2. Устройство по п. 1, о т л ичающееся тем, что блок управления содержит переключатели, блок элементов задержки, делитель частоты, элементы задержки, ревер-г сивный счетчик, источник опорного напряжения, элемейт И и элемент ИЛИ, объединенные информационные входы последних являются первым входом бло ка управления, вторым входом которого является первый вход первого переключателя, выход которого соединен с входом делителя частоты, первый выход которого через первый элемент задержки подключен к управляющим входам элемента И и элемента ИЛИ, выходы которых соединены с входами реверсивного счетчика, выходы которого подключены к входам блока элементов
аадержки и являются вторым выходом блока управления, пятым выходом которого являются выходы блока элементов задержки, первый выход делителя частоты соединен с входом второго I элемента задержки и является первым выходом блока управления, второй выход делителя частоты подключен к входам третьего и четвертого элементов задержки, к первому входу второго переключателя подключен первый выход источника опорного напряжения, второй выход которого соединен с вторыми входами переключателей, выходы третьего элемента задержки и переключателей являются третьим выходом блока управления, четвертым выходом которого гшляются выходы второго и четвертого элементов задержки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы транспортного средства | 1986 |
|
SU1345222A1 |
| Устройство для контроля работы транспортных средств | 1986 |
|
SU1446638A1 |
| Устройство для контроля работы транспортных средств | 1982 |
|
SU1045240A1 |
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРИЕМНИКОВ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1990 |
|
RU2018150C1 |
| Устройство для спектрально-временного анализа сигналов | 1989 |
|
SU1711109A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| Устройство для приема и обработки информации | 1979 |
|
SU855715A1 |
Изобретение относится к вычислительной технике и может быть использовано для экспресс-анализа процессов, протекающих в узлах и деталях транспортного средства во время дорожных или стендовых испытаний, а также в лабораторных условиях для обработки информации, зарегистрированной на магнитном носителе.
Известно бортовое устройство для контроля и регистрации показателей работы транспортных средств, позволяющее измерять дисперсию слз айного процесса в пяти частотных полосах и содержащее датчик, тензоусилитель, полосовой фильтр, усилитель, блок преобразования, элемент И, индикатор, блок формирования и преобразования сигналов времени (ll .
Недостатками указанного устройства являются необходимость проведения дополнительных вычислений, невысокая точность и малое быстродействие .
Наиболее близким по технической сущности к изобретению является устройство для контроля работы транспортного средства, содержащее поспед вательно соединенные датчик, первый усилитель, полосовые частотные фильт ры, коммутатор, второй усилитель
аналого-цифровой преобразователь, микропроцессор (арифметический еЗлок и блок индикации, кроме того, последовательно соединены генератор импульсов, блок управления и программный блок, причем выход аналого-цифрового преобразователя подключен к второму входу блока управления, а выход программного блока подсоединен к второму входу микропроцессора i выходь} блока управления подключены к вторым входам коммутатора, второго усилителя и аналого-цифрового преобразователя 2 .
Недостатками известного устройства являются невысокая точность и малое быстродействие. Невысокая точность обработки информации обусловлена применением в устройстве аналоговых полосовых частотных фильтров. Малое быстродействие является следствием большой вычислительной нагрузки на микропроцессор при выполнении умножений в процессе определения статистических моментов исследуемлх процессов второго и более высоких порядков (например, при определении дисперсии виброускорений при анализе плавности хода и вибраций электрооборудования).
3
Цель изобретения - повьшение точности устройства путем использования цифровой фильтрации.
Поставленная цель дсм;тигается тем, что. в устройство для контроля работы транспортного средства, содержащее датчик, выход которого через первый усилитель соединен с входом частотного фильтра, второй усилитель, выход которого подключен к первому входу аналого-цифрового преобразователя, выход которого соединен с первым входом блока управления, первый выход которого подключен к второму вхрду аналого-щ1фрового преобразователя, генератор импульсов, выход которого соединен с BTOpbiM входомблока управления, второй выход которого подключен к первому входу второго усилителя, третий выход блока управления соединен с первым входом программного блока, выход которого подключен к первому входу арифметического блока, первый выход которого соединен с входом блока индикации, введены . регистр сдвига, блок цифровой фильтрации и квадратор, выход которого соединен с вторым входом арифметического блока, второй выход которого подключен к второму входу прог- раммного блока, выход аналого-цифрового преобразователя соединен с первым входом регистра сдвига, выход которого подключен к первому входу блока цифровой фильтрации, выход которого соединен с входом квадратора, выход частотного фильтра подключен к второму входу второго усилителя, четвертый и пятый выходы блока управления соединены с вторыми входами соответственно блка цифровой фильтрации и регистра
сдвига. I
Кроме того, блок управления содежит переключатели, блок элементов задержки, делнтахш частоты, элементы задержки, реверсивный счетчик, источникопорного напряжения, элемент И и элемент ИЛИ, объединенные информационные входы последних являются первым входом блока управления вторым входом которого явля,ется первый вход первого переключателя, выход которого соединен с входом делителя частоты, первый выход которого через первый элемент задержки подключен к управляющим входам эле230424
мента И и элемента ИЛИ, выходы которых соединены с входами реверсивного счетчика, выходы которого подключены к входам блока элементов задерж5 ки и являются вторым выходом блока управления, пятым выходом которого являются выходы блока элементов задержки, первый выход делителя частоты соединен с входом второго эле10 мента задержки и является первым выходом блока управления, второй . выход делителя частоты подключен к входам третьего и четвертого элементов задержки, к первому входу второ15 го переключателя подключен первый выход источника опорного напряжения, второй выход которого соединен с вторыми входами переключателей, выходы третьего элемента задержки
0 и переключателей являются третьим выходом блока управления, четвертым выходом которого являются выходы второго и четвертого элементов задержки.
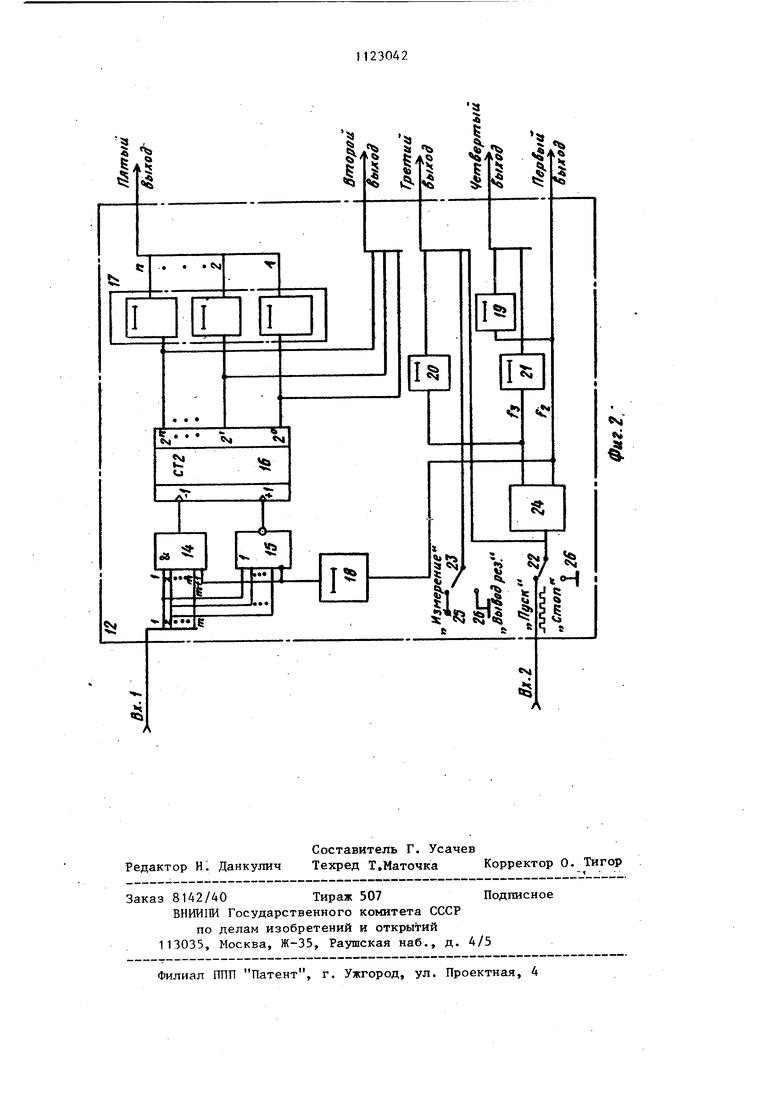
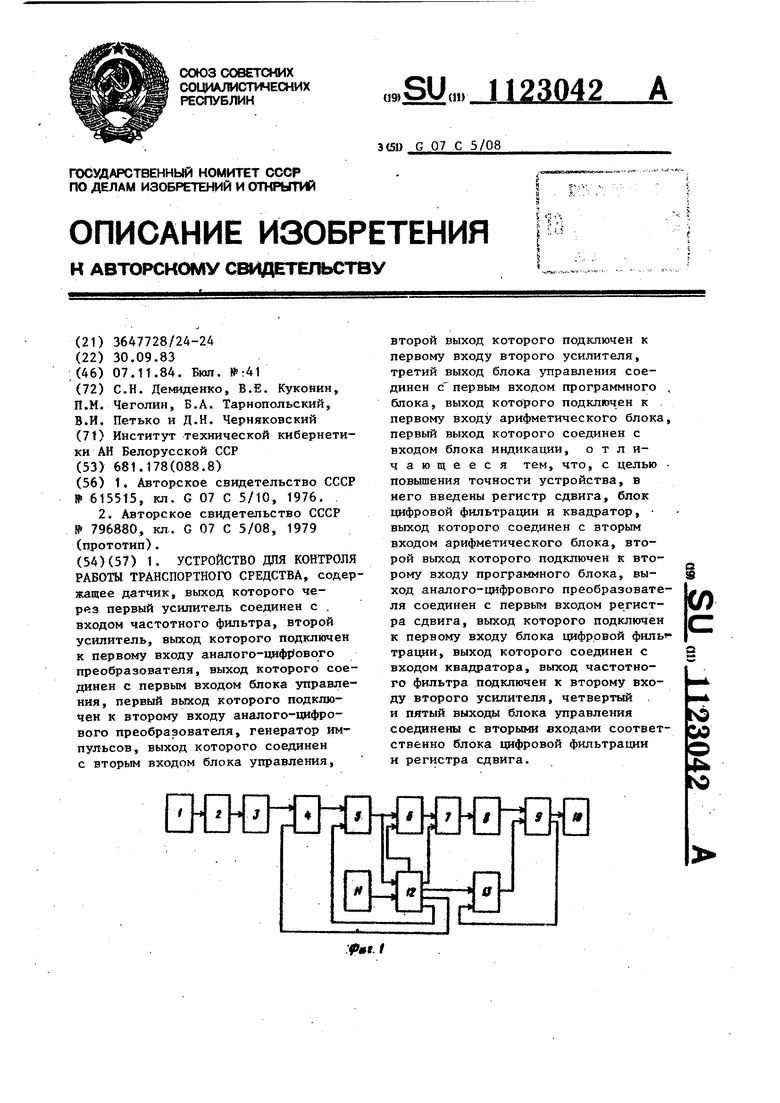
5 На фиг. 1 приведена блок-схема устройства; на фиг. 2 - функциональная схема выполнения блока управления.
Устройство содержит датчик 1,
0 первый усилитель 2, частотный фильтр 3 для фильтрации нижних частот, второй усилитель 4, аналого-цифровой преобразователь 5, регистр 6 . сдвига, блок 7 цифровой фильтрации,J квадратор 8, арифметический блок 9, блок 10 индикации, генератор 11 импульсов, блок 12 управления, програьданый блок 13.
Блок 12 управления содержит эле0 мент И 14, элемент ИЛИ 15, реверсивный счетчик 16, блок 17 элементов задержки, элементы 18-21 задержки, первый 22 и второй 23 переключатели, делитель 24 частоты и источник опор5 ного напряжения с выводами 25 и 26. На выводе 25 действует напряжение логической единицы, а вывод 26 заземлен и имеет напряжение, соответствующее логическому нулю.
0 Регистр 6 сдвига предназначен для восстановления истинной величины поступаннцих чисел и может быть выполнен в виде комбинационной схемы мультиплексора.
производить фильтрацию исследуемого процесса в нескольких частотных полосах. Примерами такого блока могут служить устройство для цифровой фильтрации и цифровые фильтры с мультиплексированием.
реализация квадратора 8 может быть выполнена, например, в виде комбинационной схемы по известным для квадратора соотношениям. Это может быть также схема постоянного запоминающего устройства, в котором преобразуемое число поступает на вход регистра адреса, по которому записана информация, являющаяся квадратом входной величины и др.
В качестве арифметического блока 9 могут использоваться интегральные центральные процессорные злементы одной из выпускаемых серий микропроцессорных комплектов.
Блок 12 управления предназначен. для синхронизации и управления рабо той и взаимодействием блоком устройства и функционирует по жесткому алгоритму.
Программный блок 13 представляет собой запоминающее устройство со схемой формирования следующего адреса, исполненное, например, на основе программируемой пользователем постоянной памяти и интегральных схем средней степени интеграции. Устройство работает следующим образом.
При проведении испытаний аналоговый сигнал с выхода датчика 1 поступает на вход первого усилителя 2, где происходит его предварительное усиление. Затем усилинный сигнал поступает на вход частотного фильтра 3 (фильтра предварительт ной выборки). Этот ограничивает спектр входного сигнала, что необходимо для преобразования сигнала в цифровую форму без искажений вызьшаемых эффектом наложения. Ограниченный по частоте сигнал поступает на второй усилитель А. На втором усилителе 4 блок 12 управления устанавливает наибольший коэффициен усиления, при котором напряжение на выходе второго усилителя 4 не превышает по абсолютной величине наибольшего значения сигнала, преобразуемого аналого-цифровым преобразователе 5, Коэффициент усиления второго усилителя 4 выбирается из чисел ряда
2, где п о; ±1; +2 и т.д. Частота работы аналого-цифрового преобраз вателя 5, включенного последовательно с усилителем 4, в соответствии с теоремой отсчетов превышает максимальную частоту на выходе фильтра 3 более, чем в два .раза.
Цифровой код с выхода аналогоцифрового преобразователя 5 поступает на вход регистра 6 сдвига и на вход блока 12 управления. Если цифровой код на выходе аналого-цифрового преобразователя 5 превышает верхнюю пороговую величину, заданную в блоке 12 управления, что говорит о слишком большой величине сигнала на выходе второго усилителя 4, то блок
12вырабатывает сигнал, по которому уменьшается величина козффициен:та усиления во втором усилителе 4. Аналогичным образом производится увеличение коэффициента усиления при величине цифрового кода на выходе аналого-цифрового преобразователя
5, меньшей установленного нижнего порогового значения, заданного в блоке 12. Таким образом, поддерживается оптимальный уровень сигнала на входе аналого-цифрового преобразователя 5. Код текущего значения козффи191ента усиления второго усилителя из блока 12 поступает в регистр 6 сдвига, который производит соответствующий сдвиг поступающего из аналого-цифрового преобразователя 5 числа. Тем самым производится восстановление исходного сигнала, который был искажен за счет усиления вторым усилителем 4. Сигнал с выхода регистра 6 сдвига постзшает на вход блока 7 цифровой фильтрации, который ос5пцествляет фильтрацию в требуемых частотных диапазонах. Отфильтрованные составляющие с выхода блока 7 цифровой фильтрации последовательно поступают на вход квадратора 8. С выхода квадратора 8 числа поступают на информационный вход арифметического блока 9. В последнем по командам программного блока
13производится обработка поступающей информации,
В программном блоке 13 хранится и в определенной последовательности вьщается программа, реализующая требуемый алгоритм обработки информащш.
Для определения в нескольких час тотных диапазонах одной из наиболее употребительных характеристик случайного сигнала - среднего квадратического отклонения, вычисляемой
ш.
из выражения ,
программа, хранимая в блоке 13 и, соответственно, вычисляемая арифметическим блоком 9, включает такие операции, как накопление поступающих с выхода квадратора 8 отсчетов
2 х в регистрах общего назначения
блока 9, соответствующих анализируемым частотным диапазонам, деление на число отсчетов N по каждому диапзону, извлечение квадратного корня по каждому диапазонуi
Результаты обработки по каждому частотному каналу заносятся во внутренние регистры общего назначения блока 9. Вывод результатов измерений осуществляется поканально, для чего производится подача соответствующих сигналов из блока 12 управления в программный блок 13, который управляет вьтодом информации из регистров общего назначения блока 9 на блок индикации 10. Генератор 11 импульсов (таймер) посылает в блок 12 импульсные отметки времени и определяет продолжительность проведения измерения и, соответственно, число дискретных отсчетов измерений величины, которое используется при усреднении, в процессе обработки результатов измерения.
Функционирование блока 12 управления происходит следующим образом. Переключатель 23 устанавливается в положение Измерение, обеспечивающее на шину потенциала логической единицы. При включеннии режима Пуск переключателем 22 из генератора 11 импульсов (таймера) через второй вход блока 12 начинает поступать и1-тульсная последовательность частоты fJ . Импульсная последовательность подается на вход делителя 24 частоты и на третью шину магистрали с третьего выхода блока 12, который идет к программному блоку 13.
С первого выхода делителя 24 частоты импульсная последовательность частоты f-j поступает через шину первого выхода на анапого -цифровой
преобразователь 5, синхронизируя выдачу с его выхода числового значения сигнала, в схему регулировки усиления на (т + 1)-е входы элементов И 14 и ИЛИ 15 и через элемент 19 задержки на шину четвертого выхода. Со второго выхода делителя 24 импульсы с частотой f поступают через соответствующие элементы 20 и 21 задержки ,к магистралям третьего и четвертого выходов, подключаемым к программному блоку 13 и блоку 7 цифровой фильтрации. Величины задержек элементов 19 и 20 выбраны таким образом, чтобы синхронизировать выполнение операций соответствующими блоками устройства к моменту поступления очередного отсчета на их вход. Импульсы частоты ff поступают, кроме того, к программному блоку 13 через шину третьего выхода, инициируя в последнем смену адресов в регистре адреса и вьщачу последовательности микрокоманд и синхросигналов, определяющих обработку информации в блоке 9. Коэффициент деления частоты k{ равен максимальному числу команд, которые должны быть исполнены в блоке 9 над поступившим отсчетом входной величины до прихода следующего, а отношение k2 fa равно числу импульсных синх- росигналов, необходимых для получения с выхода блока 7 отсчетов отфильтрованных составляющих во всех диапазонах анализа для одного дискретного входного значения.
По окончании режима измерения переключатель 22 устанавливается в режим Стоп, и поступление импульсной последовательности частоты f в блок 12 прекращается. Затем производится ВЫВ01Д результатов измерения на индикацию. Для этого переключатель 23 устанавливается в положение Вывод результатов, что приводит к понижению уровня на шине третьего выхода и вновь переключателем 22 задается режим ПУСК. В данном случае программный блок 13 генерирует на блок 9 серию микрокоманд вывода нформации. По окончании вывода на переключателе 22 задается режим СТОП и устройство готово к выполнению нового этапа измерений.
Управление коэффициентом усиления торого усилителя 4 происходит слеукяцим образом. Значения/тг старших разрядов числевого кода с выхода преобразовател 5 через первый вход прстз ает на многовходовые элементы И 1А и ИЛИ 1 Если значения этих разрядов равны единице, что говорит о приближении величины сигнала к верхней границе динамического диапазона преобразова ля 5, то очередной импульс, поступающий с выхода элемента 20 задержки на Щ + 1-й вход элемента И 14, будет пропущен элементом и, поступив на вход вычитания счетчика 16, уменьшит значение, зафиксированное в нем на единицу. Уменьшенный код с выходов счетчика 16 через второй выход поступит в усилитель 4 и вызо вет в нем уменьшение коэффициента усиления. Аналогичном образом происз одит увеличение коэффициента уси ления второго усилителя 4, если код числа на вьпсоДе преобразователя 5 содержит ноль в старших разрядах, т.е. если сигнал имеет слишком малую величину. Код коэффициента усиления с выхода счетчика 16 поступает кроме того через блок 17 элементов задержки в магистраль пятого выхода, задавая регистру 6 сдвига количество сдвигов,. которые надо выполнить над отсчетом сигнала с выхода преобразователя 5 для восстановления истинного значения числа. Введение блока цифровой фильтрации позволяет снизить погрешность устройства, а использование аппаратного квадратора более чем на порядок сокращает длительность операции возведения числа в Квадрат. Последнее объясняется тем, что в микропроцессоре возведение в квадрат осуществляется по микропрограмме, включающей несколько десятков микрокоманд, а в квадраторе эта операция осуществляется аппаратурно за один такт. Кроме того, введение связи от операционного блока к второму входу программного блока позволяет организовать условные переходы в программах обработки, что делает программное обеспечение более гибким и простым, дает возможность реализовать более сложные алгоритмы и, в конечном счете, расширять функциональные возможности устройства. По предварительным оценкам применение устройства позволит снизить затраты на получение одного измеряемого параметра.
frsi (N
€
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля и регистрации показателей работы транспортных средств | 1976 |
|
SU615515A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля работыТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU796880A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
