00
4 «
о:
Изобретение относится к области машиностроения, в частности к конструкциям манипуляторов и промышленных роботов.
Известен промышленный робот, содержащий основание, механическую руку, выполненную в- виде планетарного механизма, приводы и исполнительный орган 1.
Недостатком этого pio6oTa являются его узкие технологические возможности из-за ограничений углов пово. рота звеньев механической руки.
Цель изобретения - расширение те.нологических возможностей промышленного робота.
Цель достигается тем, что промышленный робот снабжен пантографны механизмом и кривошипом, жестко связанным с сателлитом планетарного механизма, причем исполнительный орга шарнирно связан с этим кривошипом и с одним концом пантрграфного механизма, другой конец которого шарнирно связан с корпусом планетарного механизма.
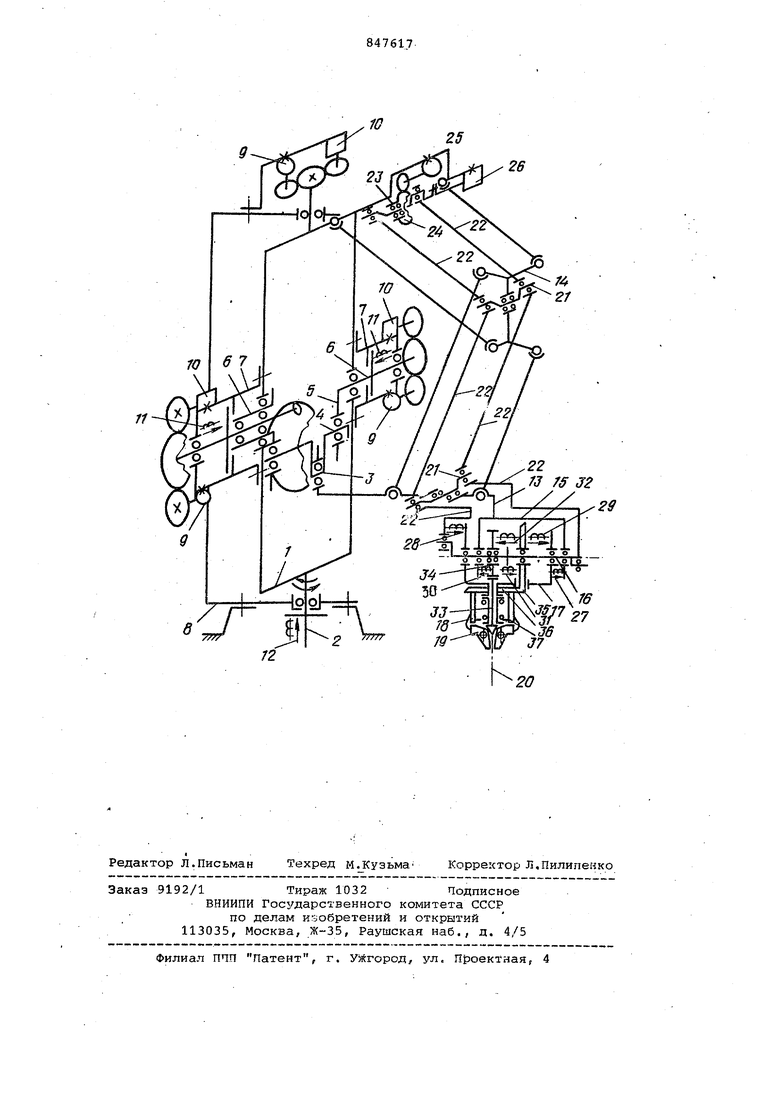
На чертеже показана кинематическая схема предлагаемого промышленного робота.
Промышленный робот состоит из планетарного механизма с одним водилом и одним сателлитом, смонтированного на рамном корпусе 1, имеющем вертикальную ось 2. Кривошип 3 эксцентрично укреплен на вращающейся ОСИ 4. Ось 4 смонтирована в подшипниках на водиле 5. Водило 5 неПОДВИЖ1НО укреплено на оси 6, а последняя через подшипники и промежуточные корпусы 7 укреплена.в рамном корпусе 1. Ось 2 рамного корпуса 1 с помощью подшипников закреплена в неподвижной станине 8. Оси 2, 4 и 6 снабжены индивидуальными приводами 9, преобразователями 10 для определения их углового поворота и электромагнитными муфтами 11 и 12 торможения.
Механическая рука 13 выполнена в виде планетарного механизма, связана с кривошипом 3 и может перемещаться с ним. Параллельное положение руки 13 во время перемещения ее с кривошипом 3 обеспечивает пантограф 14.
Правый конец руки 13 заканчивается жесткой вилкой 15, в подшипниках которой смонтирована ось 16. На оси 16 смонтирована кисть 17. На кисти 17 смонтирован корпус 18, а ; на нем - исполнительный орган механический захват 19. Таким образом механический захват 19 имеет возможность вращаться около оси 20 корпуса 18 и с кистью поворачиваться около оси 16. На пантографе 14 и на руке 13 с помощью коленчатых осей 21 попарно смонтированытяги 22, которые осуществляют кинематическую связь оси с осью 23. Тяги 22 на коленчатых осях 21 прикреплены на окружностях одинакового радиуса, но со сдвигом по углу на 90° с той целью, чтобы не создавались мертвые точки при повороте осей. На оси 23 смонтированы зубчатое колесо 24, сопряженное с шестерней привода 25, и круговой преобразователь 26, который выполняет функции элемента обратной связи.
В кисти 17 смонтированы приводные и тормозные электромагнитные муфты 27 - 32 для управления ее движением и движением исполнительного органа - захвата 19. Шток 33 и эксцентрик 34 служат для сообщения движения захвату 19. Конические шестерни 35 и 36 через корпус 18 сообщают захвату 19 вращения около оси 20. На корпусе 18 установлены пружины 37.
Робот действует следующим образом.
Перед установкой кисти 17 механической руки 13 с захватом 19 в заданную точку с помощью системы программного управления (не показа.на) определяют ортогональные координаты искомой точки. В системе эта информация счетным механизмом преобразовывается в соответствующие величины углового поворота. После выбора нужных координат приводы 9 вращают оси 2, 4- и 6, в результате чего кисть 17 робота с захватом 19 перемещается в сторону искомой точки. Текущее положение осей 2, 4 и 6 отражают круговые преобразователи 10 которые в устройстве выполняют функции элементов обратной связи. После отработки заданных ухлов поворотов осей 2, 4 и 6 по данным круговых . преобразователей 10 включаются электромагнитные муфты 11 и 12 торможения и останавливают вращения осей 2 4 и 6 в нужном положении. Одновременно подается сигнал для выключения приводов..
Движения кисти 17 и захвата 19 для зажима и разжима предметов и для ориентирования предметов осуществляется от привода 25, смонтированного на рамном корпусе 1. От привода 25 через шестерню 24,вращает,ся ось 23, а от нее через коленчатые оси 21 и тяги 22 вращение получает и ось 16.От оси 16 движение в нужный момент передается через магнитные муфты всем подвижньгл элементам кисти 17 и захвата 19 следующим образом Кисть 17 в нужном положении фиксируется тормозной электромагнитной муфтой 27.При повороте кисти 17 вокруг оси .16 выключается тормозн{ я муфта.2 включаются электромагнитная муфта 28 и привод 25. Нужная величина поворота кисти вокруг оси 16 определяется количеством импульсов кругового преобразователя 26, который вращается всегда с осью 23. После отработки заданного количества импульсов по данным преобразователя 26 подается команда на включение тормозной муфты 27, отключение муфты 28 и на остановку привода 25.
Движение пальцев механического захвата 19 осуществляется иггоком 33 который при осевом перемещении вниз коническим наконечником, раздвигая шарнирные пальцы с одной стороны, другими концами пгшьцев зажимает предмет. Шток 33 перемещается вниз в осевом направлении от эксцентрика 34, вращения которого осуществляются ST оси 16 включением электромагнитной муфты 32, а фиксация - мутой 30. Шток 33 поднимается за счет пружин 37 при соответствующем повороте эксцентрика. Поворот захвата с
.предметом вокруг оси 20 осуществляется коническими шестернями 35 и 36 которые получают вращения от оси 16 включением электромагнитной муфты 31, Поворот контролируется преобразователем 26. Шестерня 35 фиксируется тормозной электромагнитной муфтой 29 Поэтому при данной конструкции все подвижные части кисти 17 и захва - та 19 получают движения от оси 16
0 через электромагнитные муфты, величины поворотов контролируются одним преобразователем 26, а фиксация установленных положений.движущихся частей кисти 17 и захвата 19 робота осуществляется тормозными электромагнитными муфтами.
Использование предлагаемой конструкции обеспечивает по сравнению с существующими конструкциями робо0тов расширение их технологических возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот (его варианты) | 1983 |
|
SU1120586A1 |
| Промышленный робот | 1985 |
|
SU1310198A1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Универсальный привод шагового перемещения | 1989 |
|
SU1778410A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Промышленный робот | 1978 |
|
SU863093A1 |
| Педальный механизм | 1990 |
|
SU1806800A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий основание, механическую руку, выполненную в виде планетарного механизма, приводы и исполнительный орган, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен пантографным механизмом и кривошипом, жестко связанным с сателлитом планетарного механизма, причем исполнительный орган шарнирно связан с этим кривошипом и с одним концом пантографного механизма, другой конец которого шарнирно связан с корпусом планетарного механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кобринский А.Е | |||
| и др | |||
| Принципы построения двигательной системы автоматических манипуляторов с программным управлением Ч промышленных роботов) | |||
| Станки и инструмент, 4, 1976, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
