1
Изобретени относится к измерительной технике и может быть использовано для экспресс-анализа процессов, протекающих в узлах и деталях транспортного средства во время дорожных или стендовых испытаний а также в лабораторных условиях для обработки информации, зарегистрированной на магнитных носителях.
Известны бортовые устройства для контроля и регистрации показателей работы транспортных средств, позволяющие измерять дисперсию случайного процесса в пяти частотных плосах .и содержащие датчик, тензоусилитель, полосовой фильтр, усилитель , блок преобразования, элемент И, индикатЪр, блок формирования и преобразования сигналов времени l.
Недостатками указанных устройств являются необходимость проведения дополнительных вычислений, невысокая точность и малое быстродействие .
Известно также устройство для контроля работы транспортных средст содержащее датчик, выход которого через первый усилитель подключей ко входам полосовых фильтров, коммутатор, второй усилитель, генератор импульсов и блок индикации (2.
Работа с этим устройством проводится в три равных по длительности этапа: предварительный заезд, тарировка и измерение . На первом этапе устанавливают необходимые коэффициенты усиления тензоусилителя и полосовых усилителей и регистри0руют с помощью генератора импульсов время движения транспортного средства} на втором этапе при выбранных режимах работы тенэоусилителя и полосовых усилителей произ5водят тарировку всего тракта, т.е. регистрацию известного сигнала в течение времени, равного времени предварительного заезда} на третьем этапе производят измерение и обра0ботку. Таким образом, при работе с известным устройством две трети рабочего времени затрачивается на определение оптимальных режимов функционирования отдельных узлов
5 устройства,.регистрацию времени заезда и нахождение тарировочных .коэффициентов, а только одна третв собственно на измерение. Кроме того,так как при измерении дисперсии
0 лчастота следование импульсов на блока преобразования пропорциональна квадрату величины измеряемого сигнала, при большом динамическом диапазоне входного сигнала в блоке преобразования возникают значительные погрешности, связанные с трудностью достижения линейности передаточной характеристики данного блока во всем входном диапазоне . Другим источником погрешности является используемый в известном устройстве метод деления, позволяющий производить деление только нецело.
Цель изобретения - сокращение времени проведения испыта ний и увеличение точности измерений.
Поставленная цель достигается тем что в устройство для контроля работы транспортных средств, содержащее датчик, выход которого через первый усилитель подключен ко входам полосовых фильтров, коммутатор, второй усилитель, генератор импульсов и бло индикаций, введены аналого-цифровой преобразователь, микропроцессор, программный блок и блок управления, выходы полосовых фильтров подключены ко входам коммутатора, выход которого через второй усилитель соединен с первым входом аналого-цифрового преобразователя, выход которого подключен к первым входам микропроцессора и блока управления, второй вход которого соединен с выходом генератора импульсов, первый выход блока управленя подключён через программны блок ко второму входу микропроцессора, выход которого соединен с блоком индикации, второй,, третий и четвертый выходы блока управления подключены соответственно к управляющим входам коммутатора, второго усилителя и аналого-цифрового преобразователя .
Введение в устройство обратной связи между аналого-цифровым преобразователем и усилителем через блок управления позволяет автоматически выбрать режим работы устройства, что исключает необходимость проведения перед каждым измерением предварительного заезда и уменьшает погрешность измерений при большом динамическом диапазоне сигнала. Действительно , блок управления и синхронизации управляет изменением коэффициента усиления усилителя, в зависимости от величины сигнала на выходе аналого-цифрового преобразователя. Введенный блок управления учитывает в микропроцессорном блоке изменение коэффициентов усиления усилителя одновременно с обработкой и регистрацией, что исключает необходимость проведения тарировки перед каждым измерением. Микропроцессор с блоком микропрограмм обеспечивает требуемую точность вычислений иско,мых параметров, сравнимую с точнос1ью аналого-цифрового преобразователя.
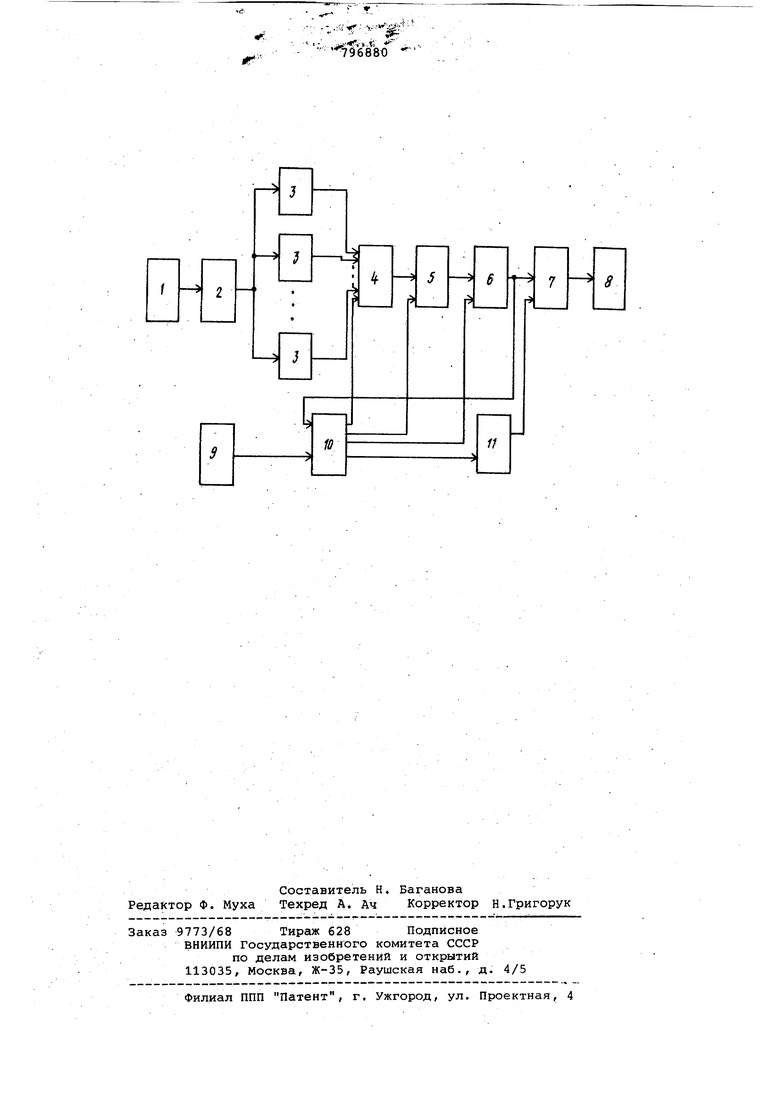
На чертеже представлена блок-схема устройства для контроля работы транспортного средства.
Оно содержит датчик 1, первый усилитель 2, полосовые фильтры 3, коммутатор 4, второй усилитель 5, аналого-цифровой преобразователь б, микропроцессор 7, блок 8 индикации, генератор 9 импульсов, блок 10 управления, программный блок 11. Датчик 1 соединен с первым усилителем 2, выхо которого подключен к полосовым фильтрам 3, связанным через коммутатор
4со вторым усилителем 5, выход которого подан на аналого-цифровой преобразователь 6, выход аналого-цифрового преобразователя б соединен
с информационным входом микропроцессора 7, к входу управления которого, подключен выход программного блока 11, а выход микропроцессора 7 заведе на блок 8 индикации. Генератор 9 импульсов соединен с блоком 10 управления , выходы которого связаны с коммутатором 4, вторым усилителем 5, аналого-цифровым преобразователем 6 и программным блоком 11.
Устройство работает следующим образом.
При проведении испытаний аналоговый сигнал с выхода датчика 1 поступает на вход первого усилителя 2, где происходит его предварительное усиление. Затем усиленный сигнал поступает на входы полосовых фильтров 2. По сигналам, приходящим из блока 10 управления, отфильтрованные составляющие поочередно подаются коммутатором 4 на вход второго усилителя 5. На втором усилителе
5блок 10 управления устанавливает наибольший коэффициент усиления, при котором напряжение на выходе второго усилителя -5 не превышает по абсолютной величине наибольшего значения сигнала, преобразуемого аналого-цифровым преобразователем б. Коэффициент усиления второго усилителя 5 выбирается из чисел ряда 2,где п - О, ±1/ ±2 и т.д. Частота работы аналого-цифрового преобразователя 6 соответствует частоте работы коммутатора 4, включенного для реализации принципа временного разделения каналов, и определяется выражением:
Vi.MCKpeT wax пер
де f,
максимальная частота спектmanра исследуемого сигнала; количество частотных каналов;
число отсчетов на период .
персигнала, необходимое для остаточно полного его отражения.
Цифровой код с выхода анало-цифрвого преобразователя б поступает в микропроцессор 7 и блок 10 управления. Если цифровой код на выходе аналого-цифрового .преобразователя; б превышает верхнюю пороговую величину, заданную в блоке 10 управления , что говорит о слишком большой величине сигнала на выходе второго усилителя 5, то блок 10 вырабатывает сигнал, по которому уменьшается величина коэффициента усиления во втором усилителе 5. Аналогичным образом производится увеличение коэффициента усиления при величине цифрового кода на выходе аналогоцифрового преобразователя б, меньшей установленного нижнего порогового значения, заданного в блоке 10. Таким образом, поддерживается оптимальный уровень сигнала на входе аналого-цифрового преобразователя 6. Код текущего значения коэффициента усиления второго усилителя 5 из блока 10 управления поступает в программный блок 11, который производит соответствующий сдвиг поступающего из аналого-цифрового преобразователя 6 числа в микропроцессор 7. В микропроцессоре 7 по командам программного блока 11 производится обработка поступающей информации. Блок 10 управления посылает в программный блок 11 сигналы, делающие номер частотного канала,которому принадлежит пришедшее в микропроцессор 7 число. Результаты обработки по каждому частотному канал заносятся во внутренние регистры общего назначения микропроцессора 7 Вывод результатов измерений осуществляется поканально, производится подсчет сигнала из блока 10 управления в программный блок 11,.который управляет выводом информации из соответствующего регистра общего назначения микропроцессора 7 на бло индикации 8. Генератор импульсов 9 определяет время проведения измерения и, соответственно,, число дискретных отсчетов измеряемой величины которое используется при усреднении в процессе обработки результатов измерения.
При использовании устройства вре мя, необходимое для получения резултата, сокращает :я примерно в 3 раза по сравнению спрототипом, так как
исключается предварительный заезд, а тарировка может проводиться лишь один раз за весь цикл измерений, В 2 раза сокращается расход моторесурсов транспортного средства,так как при работе с известным устройством требовалось совершать два заезда - предварительный и измерительный (тарировка производилась при неподвижном транспортном средстве), а работа с предлагаемым устройством
0 требует лишь измерительного заезда. Повышается точность преобразования, особенно при большом динамическом диапазоне входного сигнала.
15
Формула изобретения
Устройство для контроля работы транспортных средств, содержащее датчик, выход которого через первый
0 усилитель подключен ко входам полосовых фильтров, коммутатор, второй усилитель, генератор импульсов и блок индикации, отличающееся тем, что, с целью повышения
5 точности и быстродействия устройства, в него введены айалого-цифровой преобразователь, микропроцессор, программный блок и блок управления, выходы полосовых фильтров подключены
0 ко входам коммутатора, выход которого через второй усилитель соединен с первым входом аналого-цифрового преобразователя, выход которого подключен к первым входам микропроцесsсора и блока управления, второй вход которого соединен с выходом генератора импульсов, первый выход блока управления подключен через программный блок ко второму входу микропро0цессора, выход которого соединен с блоком индикации, второй третий и четвертый выходы блока управления подключены соответственно к управлякщим входам коммутатора, второго усилителя и аналого-цифрового пре5образователя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
0 по заявке № 2347609/24,
кл. G 07 С 5/10, 26.01.77.
2.Авторское свидетельство СССР по заявке № 2716059/18-24,
кл. G 07 С 5/08, 19.01.79 (прототип).
.; .-...
. 1 .Ч | .
- 9688С 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы транспортных средств | 1982 |
|
SU1045240A1 |
| Устройство для контроля работы транспортных средств | 1980 |
|
SU892457A2 |
| Устройство для контроля работы транспортного средства | 1983 |
|
SU1123042A1 |
| Устройство для контроля работы транспортных средств | 1979 |
|
SU781858A1 |
| Устройство для контроля работы транспортных средств | 1980 |
|
SU883944A1 |
| Устройство для контроля работыТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU809267A1 |
| Устройство для измерения интермодуляционных искажений | 1990 |
|
SU1798725A1 |
| Устройство для контроля работы транспортных средств | 1977 |
|
SU693407A1 |
| АППАРАТ ДЛЯ ДИАГНОСТИКИ И ЛЕЧЕНИЯ НЕЙРОСЕНСОРНОЙ ТУГОУХОСТИ | 2013 |
|
RU2535405C1 |
| Многоканальный измерительный преобразователь на несущей частоте с встроенным цифровым синхронным детектором | 2016 |
|
RU2618727C1 |