранительных клапанов 12-15 и предохранительн клапанов блоков 2 и 3.
При включении силовой насосной установки 5 электрогидравлическая машина работает аналогичным образом.
В случаях какого-либо повреждения гидравлических линий или камер силового исполнительного привода происходит понижение уровня жидкости в цистерне 18 (19) и возможно снижение давления подпитки, что приводит к срабатыванию датчика 20 (21) уровня или датчика 45 (46) давления. По сигналу от этих датчиков устройство 47 разделения гидросистемы подает питание на соответствующий элект- ромагнитньй клапан 48 или 49, который, перемещаясь, соединяет полости управления клапана 50 или 51 кольцевания с насосом 10 подпитки или П. В результате срабатывания клапана 50 (51) кольцевания силовой исполнительный механизм разделяется на две двухкамерные гидравлические системы и замыкаются контакты сигнализатора 52 (53), через которые цепи-41 и 42 питания (43, 44) давления подклчаются к пит.ающей сети (фиг. 2).
При работе на двух камерах давление в камере, подключенной к напорной магистрали насоса переменной по
дачи, может достигнуть предельного значения при углах перекладки руля, значительно меньших величины уставкк ограничителя 36 (37) угла перекладки руля. В таком случае при работе силовой насосной установки 4 с цилиндровыми камерами 26, 27 и перекладке руля на левый борт (по часовой стрелке) срабатывает датчик 42 давления, а при перекладке руля на правый борт- датчик 41 давления,
Аналогично при работе насосной ус тановки 5 с цилиндровыми камерами 28, 29 и перекладке руля на левый борт срабатывает датчик 44 .давления, на правый борт - датчик 43 давления. При перекладке руля на левьй борт сигнал с выхода нижней уставки датчика 42 (44) давления через элемент ИЛИ 61 канала 55 формирования сигнала ограничения поступает на вход элемента И 63, но поскольку на втором входе элемента И 63 сигнал отсутствует, состояние его не изменяется. В результате дальнейшего увеличения давления появляется сигнал и на выходе верхней уставки датчика 42 (44). Этот сигнал через элемент ИЛИ 57 поступает на второй вход элемента И 63 и элемента ИЛИ 59. По сигналу от элемента ИЛИ 59 система 39 управления по описанному выше алгоритму прерывает перекладку руля на левый борт. Одновременно сигнал с выхода элемента И 63 поступает на вход элемента ИЛИ 57, исключая влияние колебаний давления (выше нижней уставки) на состояние канала 55 и системы 39 управления. При задании перекладки руля в противоположную сторону давление в цилинд15овой камере 26 (29), падает, датчик 42 (44) давления и канал 55 возвращаются в исходное состояние .
При предельной перекладке руля на правьй борт аналогичным образом работают датчик 41 (43) давления и канал 54 формирования сигнала ограничения.
Изобретение обеспечивает ограничение угла перекладки по давлению в силовом исполнительном приводе как при аварийном разделении гидросистемы, так и при разделении ее по сиг- налу от системы управления с целью увеличения скорости перекладки руля, а следовательно, повьш1ение надежности рулевой машины./
18
(PU8. 1
М.
Верхняя , уставка
нити.
Сустав.
т
Питание
Питание
Верхняя , астабка
нижняя .. иставка
Питание
Питание
верхняя , устаош
нижняя а истабка
Питание.
Латание
верхняя устлавка
Иижтя . истабка
Питание
Питание -
56 S/f 62
К блоку
39
К клатнд 50 -52
Хблоку
37
Сеть.
к блонд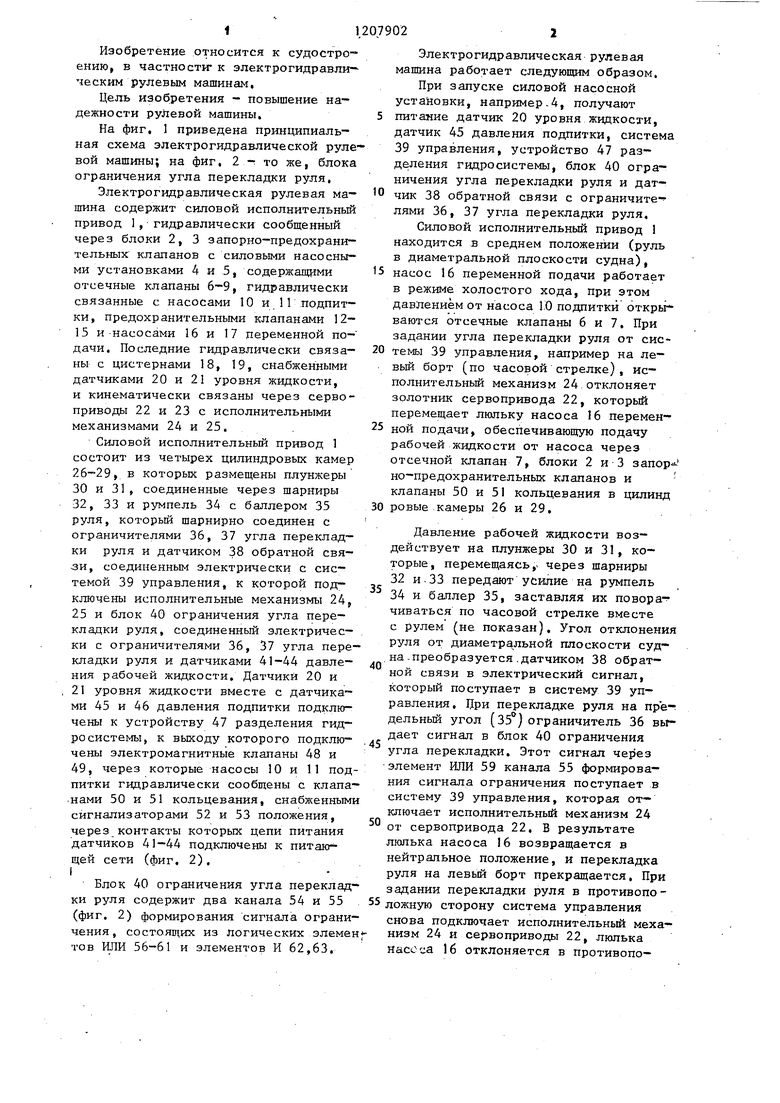
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119929A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1123939A1 |
| Электрогидравлическая рулевая машина | 1984 |
|
SU1181941A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1115967A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119928A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994340A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041418A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1111943A1 |
| Электрогидравлическая рулевая машина | 1982 |
|
SU1041417A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU1047779A1 |



Редактор М.Келемеш
Составитель В.Огарков
Техред Л.Микеш Корректор В.Синицкаяг
Заказ 156/25Тираж 422 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г, Ужгород, ул. Проектная, 4
