Изобретение относится к технологическому оборудованию для сборки пластинчатых магнитопроводов трансформаторов и может быть использовано в электротехнической промьшшенности в качестве устройства, предназначенного для захвата пластин из кассет, переноса и укладки их на направляющие элементы сборочного оборудования.
Цель изобретения - расширение технологических возможностей.
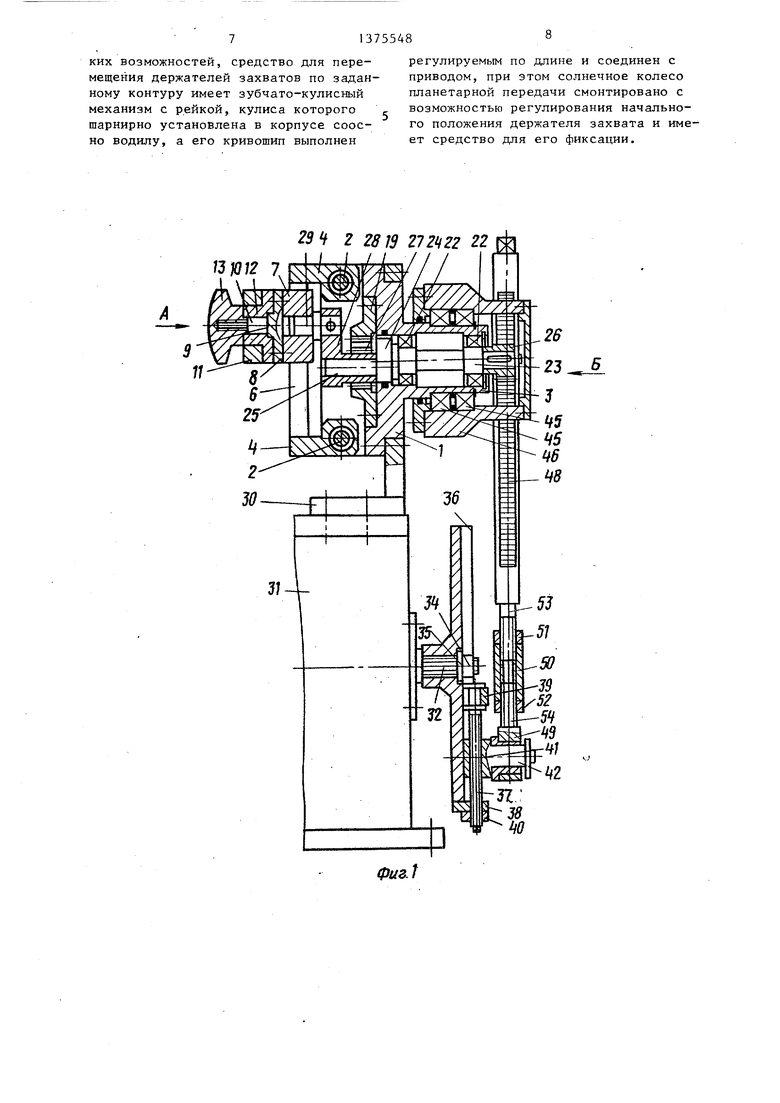
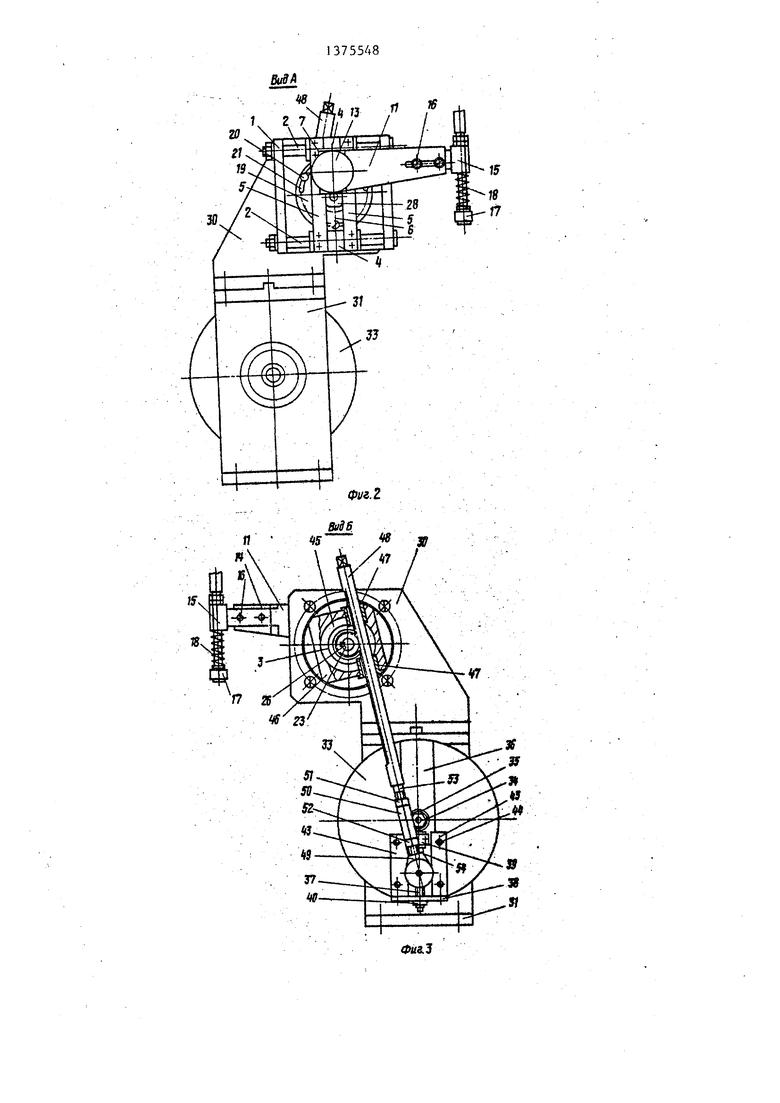
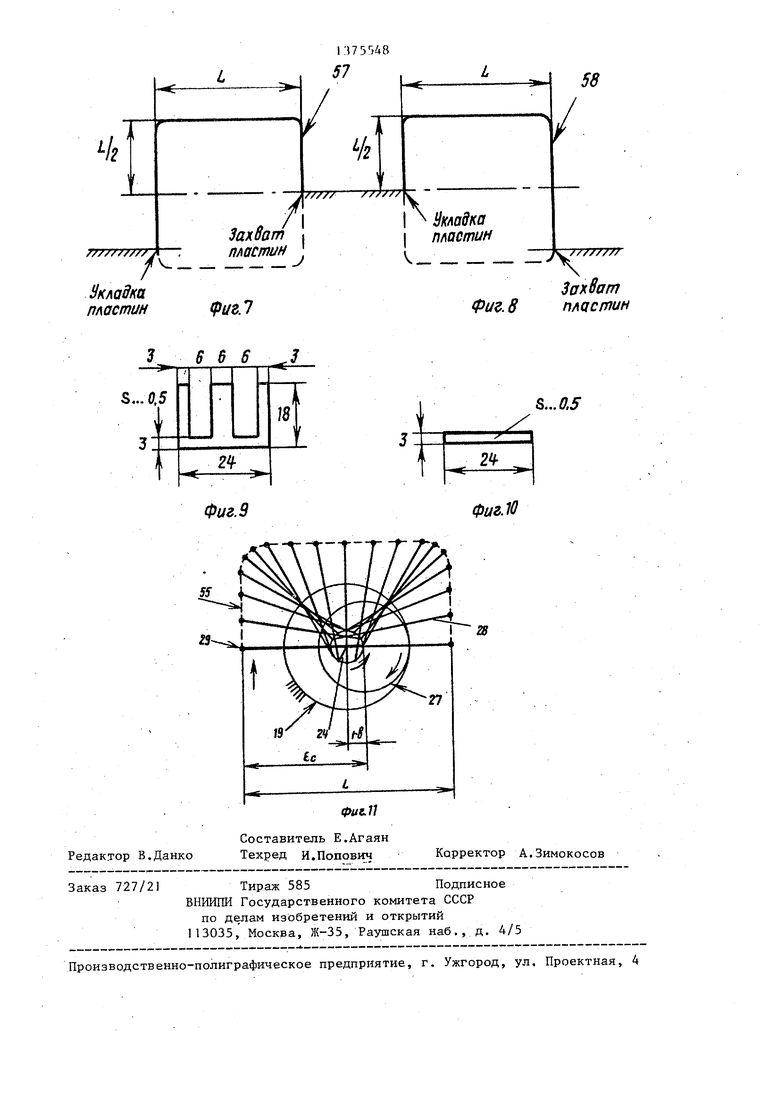
На фиг.1 изображен укладчик пластин, разрез; на фиг,2 - вид А на фиг.1; на фиг.3 - вид Б на фиг.1; на фиг.4 - исполнительный механизм укладчика пластин; на фиг.5-8 - траектория движения исполнительного звена укладчика при различных регулировках исполнительного механизма и его при- вода; на фиг.9 - Ш-образная пластина магнитопровода; на фиг.10 - замыкающая пластина магнитопровода, на захвате, переносе и укладке которой использован предлагаемый укладчик плас- тин; на фиг.П - траектория перемещения эксцентрикового пальца сателлита соответствующая 1,5 оборотам водила.
Укладчик пластин (фиг.1-4) содержит корпус 1, снабженный двумя непод- вижными взаимно параллельными направляющими 2 и трубчатой осью 3, жестко соединенной с корпусом 1 (или выполненной совместно с ним). На направляющих 2 установлена подвижная кули- са 4, снабженная двумя направляющими планками 5, между которыми образован паз 6. Подвижная кулиса 4 может перемещаться вдоль направляющих 2. Между направляющими планками 5 в пазу 6 ус- тановлен ползун 7, который может перемещаться вдоль паза 6. На ползуне 7 закреплена ось 8, снабженная направляющим шлицом 9 и цилиндрическим хвостовиком 10 с резьбой на конце.
На цилиндрический хвостовик 10 установлен держатель 11, снабженный жестко связанной с ним втулкой 12 с пазом, охватывающим направляющий щлиц 9. От осевого перемещения дер- жатель 11 зафиксирован гайкой 13, навернутой на резьбовой конец цилиндрического хвостовика 10. В пазу 14 держателя 11 установлена головка захвата 1 5 и закреплена винтами 16. В нап равляющих головки захвата 15 установлены, например, вакуумные присоски 17 - одна для захвата Ш-образной пластины магнитопровода, другая для
захвата замыкающей пластины магнитопровода (на фиг.2 и 3 показана одна присоска). Вакуумные присоски 1 7 подпружинены вдоль своих осей пружинами 18.
В корпусе 1 соосно с трубчатой осью 3 установлено солнечное колесо 19 с возможностью поворота вокруг своей оси и последующей фиксации его винтами 20. Солнечное колесо 19 снабжено пазами 21. Внутри трубчатой оси 3 на подшипниках 22 качения установлено водило 23, снабженное кривощи- пом ,24 и пальцем 25. На водиле 23 закреплено зубчатое колесо 26, а на пальце 25 свободно установлен сателлит 27 с жестко связанным с ним кривошипом 28, снабженным пальцем 29. Сателлит 27 входит во внутреннее зацепление с солнечным колесом 19, а кривошип 28 посредством пальца 29 шарнирно соединен с ползуном 7. Корпус 1 с помощью стойки 30 закреплен на корпусе 31 привода сборочного станка. На выходном конце вала 32 привода сборочного станка закреплен кривощип 33, зафиксированный от осе- вог) перемещения гайкой 34 с шайбой 35. Кривошип 33 снабжен диаметральным пазом 36, в котором радиально установлен винт 37 с помощью планки 38 и колодки 39. От осевого перемещения винт 37 удерживается колодкой 39, а от поворота вокруг своей оси фиксируется гайкой 40. На винте 37 установлен ползунок 41, снабженный кривошипным пальцем 42. Ползунок 41 своими боковыми гранями опирается на направляющие стенки диаметрального паза 36 и на планки 43, закрепленные на кривошипе 33 вдоль диаметрального паза 36, с помощью винтов 44.
На трубчатой оси 3 на подшипниках
45качения установлена соосно с во- дилом 23 качающаяся кулиса 46, снабженная направляющими 47 (например, втулками), в которых установлена зубчатая рейка 48, снабженная шарнирной головкой 49, стяжной муфтой 50 и гайками 51 и 52. Зубчатая рейка 48 имеет возможность перемещаться возврат-- но-поступательно вдоль своей оси и качаться вместе с качающейся кулисой
46вокруг ее оси. Внутри стяжной муфты 50 на ее концах вьтолнены резьбы противоположного направления (левая и правая). На цилиндрическом хвостовике 53 зубчатой рейки 48 и на ци линдрическом хвостовике 54 шарнирной головки 49 резьбы выполнены также противоположного направления. То же касается и гаек 51 и 52. Зубчатая рейка 48 входит в зацепление с зубчатым колесом 26 и шарнирно связана посредством шарнирной головки 49 с кривошипным пальцем 42.
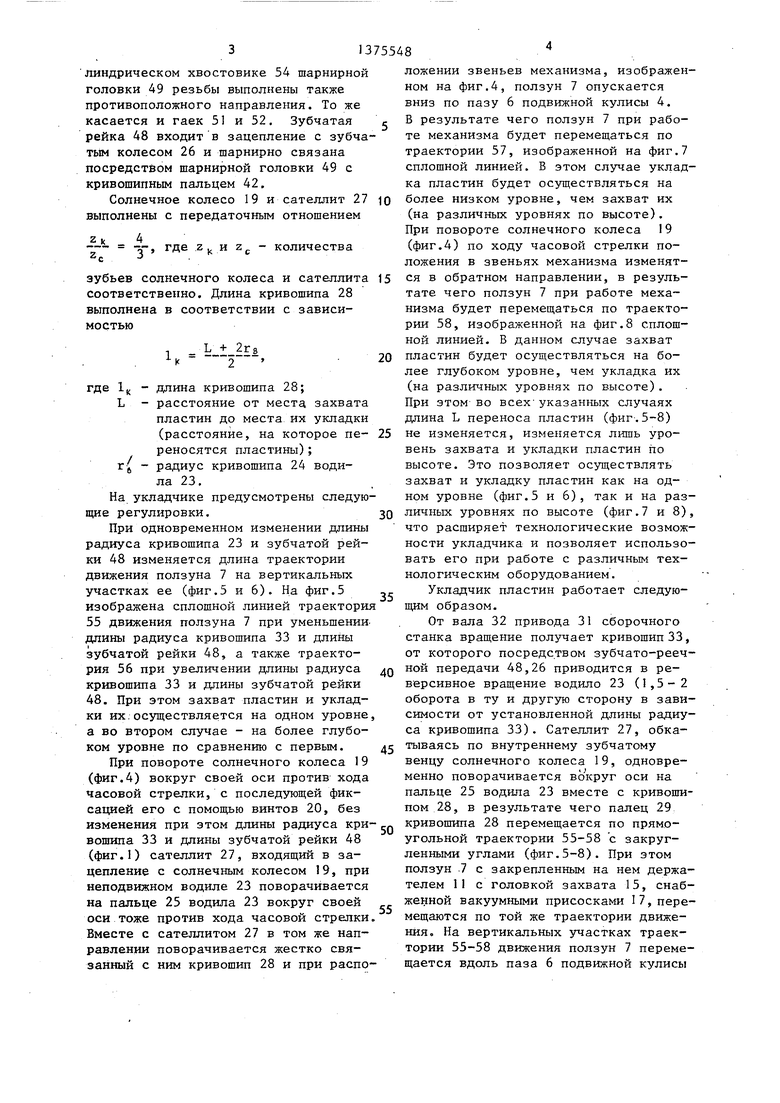
Солнечное колесо 19 и сателлит 27 выполнены с передаточным отношением
где Z и Z р - количества с -
зубьев солнечного колеса и сателлита соответственно. Длина кривошипа 28 выполнена в соответствии с зависимостью
Ч
2
L г{
где 1 - длина кривошипа 28;
расстояние от места захвата пластин до места их укладки (расстояние, на которое пе- реносятся пластины); радиус кривошипа 24 водила 23,
На укладчике предусмотрены следующие регулировки.
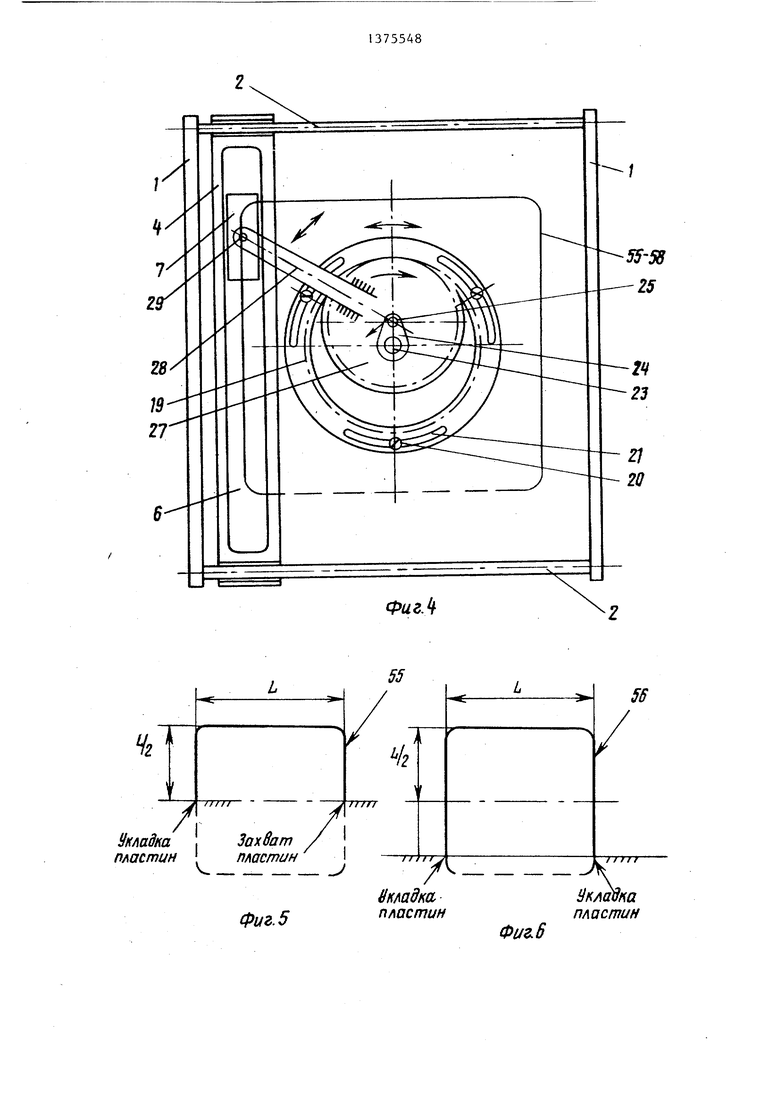
При одновременном изменении длины радиуса кривошипа 23 и зубчатой рейки 48 изменяется длина траектории движения ползуна 7 на вертикальных участках ее (фиг.5 и 6). На фиг.5 изображена сплошной линией траектори 55 движения ползуна 7 при уменьшении длины радиуса кривошипа 33 и длины зубчатой рейки 48, а также траектория 56 при увеличении длины радиуса кривошипа 33 и длины зубчатой рейки 48. При этом захват пластин и укладки их.осуществляется на одном уровне а во втором случае - на более глубоком уровне по сравнению с первым.
При повороте солнечного колеса 19 (фиг.4) вокруг своей оси против хода часовой стрелки, с последуюш;ей фиксацией его с помощью винтов 20, без изменения при этом длины радиуса кривошипа 33 и длины зубчатой рейки 48 (фиг.1) сателлит 27, входяший в зацепление с солнечным колесом 19, при неподвижном водиле 23 поворачивается на пальце 25 водила 23 вокруг своей оси тоже против хода часовой стрелки Вместе с сателлитом 27 в том же направлении поворачивается жестко связанный с ним кривошип 28 и при распо
5
0
5
5
0
0
5
0
5
ложении звеньев механизма, изображенном на фиг.4, ползун 7 опускается вниз по пазу 6 подвижной кулисы 4. В результате чего ползун 7 при работе механизма будет перемещаться по траектории 57, изображенной на фиг.7 сплошной линией. В этом случае укладка пластин будет осуществляться на более низком уровне, чем захват их (на различных уровнях по высоте). При повороте солнечного колеса 19 (фиг.4) по ходу часовой стрелки положения в звеньях механизма изменятся в обратном направлении, в результате чего ползун 7 при работе механизма будет перемещаться по траектории 58, изображенной на фиг.8 сплошной линией. В данном случае захват пластин будет осуществляться на более глубоком уровне, чем укладка их (на различных уровнях по высоте). При этом во всех-указанных случаях длина L переноса пластин (фиг.5-8) не изменяется, изменяется лшпь уровень захвата и укладки пластин по высоте. Это позволяет осуществлять захват и укладку пластин как на одном уровне (фиг.5 и 6), так и на различных уровнях по высоте (фиг.7 и 8), что расширяет технологические возможности укладчика и позволяет использовать его при работе с различным технологическим оборудованием.
Укладчик пластин работает следующим образом.
От вала 32 привода 31 сборочного станка вращение получает кривошип 33, от которого посредством зубчато-реечной передачи 48,26 приводится в реверсивное вращение водило 23 (1,5-2 оборота в ту и другую сторону в зависимости от установленной длины радиуса кривошипа 33). Сателлит 27, обкатываясь по внутреннему зубчатому венцу солнечного колеса 19, одновременно поворачивается вокруг оси на пальце 25 водила 23 вместе с кривошипом 28, в результате чего палец 29 кривошипа 28 перемещается по прямоугольной траектории 55-58 с закругленными углами (фиг.5-8). При этом ползун .7 с закрепленным на нем держателем 11 с головкой захвата 15, снабженной вакуумными присосками I 7, перемещаются по той же траектории движения. На вертикальных участках траектории 55-58 движения ползун 7 перемещается вдоль паза 6 подвижной кулисы
513
4, кулиса при этом неподвижна. На горизонтальном участке траектории 55- 58 движения подвижная кулиса 4 перемещается вдоль направляющих 2, ползун 7 перемещается вместе с подвижной кулисой 4, а относительно паза 6 подвижной кулисы 4 не перемещается. При переходе ползуна 7 на правый вертикальный участок траектории 55-58 автоматически, включается вакуум, вакуумные присоски 17 опускаются по вертикальной прямой в. кассету (не показана) и захватывают из ее отсеков одну Ш-образную пластину (фиг.9) и од- ну замыкающую пластину (фиг.10) маг- нитопровода.
При обратном движении вакуумных присосок 17 захваченные пластины выносятся из кассеты по вертикальной прямой вверх, затем переносятся на позицию укладки по горизонтальному участку траектории 55-58. Над позицией укладки вакуумные присоски 17 опускаются по левому вертикальному участку траектории 55-58 вниз и укладывают пластины на направляющие элементы сборочного стайка (не показаны) . В это время автоматически отключается вакуум, вакуумные присоски 17 поднимаются по вертикальной прямой вверх и перемещаются по траектории 55-58 в обратном направлении для захвата следующей пары пластин из отсеков кассеты. Далее цикл работы повторяется.
Таким образом, размещение ведомого звена исполнительного механизма (подвижной кулисы) на неподвижных направляющих скалках в укладчике пластин обеспечивает направленное перемещение подвижной кулисы и исключает его смещения в плоскости, перпендикулярной его траектории движения, что обеспечивает надежность в работе.
Выполнение исполнительного механизма укладчика в виде зубчато-кулисного планетарного механизма с длительными остановками ведомого звена (подвижной кулисы) и использование в нем.ползуна, установленного в пазу подвижной кулисы в качестве исполнительного звена, на котором закреплен держатель с установленной на нем головкой захвата пластиц, обеспечивает прямолинейное вертикальное перемещение головки захвата пластин над позициями захвата пластин и укладки их.
0
5
5
0
5
0
5
0
5
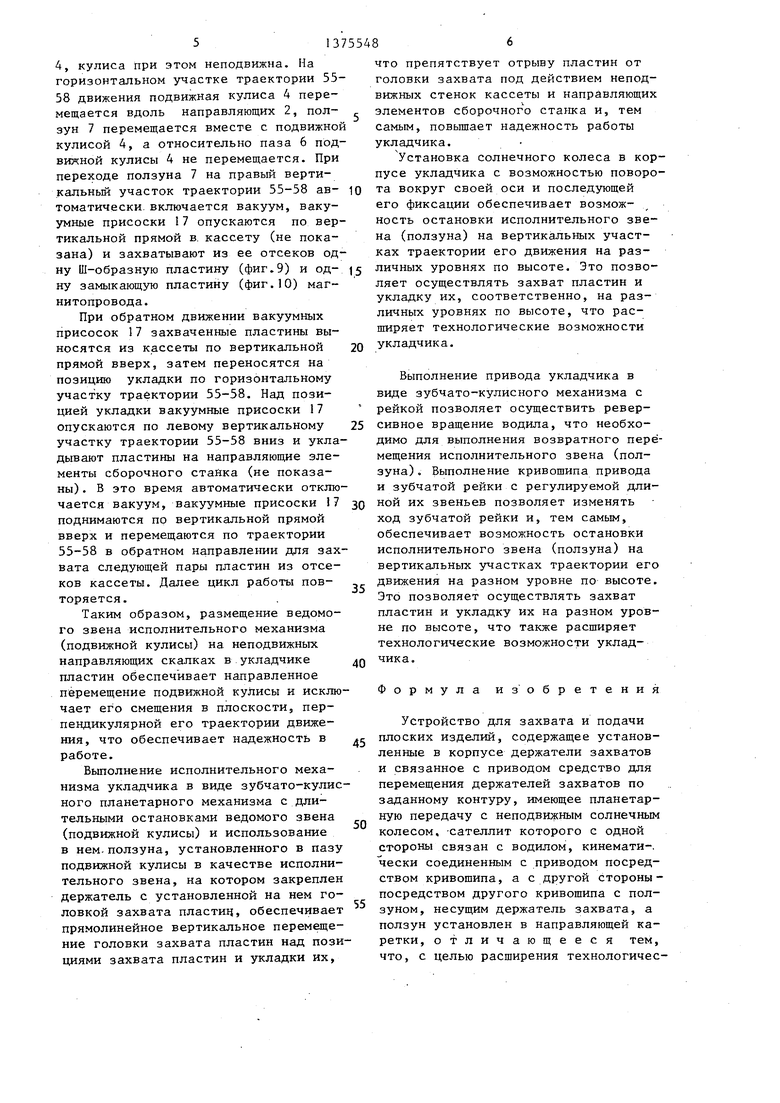
что препятствует отрыву пластин от головки захвата под действием неподвижных стенок кассеты и направляющих элементов сборочного станка и, тем самым, повьшает надежность работы укладчика.
Установка солнечного колеса в корпусе укладчика с возможностью поворота вокруг своей оси и последующей его фиксации обеспечивает возможность остановки исполнительного звена (ползуна) на вертикальных участках траектории его движения на различных уровнях по высоте. Это позволяет осуществлять захват пластин и укладку их, соответственно, на различных уровнях по высоте, что рас- щиряет технологические возможности укладчика.
Выполнение привода укладчика в виде зубчато-кулисного механизма с рейкой позволяет осуществить реверсивное вращение водила, что необходимо для выполнения возвратного перемещения исполнительного звена (ползуна) . Выполнение кривошипа привода и зубчатой рейки с регулируемой длиной их звеньев позволяет изменять ход зубчатой рейки и, тем самым, обеспечивает возможность остановки исполнительного звена (ползуна) на вертикальных участках траектории его движения на разном уровне по высоте. Это позволяет осуществлять захват пластин и укладку их на разном уровне по высоте, что также расширяет технологические возможности укладчика.
Формула изобретения
Устройство для захвата и подачи плоских изделий, содержащее установленные в корпусе держатели захватов и связанное с приводом средство для перемещения держателей захватов по заданному контуру, имеющее планетарную передачу с неподвижным солнечным колесом, -сателлит которого с одной стороны связан с водилом, кинемати-. чески соединенным с приводом посредством кривощипа, а с другой стороны- посредством другого кривошипа с ползуном, несущим держатель захвата, а ползун установлен в направляющей каретки, отличающееся тем, что, с целью расширения технологических возможностей, средство для перемещения держателей захватов по заданному контуру имеет зубчато-кулисный механизм с рейкой, кулиса которого шарнирно установлена в корпусе соос- но водилу, а его кривошип выполнен
регулируемым по длине и соединен с приводом, при этом солнечное колесо планетарной передачи смонтировано с возможностью регулирования начального положения держателя захвата и имеет средство для его фиксации.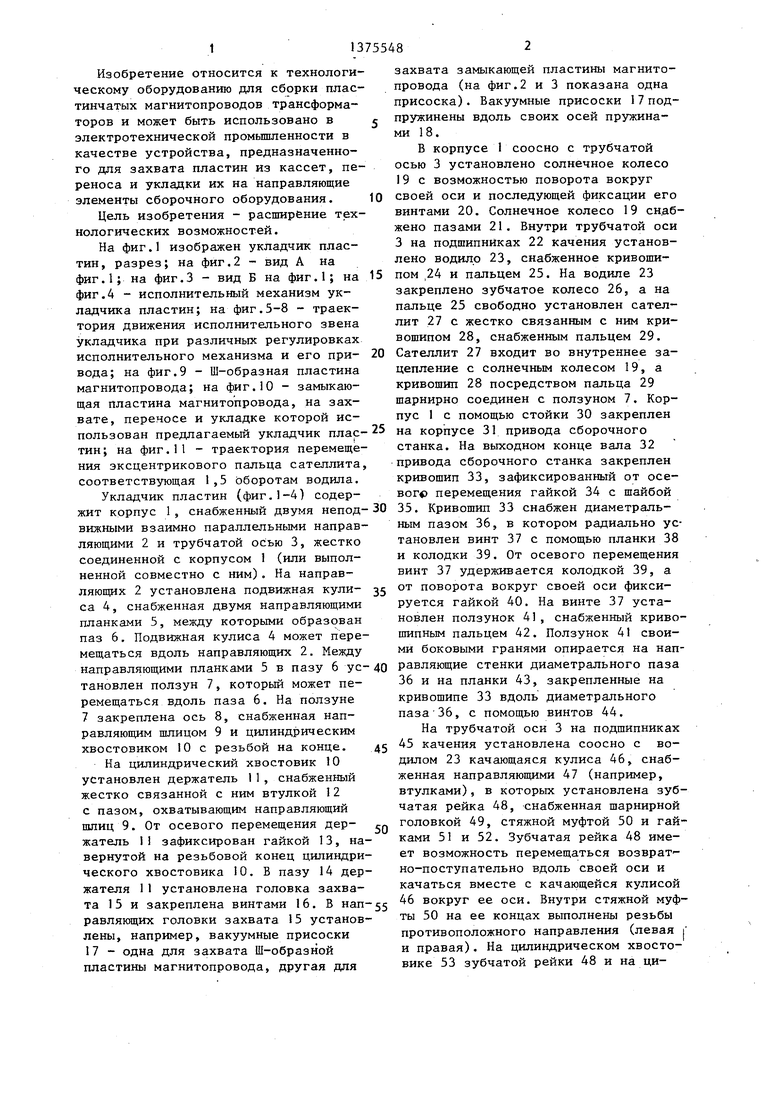
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1986 |
|
SU1399827A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ГОФРИРОВАННЫХ ФИЛЬТРОВ | 1991 |
|
RU2069153C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
Изобретение относится к технологическому оборудованию для сборки пластинчатых магнитопроводов трансформаторов, может быть использовано в электротехнической промьшленности в качестве устройства для захвата и подачи изделий и позволяет расширить технологические возможности устройства. Укладчик содержит корпус с установленным в нем держателем с закрепленной на нем головкой захвата пластин, кинематически связанный с ведомым звеном исполнительного механизма, и привод с зубчато-реечной передачей, кинематически связанный с ведущим звеном исполнительного механизма. Его корпус снабжен двумя неподвижными взаимно параллельными направляющими скалками для установки ведомого звена исполнительного механизма, расположенными в вертикальной плоскости. Исполнительный механизм выполнен в виде зубчато-кулисного планетарного механизма с длительными остановками ведомого звена. Ведомое звено и подвижная кулиса с пазом, расположенным перпендикулярно осям направляющих скалок, установлены на направляющие скалки с возможностью возвратно-поступательного перемещения вдоль них. Б качестве исполнительного звена использован ползун, установленный в пазу подвижной кулисы с возможностью возвратно-поступательного перемещения вдоль него. Держатель закреплен на ползуне, а привод с зубчато-реечной передачей выполнен в виде зубчато-кулисного механизма с рейкой. Кривошип привода и зубчатая рейка выполнены с регулируемой дпиной их звеньев. Солнечное колесо установлено в корпусе с возможностью поворота вокруг своей оси и последующей фиксации его. Водило с закрепленным на нем зубчатым колесом установлено в корпусе с возможностью реверсивного вращения. Сателлит с жестко закрепленным на нем кривошипом свободно установлен на пальце водила и входит во внутреннее зацепление с солнечным колесом, а кривошип шарнирно связан с ползуном. Кривошип привода, закрепленный на приводном валу сборочного станка, снабжен ра- диально установленным винтом без возможности осевого перемещения его, кинематически связанным с пальцем кривошипа. Качающаяся кулиса привода шарнирно установлена на корпусе соос- но с -водилом, а зубчатая рейка снабжена муфтой, установлена в направляющих качающейся кулисы с возможностью возвратно-поступательного перемещения вдоль своей оси и качательного движения вместе с качающейся кулисой вокруг ее оси, входит в зацепление с зубчатым колесом и шарнирно связана с пальцем кривошипа привода. 1 1 ил. S (Л со СП сл 4 00
234 Z 2819 27ZttZ2 22
г
г:з8
0
Фиг.
Захват пластин
Фиг. 5
J
Икладка пластин
Фиг.
Фиг. 6
Укладка пластин
вкладка пластин
.l
Фиг.9
Фиъ.11
Ч
SaxSam Фиг. 8 пАцстин
ФигЛО
| Привод грейферного подающего устройства | 1976 |
|
SU1094579A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
