Изобретение относится к функциональным схемам устройств для ограни чения крутящего момента (КМ) на шпи деле перейбсных резьбозавертывающих устройств с пневмоприводому которые целесообразно использовать при осна щении гайковертов, предназначенных для обеспечения затяжки болтовых с динений с заданным Ш в изделиях транспортного машиностроения. Потребность в ограничителях КМ предлагаемого типа обусловлена тем что прекращение процесс завертыва ния, производимое отключением подводимой к пневмоприводу энергии в момент достижения, на шпинделе задан ной величины КМ, не обеспечивает требуемой точности управления. Это обусловлено тем, что в известных ограничителях КМ выбор момента отключения энергии,, подводимой к пнев моприводу, производится без учета величины кинетической энергии, накопленной во вращающихся узлах резь бозавертывающих устройств в процессе завертьгеания, В результате., после отключения подводимой энергии за счет накопленной кинетической энергии происходит дозакручивание резьбового соединения. При этом окончательная величина КМ превышает заданную, при которой производилось отключение, причем, чем меньше диаметры болтов и жестче конструк1Щя, тем большей величины достигает эта разница. Отклонение реальной величины КМ от заданной уменьшает долговечность конструкции. Управление процессами затяжки болтовых соединений наиболее точно обеспечивается электронными прибор ми. При этом процессы управления базируются на использовании информациио текущих значениях КМ, углов поворота гаек, производных КМ по углу, поворота и других, а в процессы управления входит регулирование скорости вращения шпинделей гайковертов ij . Такие устройства обеспечивают высокую точность управления, но сложны по конструкции и требуют как усложненной конструкции гайковертов так и при использовании пневматической энергии автономных регулируе мых блоков подготовки воздуха для каждого гайковерта. Поэтому применение их экономически оправдано и технически выполнимо для стационарных и полустационарных гайковертов. Известно устройство для ограничения КМ гайковерта, содержащее дви- . гатель, ишиндели и электромагнитные муфты jofla подключения шпинделя к двигателю. Устройство, управляющее муфтами, имеет датчик крутящего мшента, блок питания, сравнивающий блок, триггеры, генератор импульсов, двоичный счетчик импульсов, дешифратор, двоичный счетчик, транзисторные ключи, две группы двухвходовых , количество к6торых в группе равно количеству шпинделейГ2/ . Однако данное устройство обеспечивает невысокую точность получения заданного КМ при изменении видов стягиваемых конструкций, так как в управлении не учитывается влияние кинетической энергии-, накопленной в инерционных массах в действующей на болтовое соединение уже после отключения привода. Наиболее бхгазким к изобретению является устройство для ограничения Крутящего гайковерта, содержащее управляемый клапан, привод, узел датчика, а устройство управления КМ содержит формирователь сигнала датчика, узел вырабатывающий сигнал заданной величины КМ, схему сравнения и узел включения управляемого клапана. Датчик вьфабатывает сигнал, пропорциональный КМ, развиваемому на шпинделе гайковерта. Этот сигнал сравнивается с сигналом, пропорциональным заданному КМ и при их равенстве происходит отключение сжатого воздуха, поступающего на привод через управляемьй клапан з . Известный гайковерт прост по конструкции, но обеспечивает невысокую точность ограничения крутящего момента. Связано это с тем, что процесс управления производится в наиболее удобном сечении гайковерта (в месте подвода энергии в привод). Но в процессе затягивания болтового соединения во вращающихся массах привода, датчика, шпинделя накапливается кинетическая энергия, которая при отключении управляемого клапана затрачивается на дотягивание гайки, т.е. реальный момент затяжки выгае заданного. Для уменьшения это3t
го эффекта известный гайковерт должен применяться лишь при стягивании конструкций мягкого ипа, что сужает его область применения.
Целью изобретения является повышение точности устройства.
Указанная цель достигается тем, что в устройс- во для регулирования крутящего момента гайковерта, содержащее датчики частоты вращения шпинделя и текущего значения крутящего момента гайковерта, подключенные соответственно к входам первого и второго блоков умножения на постоянные коэффициенты, последовательно соединенные элемент сравнения, исполнительный элемент и регулирующий клапан, установленный на линии подачи воздуха к приводу шпинделя, введены последовательно соединенные дифференциа тор, блок перемножения, сумматор, усилитель и квадратор, а также источник опорного напряжения, подключенный к второму входу сумматора, к третьему входу которого подключен выход квадратора, входом соединенного с первым входом элемента сравнения, вторым входом соединенного с выходом второго блока умножения на постоянный коэффициент , подключенным к входу дифференциатора, причем выход первого блока умножения на постоянный коэффициент подключен к второму входу блока перемножения.
Введение в схему перечисленньпс узлов и связей между ними позволяет определить момент отключения гайковерта с учетом запаса кинетической энергии на вращакицихся его узлах.
На гайковерт поступает воздух под давлением. Пройдя через регулирующий клапан 1, он приводит во вращение привод 2, связанный через датчик 3 текущего значения КМ гайковерта и датчик 4 частоты вращения
шпинделя со шпинделем гайковерта. I
Гайковерт управляется устройством, содержащим блоки 5 и 6 умножения на постоянный коэффициент, входы которых соединены с выходами датчиков 4 и 3 соответственно, выход блока 6 умножения подключен параллельно к входам элемента 7 сравнения и дифференциатора 8, с которым последовательно соединены блок 9 перемножения, сумматор 10, усилитель 11, квадратор 12. Выход квадра6084
тора 12 соединен с третьим входом сумматора 10, к второму входу которого подсоединен источник 13 опорного напряжения.
Вход квадратора 12 дополнительно соединен с другим входом элемен та 7 сравнения. Выход элемента 7
сравнения соединен через исполнительный элемент 14 с регулирующим
клапаном 1.
Вход 15 служит для подачи команды начала работы, вход 16 - для ввода задания величины Ш М, которую надо достичь в процессе работы. Вход
17 используется для 1вэрда в устройство постоянной величины У, численно равной моменту инерции вращающихся частей гайковерта, она изменяется, если устройство подключается к другому гайковерту.
Устройство работает следующим образом.
На вход 15 подается команда начала работы устройства и гайковерта.
При этом изменяется состояние исполнительного элемента 14, которое может быть вьтолнено в виде триггера с раздельными входами, и открывается регулирующий клапак 1, разре-
шая прохояздение сжатого воздуха на привод 2, приводящий во вращение шпиндель, соединенный с нагрузкой (гайкой затягиваемого болтового соединения) . Датчик 4 вырабатьгаает электрический сигнал, пропорциональный частоте вращения о шпинделя, а датчик 3 - сигнал, пропорциональный текущему значению КМ М, создаваемого гайковертом.
В аналитических выражениях, описываюш;нх сигналы на выходах узло.в устройства, опущены масштабные коэффициенты .
Сигналы на выходах блоков 5 и 6 умножения описываются выражениями
(1)
Uc yw.
б М
Пройдя через дифференциатор 8 и блок 9 перемножения, эти сигналы поступают на вход сумматора 10 в виде сигнала
i ll,.l|.(J- -.
I
Сигнал на выходе сумматора 10 описьшается выражением
dM
2
u,.,,, 91125 i nevUj| « М - сигнал, формируемый источником 13 опорного напряжения( U-J - сигнал на выходе квадратора 12. Сигнал и,о проходит через усилитель 11 с большим коэффициентом усидая К ы . Сигнал на выходе усилителя 1 г1М и„-М4ч- -ж Ч (4) Т4К каки, и , а - О, то UI.HW ,
Сигналы U и иj, поступают на вход элемента 7 сравнения, выполненного в виде суммирующего усилителя с больпвш коэффициентом усиления «К. Выходной сигнал элемента 7 сравнения при работе в линейной области описывается зависимостью
ifr.)(6)
/dMi
При малых величинах М -т-г- (режим
dt i
навинчивания гайки) сигнал U находится в ограничении и равен максимальному напряжению на выходе элемента 7 сравнения. В процессе затягивания болтового соединения величины t-jr возрастают, сигнал U выходит из ограничителя, зп еньшается до нуля и стремится изменить свой знак. При U| О изменяется состояние исполнительного элемента 14. При этом закрывается регулир укиций клапан 1 и привод 2 гайковерта отключается от магистрали сжатого воздуха. Новое включение гайковерта возможно после подачи по входу 15 новой команды на включение гайковерта .
Закрывание регулирующего клапана 1 происходит, когда момент N дости1015
M(t)
Мц + Stp (t),
(9)
где М ц - момент навинчивания гайки; 0(t) - угол, на который поворачивается гайка при затягивании болтового соединения, S - коэффициент пропорциональности, постоянный при затягивании болтового соединения. Он определяется из выражения (9) как
dM(i)
..iW| .
a-.-..-
dlfC-l) dl 6J (Jo dt(t . °
dt
dtf(.-t)
- . ..,
1&1нетическая энергия связана с KM выражением JT М. dqi , из которого можно определить угол дотягивания (f о„ гайки
fiwntfi
от ,t 1 )
4jwll (Wo S (fVcJc MO i 0.
Окончательный момент, с которым затянуто болтовое соединение, определяется выражением Mja. 5 t которое с учетом выражений (7), (10) и (11) имеет вид
М,
(12)
М.
Таким образом устройство за счет предварительного отключения регулирующего клапана 1 обеспечивает получение заданного момента затяжки. 8 гает величины Мо , при этом cj 1М «JM jf/lo с момеит о и df времени отключения №,. (7) При. этом во вращающихся частях гайковерта накапливается кинетическая энергия, описьгааемая вьфажением T«2-tj-u Эта энергия тратится на дотягивание гайки. Изменение КМ во время затягивания гайки описывается зависимостью
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения крутящего момента гайковерта | 1984 |
|
SU1196812A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2057001C1 |
| Способ управления пневматическим гайковертом и устройство для его осуществления | 1990 |
|
SU1776554A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
| Устройство для контроля осевой силы затяжки | 1986 |
|
SU1325418A1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2012 |
|
RU2489251C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2057002C1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ УДАРНЫМ ГАЙКОВЕРТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2359810C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2147276C1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
УСТРОЙСТВО ДЛЯ PEmffilPOBAНИЯ КРУТЯЩЕГО МШЕНТА ГАЙКОВЕРТА, содержащее датчики частоты вращения шпинделя и текущего значения крутящего момента гайковерта подключенные соответственно к входам первого и второго блоков умножения на постоянные коэффициенты, последовательно соединенные элемент сравнения, исполнительный элемент и регулирующий клапан, установленный на линии подачи воздуха к приводу шпинделя, отличающееся тем, что, с целью повышения точности устройства, в него введены последовательно соединенные дифференциатор, блок перемножения , суьматор, усилитель и квадратор, а также источник опорного Напряжения, подключенный к второму входу сумматора, к третьему входу которого подключен выход квадратора, входом соединенного с первым входом элемента сравнения, вторым входом соединенного с выходом второ- § г6 блока умножения на постоянный (Л коэффициент, подключенным к входу дифференциатора, причем выход первого блока умножения на постоянный коэффициент подключен к рторому входу блока перемножения.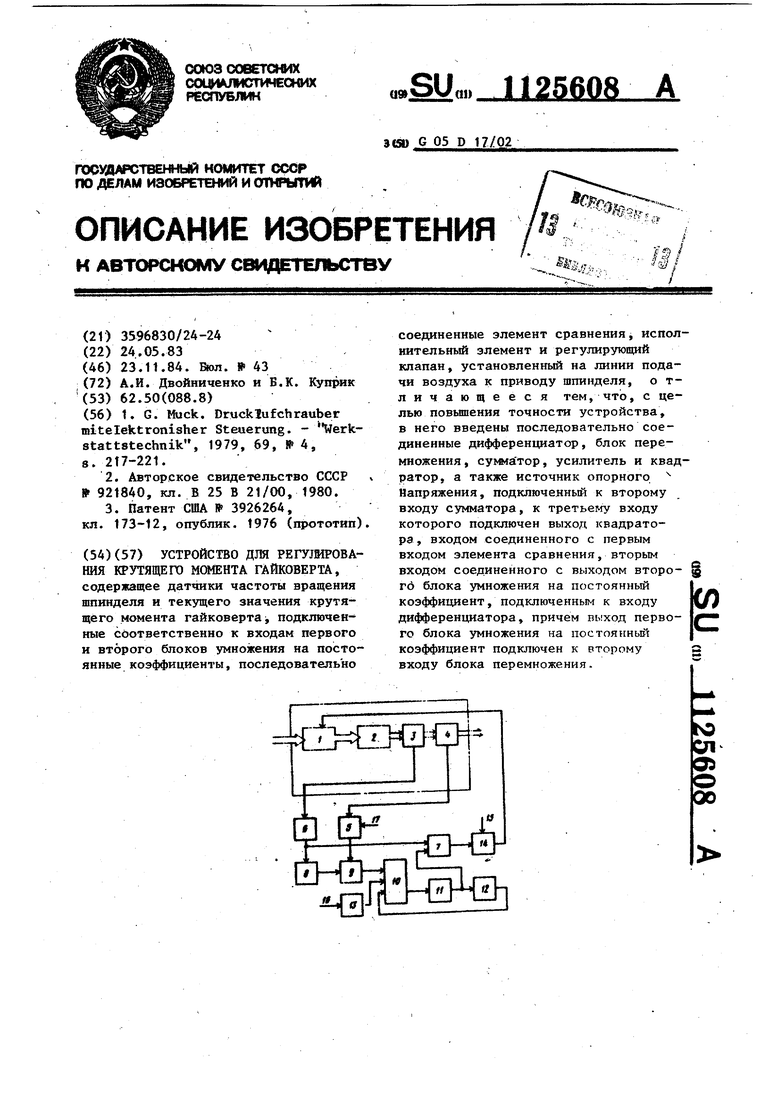
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| G | |||
| Muck | |||
| Drucklufchrauber mltelektronisher Steuerung | |||
| - Werkstattstechnik, 1979, 69, 4, 8.217-221 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Джино-прядильная машина | 1922 |
|
SU173A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
