Изобретение относится к области машиностроения, в частности к. конструкциям манипуляторов и промьшигенных роботов.
Известен промьшшенный робот, содержащий основание, приводы и руку с исполнительным органом, связанную двумя шарнирами со звеньями механизмов ее перемещения, одно из которых представляет собой кривошип сателлита основного планетарного механизма.
Недостатком известного промьпиленного робота является то, что для фиксации руки в заданном положении необходим пантографный механизм, применение которого ограничивает зону обслуживания и увеличивает габари1 Эты промьшшенного робота„
о
Цель изобретения - расишрение
СП зоны обслуживания и уменьшение га00баритов промьшшенного робота.
о:
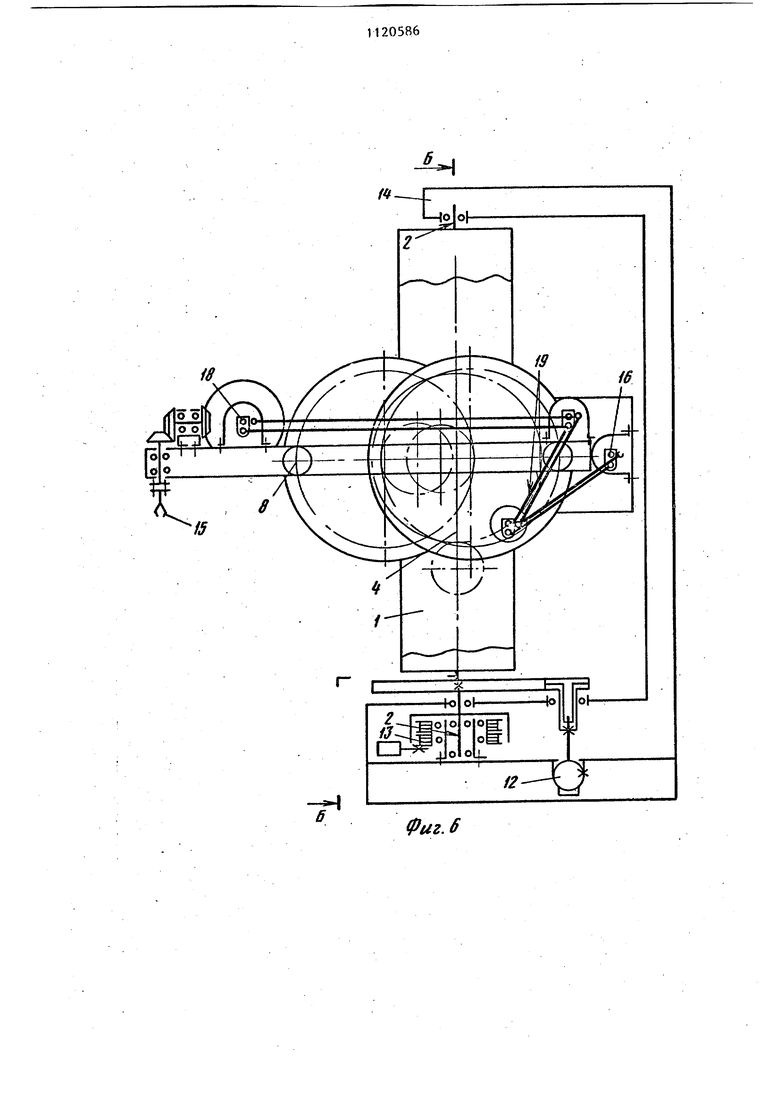
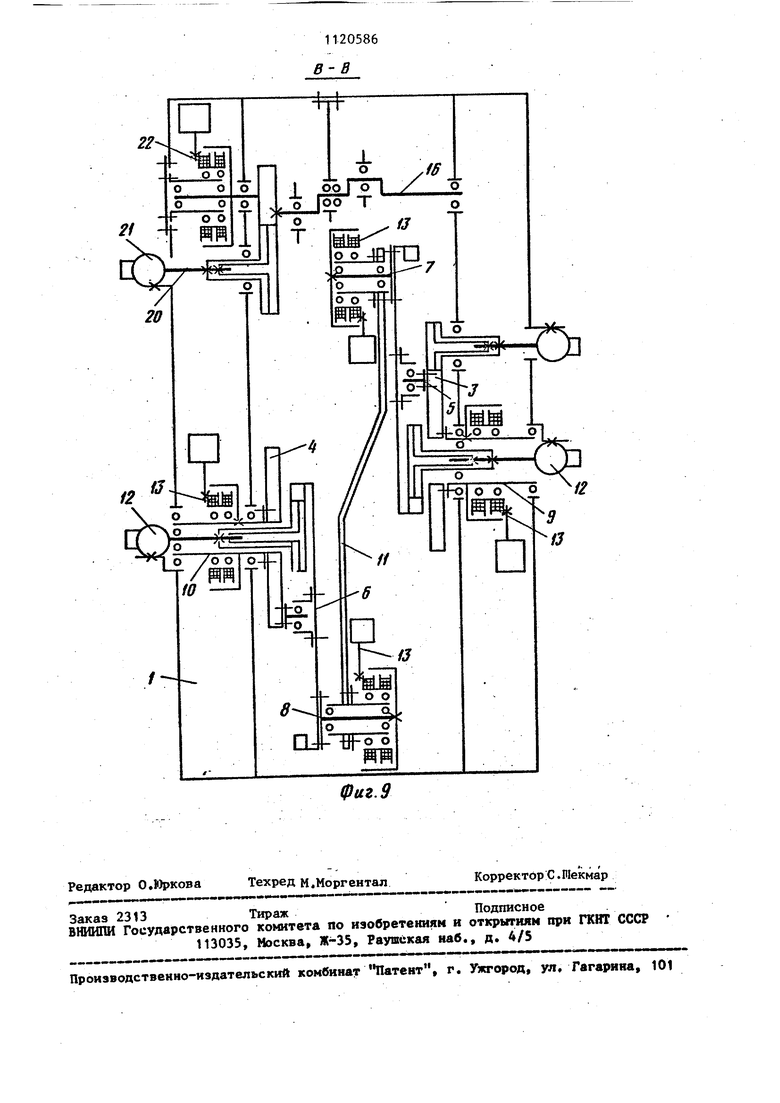
Цель достигается двумя вариантами Согласно первому варианту в известном 1тромьши енном роботе, содержащем основание, приводы и руку с исполнительным органом, связанную двумя шарнирами со звеньями механизмов ее перемещения, одно из которых представляет собой кривошип сателлита основного планетарного механизма, последний снабжен вторым сателшитом с кривоиотом, а рука шарнирно связана с кривошипами этих сателлитов. Согласно второму варианту известный промышленный робот, содержащий основание, приводы и руку с исполнительным органом, связанную двумя шарнирами со звеньями механизмов ее перемещения, одно из которых предста ляет собой кривошип сателлита основного планетарного механизма, снабжен вторым планетарным механизмом, а сателлит этого механизма - кривошипом, при этом рука шарнирно связана с кривошипами сателлитов этих планетарных механизмов. На фиг, 1 показана кинематическая схема планетарного механизма с одним водилом и двумя сателлитами; на фиг. 2 - вид сверху на фиг, 1; на фиг, 3 показана кинематическая схема двух планетарных механизмов; на фиш, 4 - вид сверху на фиг, 3; на фиг, 5 - кинематическая схема промьшшенного робота, выполненного по первому варианту на фиг, 6 - кинематическая схема промьшшенного робота, выполненного по второму варианту; на фиг, 7 - разрез А-А на фиг.5 на фиг, 8 - разрез по Б-Б на фиг. 6 на фиг, 9 - разрез по В-В на фиг,8. Промьшшенный робот согласно первому варианту состоит из рамного корпуса 1, имеющего возможность вращаться вокруг оси 2, на котором смонтирован планетарный механизм с одним водилом, выполненным в виде дисков 3 и 4 и двух сателлитов 5 и Кривошипы оси 7 и 8 эксцентрично укреплены на вращающихся осях сателли тов 5 и 6 на радиусе г. Оси сателли тов 5 и б смонтированы в подшипниках на водиле. Водило укреплено на оси 10, а последняя через подшипники ук реплена в рамном корпусе 1. Исполни тельньй орган - рука 11 в виде плос кого стержня через подшипники насажена на кривошипы 7 и 8 и может перемещаться с ними. Оси 2, 7, 8, 9 и 10 снабжены индивидуальными приво дами 12 и преобразователями 13 для опредепения углового поворота осей 2, 7, 8, 9 и 10, Приводами 12 здесь с;гужат регу:шруемые двигатели посто янного тока типа ДК-1 или ДП, либо шаговые двигатели, которые через одну пару шестерен вращают соответственно оси 2, 7, 8, 9 и 10, Ось 2 рамного корпуса 1 через подшипники укреш(ена в неподвижной станине 14, На левом конце руки 11 установлен механический захват 15, движение которому сообщается через коленчатые оси 16, 17, 18, 19, тяги 20 от привода Я.1. Ось 16 снабжена круговым преобразователем 22, который здесь выполянет функции обратной связи. Конструктивное отличие промьшшенного робота согласно второму варианту состоит в том, что в нем два разделштельных водила 3 и 4, каждое из которых может независимо вращаться вокруг своей оси 9 и 10, в то время как в первом варианте водило одно. Поскольку размеры дисков 3 и 4 ограничены, расстояние между кривошипами 7 и 8 меньше, чем во втором варианте, где крепление исполнительного органа - руки 11 - является более жестким из-за возможности увеличить расстояние между кривошипами 7 и 8, соответствующими самостоятельным водилам 3 и 4« Тем самым повышается грузоподъемность руки 11, Функциональное отличие промышлен ного робота согласно второму варианту от первого варианта состоит в увеличении зоны сервиса промьшишнного робота. Промьшшенный робот согласно первому и второму вариантам работает cxteдующим образом. Во время установления левого конца исполнительного органаруки 11 в заданную точку приводы 12 вращают оси 2, 7, 8, 9и 10 по соответствующим величинам углового поворота, преобразованным по введенным координатам заданной точки.После отработки заданных углов поворотов осей 2, 7, 8, 9и 10 по данным пре- . образователей 13, привода 12 путем торможения останавливают вращения осей.2,, 7, 8, 9 и 10 в нужном положении. В случае еобходимости получить заданную .траекторию перемещения ру-. ки 11 промьшшенного робота скорость вращения осей 2, 7, 8, 9и10 программируется, а регулирование во время отработки осуществляется по час тоте информации, получаемой от преобразователей 13, которые выполняют функции обратной связи. Движение захвата 15 для зажима и разжима предметов, а также ориентирование предметон в пространстве осуществляется аналогично, как в прототипе, от привода 21, смонтированного на рамном корпусе 1 поворотом осей 16, .17, 5 19 на нужную величину, контроль осуществляет круговой преобразователь 22. Применение предложенного устройства по первому и второму варианту позволит исключить необходимость использования для ориентирования и фик сации руки специального механизма, что уменьшает габариты конструкции
фаг.1 6 промьшшенного робота, а также увеличить зону обслуживания, Промьшшенный робот, выполненный по второму варианту, конструктивно отличается большими габаритами и массой, но крепление руки является более жестким, а грузоподъемность повьшгается« Фиг, 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1985 |
|
SU1310198A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Промышленный робот | 1978 |
|
SU847617A1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| Двухканальный фрикционный исполнительный механизм электромеханического привода | 2024 |
|
RU2830019C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |



1. ПРОМЬШШЕННЫЙ РОБОТ (ЕГО ВАРИАНТЫ), содержащий основание, приводы и руку с исполнительным орj-aHoM, связанную двумя шарнирами со звеньями механизмов ее перемещения, одно из которых представляет собой кривошип сателлита основного тшанетарного механизма, о и ч а ющ и и с я тем, что, с целью расширения зоны обслуживания и з еньшения габаритов, гоханетарный механизм снабжен вторым сателлитом с кривошипом, а рука шарнирно связана с кривошипами этих сателлитов о 2. Промышленный робот, содержащий основание, приводы и руку с исполнительным органом, связанную двумя шарнирами со звеньями механизмов ее перемещения, одно из которых представляет собой кривошип сателлита основного шсанетарного механизм ;, отличающийся тем, что, с целью расширения зоны обслуживания и уменьшения габаритов, он снабжен дополнительным планетарным механизмом, а сателлит этого механизма кривошипом, при этом рука шарнирно связана с кривошипами сателлитов этих планетарных механизмов.
,v
-нГ
ff
/
1Ь
фиг л
Фиг. 6
М
оХо
UJ
о о о
/
/J//7-ld
1Г
Ш.7
13
Ut
12
-L.
-Г
Ь
в
т
X
Фиг. 8
фиг.В
| Промышленный робот | 1978 |
|
SU847617A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
