Особенность предлагаемого автомата в отличие от известных заключается в том, что, с целью группирования бутылок соответственно расположению гнезд в ящике, группировочное устройство выполнено в виде четырехрядного пластинчатого конвейера, разделенного сг пенчато расположенными перегородками с вмонтированными в них лепестковыми поворотными разделителями для раздвигания бутылок в рядах на участке конвейера, ограниченном подвижным упором и входной звездочкойшагомером, оборудованной блокировочным приспособлением для пропуска определенного количества бутылок.
На конвейере подачи ящиков монтирован подъемный стол, связанный при помощи роликовых цепей и однозаходных муфт с механизмом переноса бутылок и оборудованный фиксирующими ящик рычажно-роликовыми захватами с блокировкой подъема и подачи следующего ящика.
Механизм переноса бутылок вы полнем в виде каретки, передвигаюп,ейся вверх, вниз и в сторону по дуговым направляющим и снабженной захватами, расположенными соответственно рядам бутылок. Захваты выполнены в виде подрезиненных планок с прорезями для венчиков бутылок, сходящихся и расходящихся при помощи серповидных рычагов, щарнирно соединенных с дуговыми держателями планок таким образом, что они образуют самотормозящий затвор для удержания бутылок.
Между ящиками и механизмом переноса бутылок установлена направляющая рещетка, снабженная снизу направляющими и расходящимися книзу пазами, в которые входят крестовины гнездовых перегородок ящика; стороны гнезд решетки сверх снабжены наклонными к середине сторон вырезами.
№ 112199
Автомат может быть п)имсиеи д.пя обратислО jiponecca - выемки бутылок из ящика путем переклкчепия порядка работы захватов механизма переноса, снятия групнпровочного устройства и пуска конвейера в обратном направ.1е11ии, а также установки наг1ра1(,тяюп1ей ре1петки с круглыми пентрИруюп1,ими отверстиями.
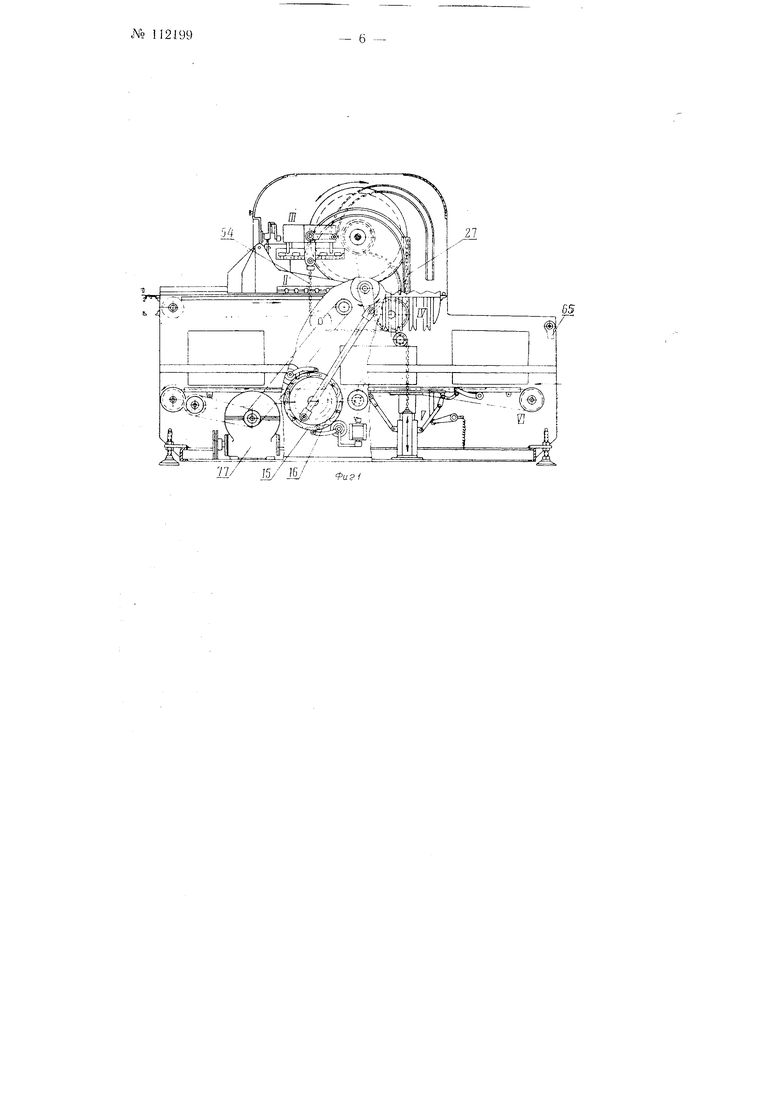
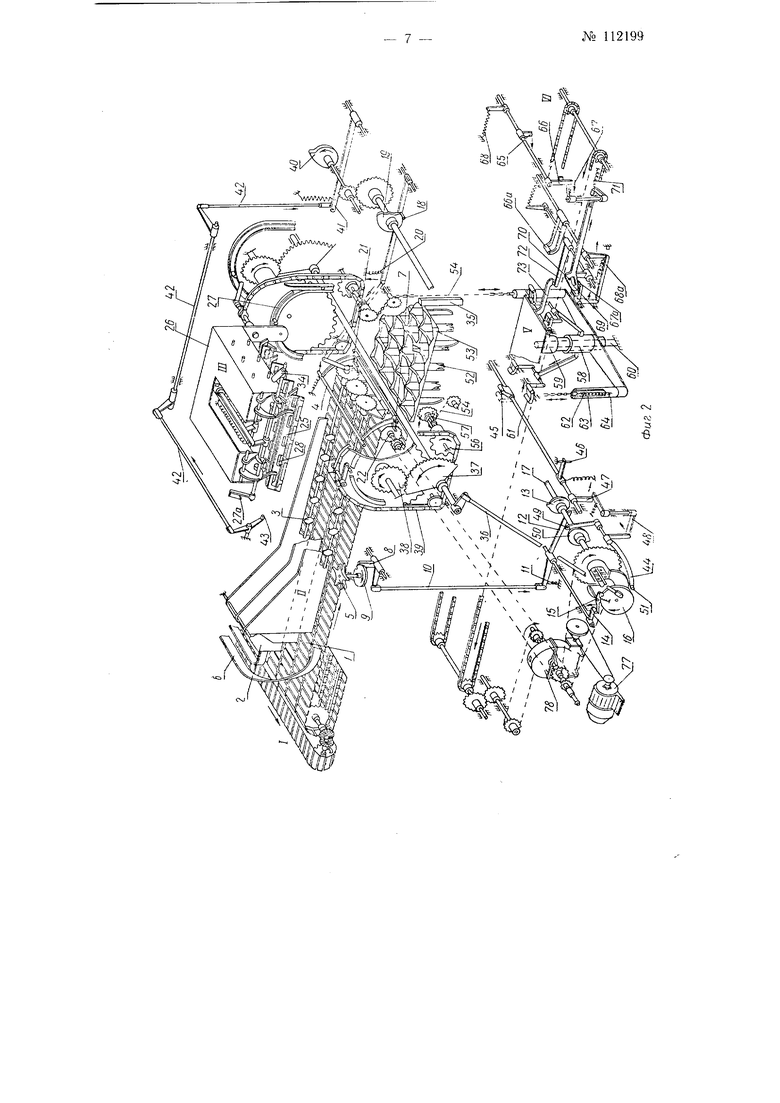
Ыа фиг. 1 изображен обишй вид автомата; на фиг. 2 сто к1П1ематпческая схе.ма; на фиг. 3-.теиестковый новоротньи разделнте.ль д.чя раздвигания буты.л( на фиг. 4-захват механизма переноса бутылок; на фиг. 5-разрез но ААББ на фиг. 4; на фиг. 6-разрез но ВВ на фиг. 4; на фиг. 7 и cS- - нанра1;.;1Я10ни1я ре1нетка с круг.тыми центрирующими отверстиями, в двух проекциях.
В авгомате предусмотрен конвейер /, подающи бутылки на группировочное устройство //, устанавливакмлее бутылки соответстненио расположению гнезд в ящике.
Устройство // нредстав.тяет собою четырехрядный н.тастинчатый ко111 ейер /, разделенный ступенчато расноложеннымн перегородками 2. В нерегородки 2 BMonTl-ipOBaHH .1епеетк()вые поворотные разде.лите,ти 3 для раздвигания бутылок в рядах на участке конвейера, ограниченном подвижным упором 4 и входной звездочкой-HjaroMepOM 5. Бутылки с конвейера / через устье, образоваппое направляющими п/1анками 6, попадают на нервук) ленту четь1рех|)ядного конвейера /. Поочередное заполнение всех четырех лент обеснечивается перегородками 2. образующими коридоры со ступепчаты.ми входами.
Задержка бутылок в правой части пеирерывно движун1егося к яшейера гарантируется иодвижны.м упоро.м 4, установленным на двух осях 7. БуГылки, запо.тняю1ние последнюю, четве)тую ленту, вранино входную звездочку-шагомер 5. При отсчете пятой бутылки (двадцатой д.тя всего комплекта) иа.чец 8 входит в паз диска 9 и звездочка фиксируется, сдерживая напор следующих бутылок. Одповременно 10 (автоблокировки) под действием пружины // смеииется вниз, ролик рычага 12 ложится на поверхность ку.:1ачка /, а ролик 14 отходит ввер.х и собачка 15 западает в паз диска 16 кривопшиа. С пача;1ом вращения Ba.ia 17 ро.лик 18 соскальз1)1вает с выступа кулачка 9 и система рычагов иод действием пружины 20 иеремен ает-ся вверх, поворачивая И1естер:11и 21 в направлениях, показанных стрелками на фиг. 2. При этом ироисходит пс)ворот на 90° двух рядов .теиестковых |1азде.тителей 3, усечен 1ые 1)ани которых раздвигают два соседние ряда буты.юк.
Раздвигание бутылок де.тается возможным благодаря тому, чю в момент поворота разде.титс-лей нодв1 Ж |ой упор 4 иод нажимом рычага 22 отходит в направлении движения коиве1 1ериых ,1епт, ослаб.1яя нагюр бутылок на груннировочном устройст ве //. Таким образом бутылки группируются по 20 иггук с соб;1юдепием расстояпия между ни.ми. равного расстоянию между гнездами . До прохода через звездочкущагомер 5 последней двадцатой бутьмкн унор 4 находится в положении, изображеином на фиг. 3 пунктиром. П)н этом буты.лки стоят на устройстве // вплотную друг к другу. Когда звездочка-HiaroMep задерживае1 продвижеии|е двадцать nepBoii бутылки 23, упор 4 отходит в сторону движения конвейера на 32 мм, а лепестковые разделители 3 поворачиваются на 90°, Задерживаясь на усеченных гранях разде.жителей, как показано йа фиг. 3 сплощны.мн .тиниями, буты;|ки нрижимаются к противоположным степкам проходов 24 и образуют группу из двадцати Н1тук, Сгруппированные устройством // буты,тки с НОМО1ЦЫО захватов 25 механизма переноса /// перекосятся в направляюи1ую рен1етку IV, координирующую переносимые бутылки с гнездами яншка.
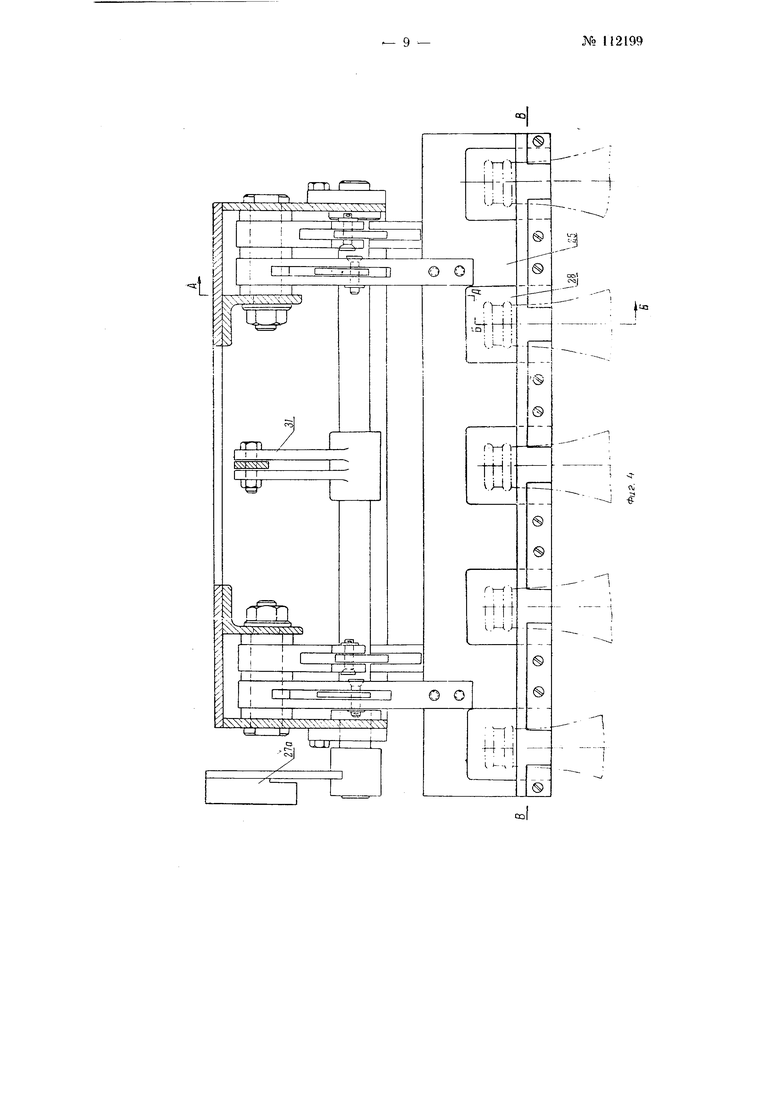
Механизм переноса /// выполнеи в виде каретки 26, передвигающейся вверх, ргиз и в сторону по ду1овым иаправ.ляющим 27. Каретка снабжена четырьмя рядами захватов 25, расположенных соответственно рядам бут зглок; каждый из захватов забирает пять бутылок. Захваты 25 выпОлпены в виде нодрезиненных, снабженных прорезями 28 для венчиков бутылок планок, схоляп,ихся и расходящихся при иомопш серповидных рычагов 29. Оси 30 всех четырех рядов захватов связаны рычажным шарниром 31 и благодаря этому действуют одновременно. В момент прихода механизма переноса в по.тожение, при котором раскрытые планки захватов 25 встают против гор.льника бутылок, сгруппированных на устройстве //, рычаг 27а автоматически сдвигается (фиг. 1) и все четыре оси 30 поворачи15аются против часовой стрелки. Это вра1нение увлекает за собой серповидные рычаги 29, связанные с шарнирами 32 захватов. Последние сближаются и п.панки захватов обжимают горльпики бутылок, венчики которых попадают в прорези 28. При этом концы серповидных рычагов, скренленных е плапками 33, пересекают горизонтальную линию оси 30, фиксируя нланки захватов в закрытом по.южении. TaKoii самотормозян;ий затвор, несмотря на отсутствие пружин, исключает возможность выпадания бутылок из механизма переноса, так ;:ак всякие усилия, направленные на разжим захватов, вызывают обратные усилия, сближа1ОИ1,ие По1а1жи вследствие зам1)1каюи 1его действия рычагов 29. Захваты могут быть раскрыты только обратным вращением осей 30 против часовой стре.тки, когда рычаг 34, спаренный с рыча1Ч1м 27а, приходит во взаимоде|1С1вие с иеподвижпым упорол 35.
В исходном ноложении, показанном на фиг. 1, когда на конвейере / еще не укомплектована грунпа из двадцати буты.юк, механизм переноса бутылок /// находится па ноло1 ипе пути между конвейером / и рещеткой IV. Планки захватов 25 раскрыты. После входа на конвейер / двадцатой бугы.пки звездочка-HiaroMep 5 фиксируется на пальце ( автоблокировки и собачка 15 входит в иаз диска J6 кривошипа. При вращении кривошипа нштун 36 сообщает дву.м зубчатым секторам 37, И1естерпям 33 и цепям 39 движение в направлениях, указанных етре.тками.
В момент г|е)ехода механизма переноса /// из исходного положения в положение влево вниз кулачок 40 нажимает на рычаг 41 и, перемещая систему тяг 42 и ро.лик 43, иоворачивает рычаг 27а, сближаюи1ий планки захватов 25. Последние обжимают горльиики бутылок таким образом, что венчики оказываются в прорезях 28.
При возвращении механизма переноса в исходное положение, что соответствует повороту диска 16 кривошииа на 180, ролик/( оказывается :ца выстуне кулачка 19. Шестерни 21 поворачиваются в направле1ШИ, обратном показаппомч стрелками на фиг. 2, б.тагодаря чему упор 4 и лепестковый разделитель 3 станав.1иваются в исходное ноложени.е. Одновременно кулачок 13 нажимает на рычаг 12 блокировки звездочки -HiarOMepa 5 и налец 8 выходит из зацепления с пазом на диске 9. Если в момент перехода механизма переноса /// через верхнее исходное положение на подъемном сто.че 1 не окажется ящика, то хвостовик собачки 15 заденет за ролик рычага 44, что разъединит собачку 15 с диском 16 кривошипа, и механизм переноса /// остановится. При наличии на подъемном столе V ящика последний, увлекаемый цепным конвейером V7, нажимает на блокирующую скобу 45 и поворачивает ее в положение, показанное пунктиром, на угол, ограниченный упором 46. Рычаги 47 и 48 отводятся в нанравлении стрелок па фиг. 2 и освобождают планку рычага 44- Ролик 49 лоКится па кулачок 50, а ро.тик 5/ рычага 44 отходит от диска 16 кривошипа. Собачка 15 не включается, и механизм переноса, не останавливаясь, продолжает движение вправо вЧз к решетке fV. При дальнейшем врашепии вала 17 выступ кулачка 5G отжимает ролик 49 ц планка рычага 44 снова фиксируется на уступе рычага 48 на случай отсутствия ящика в следующем цикле работы автомата.
№ 112199 - 4 -Когда механизм ic)enoca переместится в крайнее правое нижнее положение и бутылки погрузятся в гнезда решетки IV, рычаг 34, спаренный с рычагом 27а, придет во взаимодейетвие с неподвижным упором 35, планки захватов 25 раскроются и бутылки упадут в .
Для обеспечения попадания бутылок захватов механизма переноса в отверстия рен.етки ное.педияя снабжена направляюп ими пазами 52, в которые входят крестовины гнездовых перегородок ян1ика, а стороны гнезд рен1етки имеют наклонные к середине сторон вырезы 53.
Подъемный стол V приводится в движение двумя цепями 54, накручивающимися на звездочки 55. Сценлепне звездочек 55 со звездочками 56, входящими в систему механизма иереноса, осуи1еств;1яе1ся с помощью однозаходных муфт 57. Такая система связи между механизмом переноса и механизмом стола подъема обеспечивает подъем яншка, когда механизм захвата движется из исхоаного в крайнее нижнее положение, и опускание ящика, когда механизм переноса возврани1ется в исходное положение. При движении вверх цепи 54 поднимают муфту 58 и последняя, упираясь в уступ ко-лоики 59, тюднимае сгол I по вертикальной направ.тяющей оси 60. Одновременно ро.ликовые фиксаторы 61, двигаясь в н.аправлени -1 стрелок (фиг. 2), приближаются к передней и задней етенкам , предохраняя его от возможньгх сдвигов во время подъема, могуи1,их затруднить пентровку гнезд отноепте.ПзПо решетки IV.
Когда ящик подпимаетсн вьппе б;1окирук)Н1ей скобы 45, отжатой им ранее в по гожение, показаппое пунктиром на фиг. 2. иос.чедняя возвращаетея в первоначальное положение и оказываетея, таким образом, уже под дном . При подходе ящика к верхней точке подъема крестовины деревянных перегородок ящика, образующих i-пезда, попадают в крестообразпые, имеющие форму раструбов пазы 52 на 1пгж1 их кониах жестких направляю цих ренлстки IV, что гарантирует надежную центровку гнезд ящика с гнездами решетки. В момент возврата стола V в нижнее положение дно Я1цика поджимает под себя блокируюп1ую скобу 45, роликовые фиксаторы 61 разжимаются и цегпюй копвейер выносит ящи.к из автомата. Скоба 45 под действием уравновешивающей ее пружины подпимается в исходное положение и задерживает с.чедующпй пустой ян1,ик. В авари1 п1ьгх с.тучаях, когда li автомат поиадает ящик со сломанными гнездами, нестандартн1 1Й li/ni с из.1ин|пе высокими гнездовыми перегородками, тюдъем сто.ча ||)екращается из-за растяжения пружины 62 и телееконичееких труб 63 64. (., не,1ью задержки яии1ков па входе в автомат во работы под-ьемного сто.ча, иредусмотрепа автоблокировка, работающая следуюищм образом.
При свободном подъе.мном сто.те оче|) ящик. у1 ;1екаемый цепным конвейером VI, проходит в автомат вре.меиио отклоняя ci-оим верхом замок 65 в нанравлении стрелки (см. фиг. 2). П.панка 66, ук)епленная на той же оси, сБпбодно сдвигается в;|ево. мииуя уступ на рычаге 67, и после прохода япдика возвращаечся в исходное ио.тожение пружиной 68. Перед ноступлеиие.м на CTO;I ящик своим весом иажи.мает на подпрул ипенную консоль 66а и ролик 67а системы рычагов .. ирииоднимает конец тяги 69 и выводит ее из .чащчмения с иал1Л1ем 70. Пружина 7/ оттягивает тягу 69 вправо, до задержки горизоптальиой прорези на пальце 70. Рычаг 67 приближается к планке б б и запирает ее на уступ. Таким образом, следуюпщй Я1пик будет задержан замком 65. Когда стол поднимает вощедпп1й на него Я1иик. ролик рычага 72 оевобождается от давления кроннггейиа 73 стола и под действием пружины подпимается вверх. Одновременно пален 70 поднимает тягу 69 п вновь западает в ее вертикальную прорезь. При движепии стола вниз кронщтейн 73 нажимает на поднявшийся рычаг 72, палец 70 отводит тягу 69 и рычаг 67 в исходное положепие, и.чанка 66 освобождается и замок 65 вновь открывает вход очередному ян1ику в автомат.
Автомат может быть применен и для выемки бутылок из ящиков. Для этой цели переключают порядок работы захватов механизма переноса, обеспечив их сжатие при подходе к поднятому столом яи1ику с бутылками и раскрытие во время остановки над конвейером; снимают механизм группирования бутылок с четырехленточпого конвейера, сообщив конвейеру движение в обратном направлении; снимают , через которую бутылки опускаются в ящики и устанавливают направляющую решетку 75 (фиг- 7 н 8) с. круглыми центрируюн1ими отверстиями и со скошенными направляюпдими 76, фиксирующими ящик за внутренние боковые поверхности стенок. Автомат приводится в движение от электродвигателя 77 через редуктор 78.
Предмет изобретения
1.Автомат для группирования и установки бутылок в стандартные ящики с перегородками с применением подающих бутылки и ящики конвейеров и механизма переноса бутылок с конвейера в ящик, отл и ч а ющ и и с я тем, что, с целью груннирования бутылок соответственно расположению гнезд в ящике, группировочное устройство выиолиено в виде четырехряд1 ого пластинчатого конвейера, разделенного ступенчато расположенными перегородками с вмонтированными в них ленестковыми поворотными разделителями для раздвигания бутылок в рядах на участке конвейера, отграниченном подвижным упором и входной звездочкойшагомером, оборудованной блокировочным приспособлением для пропуска определенного количества бутылок.
2.Автомат по п. 1. отличающийся тем, что на конвейере подачи ящиков монтирован подъемньп стол, связанный при помощи роликовых цепей и однозаходных муфт с механизмом переноса бутылок и оборудованный фиксирующими ящик рычажно-роликовыми захватами с блокировкой подъема и подачи следующего ящика.
3.Автомат по пп. 1 и 2, о т л и ч а ю щ и и с я тем, что механизм переноса бутылок вынолнен в виде каретки, передвигающейся вверх, вниз и в сторону по дуговым направляющим и снабженной расположенными соответственно ряда.м бутылок захватами, выполненными в виде подрезиненных с прорезя.мн для венчиков бутылок планок, сходя1цихся и расходящихся при помощи серповидных рычагов, шарнирно соединенных с дуговыми держателями планок таким образом, что они образуют самотормозящий затвор для удержания бутылок.
4.Форма выполнения автомата но пп. 1-3, о т л и ч а ю ща я с я тем, что, с целью координирования нереносимых бутылок, с гнездами ящика, между последним и механизмом переноса установлена направляющая решетка, снабженная снизу направляющими и расширяющимися книзу Па., в которые входят крестовины гнездовых перегородок , а стороны гнезд решетки свер. снабжены наклонными к середине сторон вырезами.
5.Применение автомата по пп. 1-3 для обратного процесса-выемки бутылок из ящиков путем переключения порядка работы захватов механизма переноса, снятия группировочного устро1 |ства и пуска конвейера в обратном нанравлении, а также установки направляющей рещетки с круглыми центрирующими отверстиями.
7ДП
о
та осу
-1

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для автоматического заворачивания бутылок в бумагу | 1957 |
|
SU113978A1 |
| Автомат для наклейки этикеток на бутылки | 1955 |
|
SU103298A1 |
| Автомат для укупорки бутылок | 1954 |
|
SU103121A1 |
| Автомат для изготовления алюминиевых колпачков, вставки в них прокладок и укупорки бутылок | 1958 |
|
SU121044A1 |
| Приспособление для осмоления горлышек закупоренных бутылок | 1952 |
|
SU99620A1 |
| Механизм захвата бутылок в машинах для их осмаливания и опечатывания | 1952 |
|
SU112369A1 |
| Дозатор к машине для розлива водочных и винных изделий | 1954 |
|
SU101225A1 |
| Машина для предварительной мойки загрязненной посуды | 1958 |
|
SU117558A1 |
| Автомат для переворачивания перед световым экраном бутылок с ликероводочными изделиями при бракераже | 1951 |
|
SU95603A1 |
| Автомат для укупорки бутылок корковой пробкой | 1951 |
|
SU97734A1 |



КхКУчУчЧ
Q
® ®
rH-i
-ff
XI
чУ.ЧЧК.УчХКХУ
rt-1n-Hi.i-i.jo о
1
Разрез 1:0 Дй-Бб
L
Фиг. 5
