77
77-,
г.2.
13
виде двухступенчатой зубчатой передачи или двухступенчатой цепной передачи, позволяющей с помощью двигателя 5 гфивода перемещения оси 12 водила 11 планетарного механизма регулировать положение механической руки. Для этого ведущее звено дополнительной передачи закреплено на оси, установленной в поворотном корпусе 2 с возИзобретение относится к машиностроению, в частности к конструкциям манипуляторов и промышленных роботов.
Цель изобретения - расширение технологических возможностей за счет увеличения зоны обслуживания.
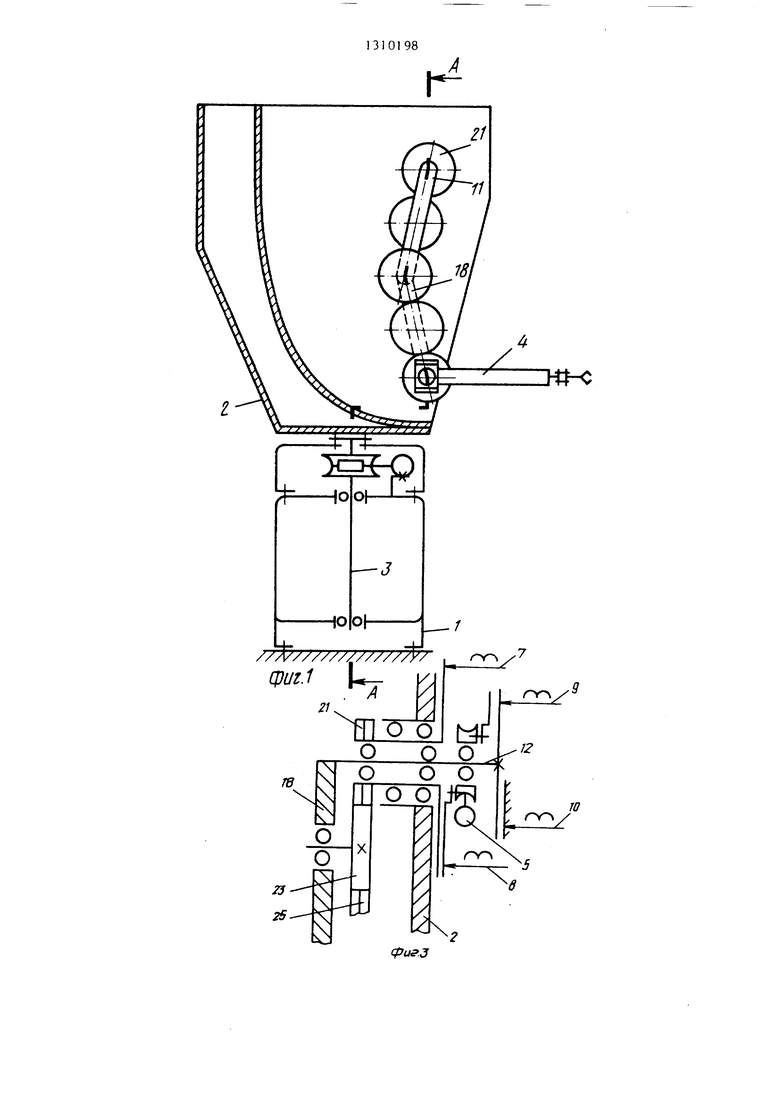
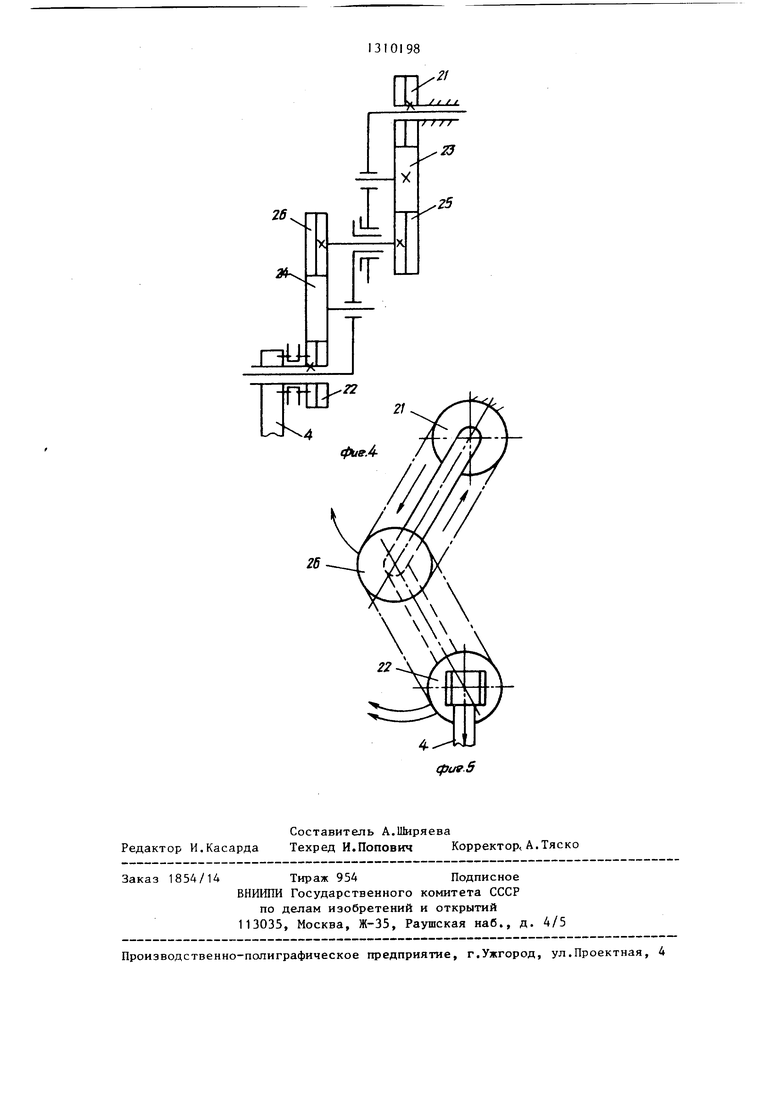
На фиг.1 показан промышленный робот; на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема соединения оси водила с двигателем; на фиг.4 - кинематическая схема двухступенчатой зубчатой передачи; на фиг.З - кинематическая схема двухступенчатой цепной передачи
ПромьпЕленньй робот состоит из основания 1, поворотного корпуса 2, имеющего возможность вращения вокруг оси 3, установленной на основании 1 посредством подшипников.
На поворотном корпусе 2 установлена механическая рука 4 с исполнительным органом и привод ее перемещения, включающий двигатели 5 и 6 и четрые электромагнитные муфты 7-10, а также основную передачу, имеющую двухпо- точный планетарный механизм и дополнительную передачу.
Водило 11 двухпоточного планетарного механизма закреплено на оси 12, установленной посредством подшипников 13 и 14 в поворотном корпусе 2. Кго сателлит 15 установлен на оси 16 водила 11 посредством подшипников 17 и жестко связан с кривошипом 18, несущим механическую руку 4. Последняя может перемещаться путем вращения ее вокруг оси 12 водила 11 и оси 16 сателлита 15. Вращение вокруг оси 12 водила 11 осуществляется от двигателя 5 через червячную передачу, а вращение вокруг оси 16 сателлита 15 - от двигателя 6 через червячную пере198
можностью поочередного взаимодействия с поворотным корпусом 2 и выходным валом двигателя 5, а ось 12 водила 11 планетарного механизма установлена в поворотном корпусе 2 коаксиально оси ведущего звена дополнительной передачи с возможностью поочереднйго взаимодействия с поворотным корпусом 2 и выходным валом двигателя 5, 2 з .п.ф-лы,5 ил.
5
0
дачу и цилиндрическую зубчатую передачу. Ведущее зубчатое колесо 19 закреплено на оси, установленной коаксиально оси 12 водила 11 в поворотном
корпусе. Ведомое зубчатое колесо 20 жестко связано с сателлитом 15. При этом ось 12 водила 11 установлена с возможностью поочередного соединения с поворотным корпусом 2 посредством электромагнитной муфты 10 и с червячным колесом посредством электромагнитной муфты 9. Заданное положение механической руки 4 обеспечивается дополнительной передачей, выполненной, например, в виде двухступенчатой передачи или двухступенчатой цепной передачи.
Ведущее звено 21 дополнительной передачи, например, ведущее зубчатое колесо первой ступени двухступенчатой зубчатой передачи или ведущая звездочка первой ступени двухступенчатой цепной передачи, закреплено на 5 оси, установленной в поворотном корпусе 2 коаксиально оси 12, с возможностью поочередного соединения с поворотным корпусом 2 посредством электромагнитной муфты 7 и с червячным Q колесом и двигателем 5 посредством электромагнитной муфты 8. Ведомое звено дополнительной передачи, например, ведомое зубчатое колесо 22 второй ступени двухступенчатой зубчатой передачи или ведомая звездочка вто- рой ступени двухступенчатой цепной передачи, жестко закреплено на кривошипе 18. Промежуточные зубчатые колеса 23 и 24 первой и второй ступени
. двухступенчатой зубчатой передачи закреплены соответственно на водиле 11 и сателлите 15. Ведомое зубчатое ко
лесо 25 первой ступени и ведущее зубчатое колесо 26 второй ступени смонтированы на оси 16 сателлита 15. Во всей цепи зубчатых колес осуществлен предварительный натяг путем разрезных зубчатых колес 21, 25, 26, 22. Двигатели 5 и 6 могут быть выполнены в виде регулируемых двигателей постоянного тока .типа ДК-1 и ДП, либо шаговых двигателей.
Промышленный робот работает следующим образом.
На нужную позицию механическая рука устанавливается посредством перемещения (вращения) оси кривошипа 18 относительно оси 12 водила 11 и оси 16 сателлита 15.
Вращение вокруг оси 16 сателлита осуществляется от двигателя 6 с левой стороны (фиг.2) через червячную передачу и пару цилиндрических зубчатых колес 19 и 20.
Вращение вокруг оси 12 водила 11 осуществляется от двигателя 5 (фиг. 2 и 3) через червячную передачу. При вращении оси 12 водила 11 включаются электромагнитные муфты 7 и 9, выключаются электромагнитные муфты 8 и 10 и включается двигатель 5. В этом случае муфта 7 неподвижно крепит веду- щее звено дополнительной передачи 21 к поворотному корпусу 2, обеспечивая заданную ориентацию механической руки 4.
Изменение положения механической руки 4 осуществляется от двигателя 5. Для этого включается муфта 9, отсоединяется червячное колесо с двигателем 5 от оси 12 водила 11. Одновременно включается муфта 10. Этим фик- сируется водило 11. Затем включается муфта 8, которая соединяет червячное колесо и двигатель 5 с веду1цим звеном 21. Одновременно включается муфта 7 и снимается фиксация ведущего зве- на 21.
Таким образом, варьируя включением и выключением муфт, можно вращать ось 12 водила 11 и фиксировать ведущее звено 21, т.е. обеспечить необходи- мую ориентацию механической руки 4,
o
5
0
5
5 0
или менять ее ориентацию при фиксированном положении оси 12 водила 11.
Формула изобретения
1.Промьшшенный робот, содержащий основание, поворотный корпус, уста- новленньй на основании и несущий механическую руку с исполнительным органом, и привод перемещения механической руки, включающий двигатели, основную передачу, имеющую двухпо- точный планетарный механизм, водила которого связаны с двигателем посредством червячной передачи, а сателлиты жестко связаны с кривощипом, и дополнительную передачу, ведомое звено которой закреплено на кривошипе, несущем механическую руку, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен электромагнитными муфтами, две из которых установлены на поворотном корпусе с возможностью поочередного взаимодействия с ведущим звеном дополнительной передачи и осью водила двухпоточного планетарного механизма, а две другие установлены на червячном колесе червячной передачи с возможностью взаимодействия с ведущим звеном дополнительной передачи и осью водила двухпоточного планетарного механизма.
2.Робот ПОП.1, отличающийся тем, что дополнительная передача выполнена в виде двухступенчатой зубчатой передачи, при этом ведомое зубчатое колесо первой ступени и ведущее зубчатое колесо второй ступени смонтированы на общей оси сателлита, а оси промежуточных зубчатых колес связаны соответственно
с водилом и сателлитом основной передачи .
3.Робот ПОП.1, отличающийся тем, что дополнительная передача выполнена в виде двухступенчатой цепной передачи, при этом ведомая звездочка первой ступени и ведущая звездочка второй ступени установлены на оси сателлита.
№

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1527072A1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| Трансмиссия машины с бортовым способом поворота | 2024 |
|
RU2824226C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| Электроусилитель рулевого управления | 2019 |
|
RU2725016C1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ УНИВЕРСАЛЬНО-ПРОПАШНОГО ТРАКТОРА | 1991 |
|
RU2025306C1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
Изобретение относится к области машиностроения, в частности к конструкциям манипуляторов и промышленных роботов. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания. Цель достигается тем, что привод перемещения механической руки снабжен дополнительной передачей в - А 21 S ел со СО 00
/7/7.
cpui.i
21
НШ
re
О
о
hо
О
О О
| Промышленный робот (его варианты) | 1983 |
|
SU1120586A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
