датчик J .се.1, сй и« pec i.-i. Поддержание в неькстрен.ной ситуации безопасной дистанции осуществляется подсистемой с однонаправленным спожонпе. путем расчета в ч безопасной дистанции, сравнения ее в блоке 7 с действительной и подачи CMS нала рассогласования на исполнительный механизм разгона 8 или замедления 9 и сигнализатор 10, К подсистеме двунаправленного слежения кооме датчиков относятся блок 12 оптимального замедления автомобиля, контроллер 11 экстренного режима i коммутатор 13. При движении в блоке 1 пепреоывно по величинам скоростей всех трех автомобилей и дистанции до следующего сзади автомобили рассчитывается оптимальное замедление, при котором обеспечивается минимальная тяжесть последствий столкновения авто.по- бителей в экстренной ситуации,. Это замедление реализуется лишь тогда, когда контроллер 11 по изменению скорости впереди идущего автомобиля определит превышение его замедления над пороговым значением м выработает сигнал управления коммутатором 13, который пропустит сигнал оптимального замедления на гиехэнизм 9 и сигнализатор 10. 6 ил,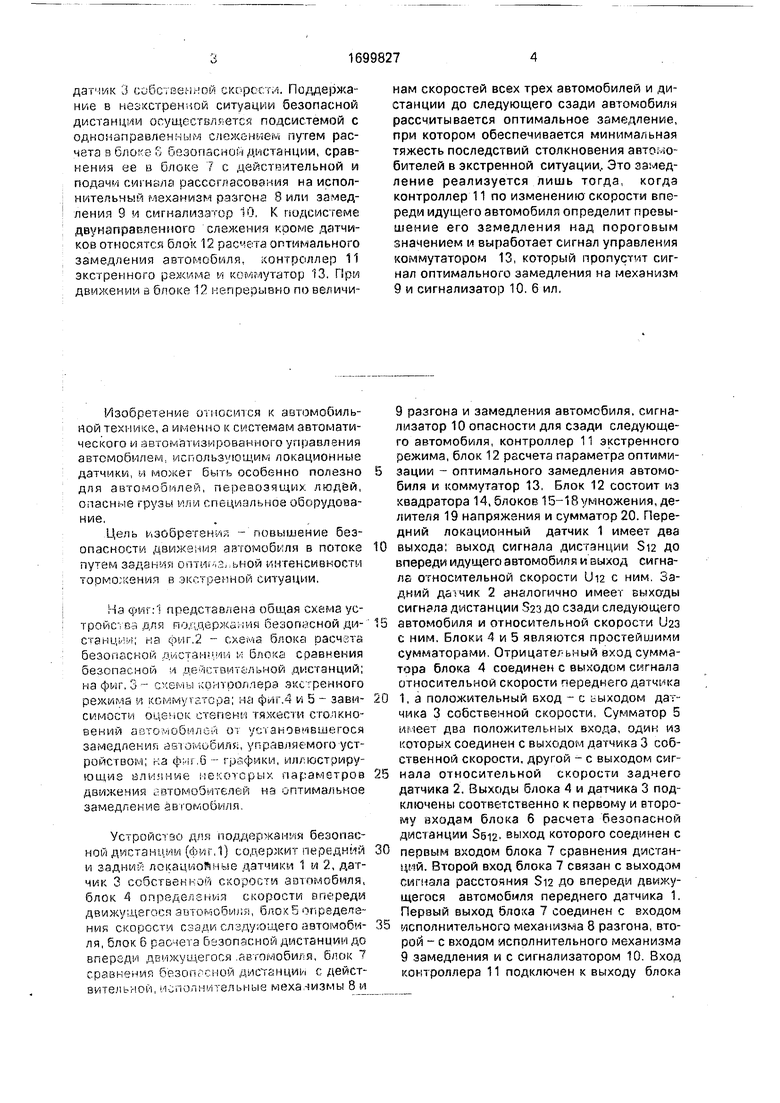
Изобретение относится к системам автоматизированного управления автомобилем с использованием локационных датчиков и особенно эффективно при управлении автомобилями, перевозящими людей, опасные грузы или специальное оборудование. Цель изобретения - повышение безопасности движения автомобиля в потоке путем задания оптимальной интенсивности торможения в экстренной ситуации. Устройство содержит передний и задний локационные датчики 1 и 2, фиксирующие расстояния и относительные скорости движения по отношению к переднему и заднему автомобилям, блоки 4 и 5 опредепения абсолютных скоростей этих автомобилей и о Ч
Изобретение о.моется к автомоОиль- нойтехии е, а именно к системам автоматического и -автоматизированного управления автомобилем не пользующим локационные датчики, л может быть особенно полезно для автомобилей, перевозящих людей, о.таснме грузы УЛИ специальное оборудование,
Цель изобретен ;, - повышение безопасности движз IMP автомобиля в потоке путем задан ля огти о, ы-юй интенсивности тормо (енит в зкг греиной ситуации.
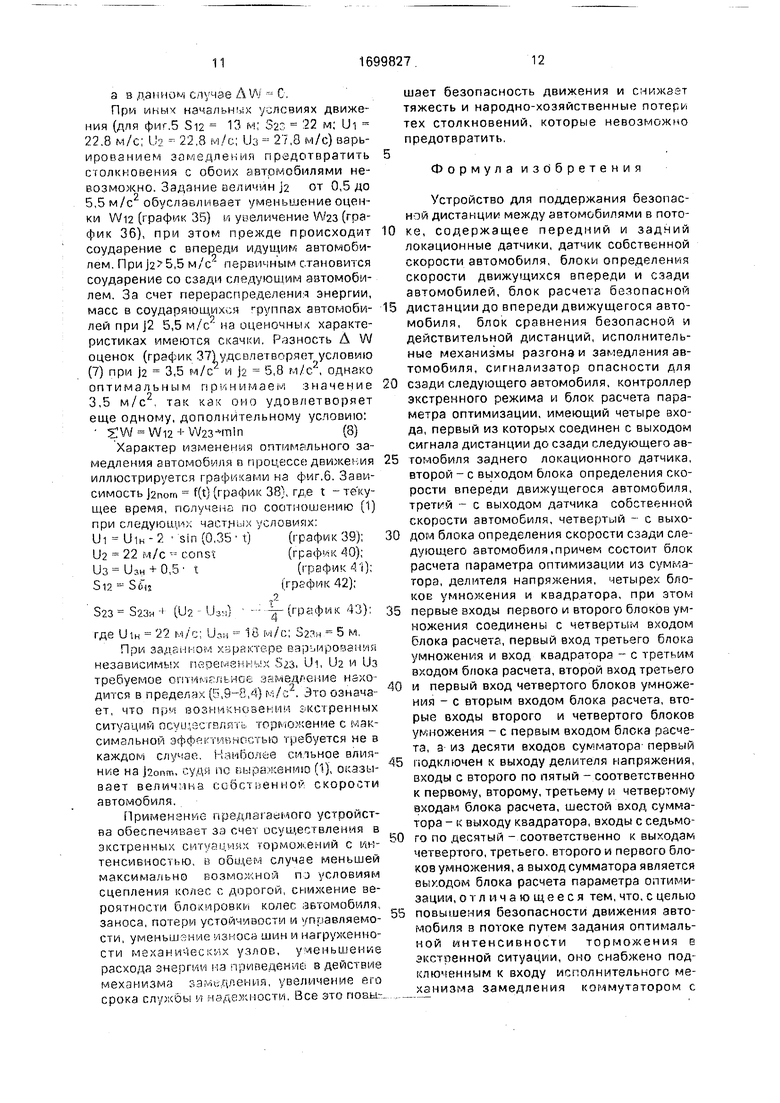
На фш предегавлена общая схема ус- тройс в-1 огя по, цьржим ш безопасной ди- сганц./ , на диг 2 - cxei-ia блока расчета безопасной листан ь- Блгча сравнения безопасной л пеЛстаитслоЧои дистанций; на фиг, о - 1ы uGrnoornepa экстренного режима и комм i с сера; ,а фиг 4 и Ь - зависимости оцгчок степени гяжесж столкновений а точоб 1л.; о-. у аное чвин-тося замедлен ил а зюи.ыЕгиля, управляемою устройством, а ф .г 6 ргфики, илгюстриру- ющйе ,е otcpux параметров движения ипго о5итьльй на птимальное замедление ав1омооиля
Устройство д.ч поддерхаи я безопасной дистанции (Лиг 1) содержит передний и за дни1 локаииоРыме датчики 1 и 2, датчик 3 собствен ой скорости аотпмсбиля, блок 4 onpe.uGjiSfiS in скорости впереди движу дегосч аьыр-оби;и, бло 5 Г|рвдепе- ния скорости с ади слзцу.ощего автомобиля, блок 6 paGie1 а бззопясной дистанции до впереди движущегося ае.пмобш я, блок 7 грзья-ениг, дистанции с дейст- витепьгюи исполнительные механизмы 8 и
9 разгона и замедления автомобиля, сигнализатор 10 опасности для сзади следующего автомобиля, контроллер 11 экстренного режима, блок 12 расчета параметра оптимизации - оптимального замедления автомобиля и коммутатор 13, Блок 12 состоит из квадратора 14, блоков 15-18 умножения, делителя 19 напряжения и сумматор 20. Передний локационный датчик 1 имеет два
выхода; выход сигнала дистанции 812 до впереди идущего автомобиля и выход сигнала относительной скорости Ui2 с ним Задний датчик 2 аналогично имев выходы сигнала дистанции S23AO сзади следующего
автомобиля и относительной скорости U23 с ним. Блоки 4 и 5 являются простейшими сумматорами Отрицательный вход сумматора блока 4 соединен с выходом сигнала относительной скорости переднего датчика
1, а положительный вход - с еыходом датчика 3 собственной скорости, Сумматор 5 tvseeT два попожительных входа, один из которых соединен с выходом датчика 3 собственной скорости, другой - с выходом сигнала относительной скорости заднего датчика 2, Выходы блока 4 и датчика 3 подключены соответственно к первому и второму входам блока 6 расчета безопасной дистанции 5б12- выход которого соединен с
первым входом блока 7 сравнения дистанций. Второй вход блока 7 связан с выходом сигнала расстояния Si2 до впереди движущегося автомобиля переднего датчика 1. Первый выход блока 7 соединен с входом
исполнительного механизма 8 разгона, второй - с входом исполнительного механизма 9 замедления и с сигнализатором 10 Вход контроллера 11 подключен к выходу блока
4 определения скорости впереди движущегося автомобиля. Четыре входа блока 12 расчета оптимального замедления (2onm автомобиля связаны по отдельности соответственно с выходом сигнала расстояния $23 до сзади следующего автомобиля датчика 2, с выходом блока 4 определения скорости Ui впереди движущегося автомобиля с выходом датчика 3 собственной скорости U2 автомобиля и с выходом блока 6 определения скорости из сзади следующего автомобиля.
Указанная совокупность параметров используется в блоке 12 для определения такого оптимального замедления автомобиля в экстренной ситуации, при котором обеспечивается равенство оценок степени тяжести возможных столкновений с движущимся впереди и сзади автомобилями в случае экстренного торможения переднего автомобиля и при соответствующей тормозной реакции операторов следующих за ним автомобилей, второй из которых оборудован предлагаемым устройством, а третий управляется водителем. Входными переменными для блока 12 являются $23, Ui. LJ2 и Уз, что является достаточным для определения по указанному выше критерию опта- мального замедления. поскольку принимаем, что при текущее регулировании обеспечивается поддержание безопасной дистанции и необходимая пятая переменная - расстояние Si2 определяется равенством Si2 Sei2. а безопасная дистанция характеризуется скоростями U, и 1)2. Выход блока 12 соединен с первым входом коммутатора 13, второй вход которого подключен к выходу контроллера 11, а выход связан с исполнительным механизмом 9 замедления автомобиля и сигнализатором 10. В блоке 12 вход квадратора 14 соединен с третьим входом (сигнал U) блока 12, первые входы блоког 5 и 16 умножения - с четвертым входом {сигнал Us) блока 12, второй вход блока 15 умножения и первый вход блока 17 умножения - с ретьик« входом блока 12. второй вход блока 17 и первый вход блока 18 умножения - с вторым входом блока 12 (сигнал Ui), вторые входы блоков 16 и 18 - с первым зходог i (сигнал 5зз) блока 12. Сумматор 20 имеет десять входов, первый из которых подключен к выходу делителя 19 напряжения входы с второго по пятый - соответственно к первому, второму, третьему и четвертому входам блока 12, шестой вход- к выходу квадратора 14, входы с седьмого по десятый - соответственно к выходам блоков 18, 17, 16 и 15 умножения. Выход сумматора 20 является
выходом блока 12 расчета оптимального за медленна. Такое устройство блока 12 обуславливается необходимостью обеспечение следующего соотношения между входными
и вы/одними сигналами:
- bo + bl $23 + Ь2 Ui - ЬЗ U2 - b
Us 15 U22 + be 823 Ui + by -S23 Us -L
bs
U2 + bg U2 Us, м/с.
0)
где коэффициенты равны:
Ьо--10.28;bi 0,038;
U2 -0,928;Ьз 1,643;
34 0,261;bs -0,0292;
06-0,0213;by -0,0292;
bt 0,0224;bg -0,0299.
Оценка дисперсии ошибок расчетов по соотношению (1) составляет 0,72 м2/с4 Выражение (1) справедливо для значений входных параметров в диапазонах
523 (5-25) м; Ui (10-25) м/с;
U (10-25) м/с; Уз (15-30) м/с и при коэффициенте сцепления колес с дорого - (f - 0,7
Соотношение (1) получено методом им 1тзционного моделирования параметров движения оассмэтриваемой i руппы лвтомо- бтей чр;ч экстренных торможениях с уче- том перерз пределения энергии при по ,ецэпзтельных столкновениях, а также с испслозораняем оптимизационной процедуры по критериям раьенсгва оценок сте- пэы столкновений. В исходных учтены следующие средне-статистические значения параметров быстродействия гоомозлых приводов при экстренных тормо-ке мях: чремя нар стзния замедле- Htfc. впереди движущегося аатомсбипя оаьго0.2 дремя запаздывание исполните. ,ъиого v,ex3HM3Ma зак.едления автомо- бм/ Я, ообрудованн гс предлагаемым У, поиететм, 0,3 с; время нарастания за медлсьияэтого автомобиля
Тн. - Т J2onm Jniax ,
где Тнггах - 0,3 с - время нарастания замедления при реализации максимально возможного по условиям сцепления колес с досогой замедления jmax -98 (f при ко- / сцепления - 0 7, время ре- зкцил водителя сзади следующего автомобиля 1,0 г; рремя запаздывания при- этого автомобиля 0 2 г, а время нара- стани/ замедления 0,2 с Коэффициенты передачи входов с первого по десятый сум- 20 соответственно оавнн Ь0 bi, b2, Ьз, b4, bs be, be b, by
Безопасьаи дистанциа 5ь«,; значение оторой рассчитывается в (ню-р 6 опредеяется следующим состчоа,
5б12 (ТС2 4 0,5 ГН2 ) М. +
2J2
1
2J1
VI 4- С .
(3)
где Tea время запаздывания автоматизированного исполнительного механизма замедления;
ГН2 время нарастания замедления;
J2 и ji установившиеся замедления автомобиля, оборудованного устройством, и впереди движущегося соответственно;
С - запас дистанции.
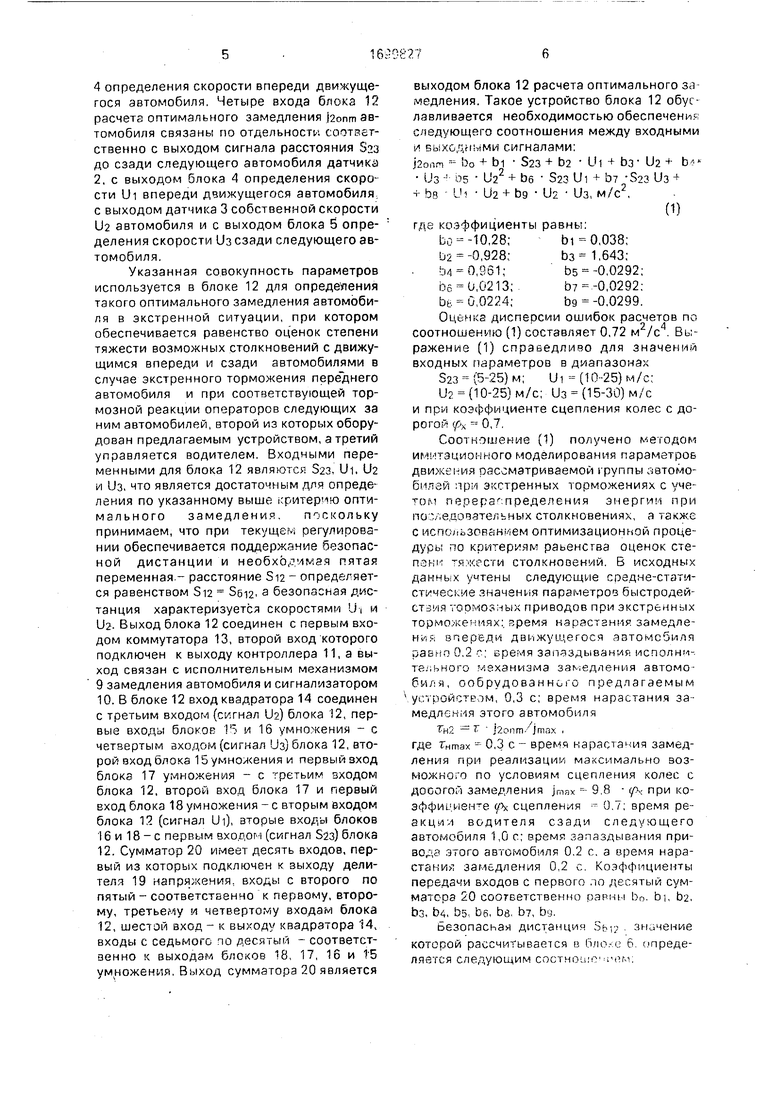
Согласно (3) блок 6 вычитания Зб12 (фиг.2) содержит два квадратора 21 и 22, делитель 23 напряжения и сумматор 24, Входы квадратора 21 соединены с первым входом блока 6, второго квадратора 22 - с вторым входом блока 8. Сумматор 24 имеет четыре входа, К первому подключен выход делителя 23 напряжения, к второму- выход квадратора 21, к третьему - выход квадратора 22, к четвертому - второй вход блока
24является выходом блока 6, Этот выход подключен к первому входу блока 7 сравнения дистанций, Блок 7 содержит сумматор
25и разделительные диоды 26 и 27. Положительный вход сумматора 25 соединен с первым входом блока 7, отрицательный - с вторым входом блока, а выход сумматора связан через диод 26, включенный в обратном направлении, с первым выходом блока
7,а через диод 27, включенный в прямом направлении, - с вторым выходом блока 7, Контроллер 11 (фиг. 1) предназначен для определения ззмедлрния впереди движущегося автомобиля и для выработки управляющего сигнала на автоматическое торможение с оптимальным замедлением, когда замедпение впереди движущегося автомобиля превышает допустимое. Контроллер содержит (фиг.З) дифференциатор 28, делитель 29 напряжения и компаратор 30. Вход дифференциатора связан с входом контроллера, а выход - с первым входом компаратора, второй вход которого подключен к выходу делитепя 29 напряжения. Выход компаратора является выходом контроллера.
Коммутатор 13 выполняется на основе транзистора 31 (в простейшем виде), например, p-n-р типа. Эмиттер транзистора является первым (силовым) ьходом коммутатора, соединенным с выходом блока 12. база транзистора, как управляющий вход коммутатора, связана с выходом контроллера.
Коллектор подключен к выходу коммутатора.
Исполнительные механизмы 8 и 9 рпз- гона и замедления автомобиля (фи-.1) ясляются устройствами со следящим действием. Механизм 8 разгона аыполня ется, например, в виде автоматизированного привода топливоподачи двигателя автомобиля (рейки топливного насоса или
дроссельных заслонок карбюратора). Механизм 9 замедления является злектро- вакуумногидравлическим электропневматическим, электрогидравлическим высокого давления, электромагнитным или иного типа автоматизированным приводом колесных тормозных механизмов автомобиля.
Устройство работает следующим образом,
Изменение текущих параметров движения (Ui, , Us, 812, 823) автомобилей непрерывно фиксируется датчиками 1, 2 и 3 (фиг.1), В сумматоре 4 по сигналу относительной скорости Ui2 с впереди движущимся автомобилем с переднего локационного
датчика 1 и сигналу собственной скорости 1)2 с датчика 3 рассчитывается скорость Ui впереди идущего автомобиля:
Ui U2-Uia.(4)
В сумматоре 5 скорость Кз сзади следующего автомобиля определяется по величине собственной скорости U2 с датчика 3 и
относительной скорости U23 со сзади следующим автомобилем с заднего локационного датчика 2:
Уз U2 + U23 .(5)
В блоке 6 по значениям скоростей Ui и U2 оценивается безопасная дистанция Зб12 в соответствии с выражением (3). При этом делитель 23 напряжения (фиг.2) подает на вход сумматора 24 сигнал, пропорциональный запасу дистанции С, квадратор 21 - сигнал, пропорциональный U, квадратор 22 - U22- а с второго входа блока 6 сигнал U2. Сигнал на выходе сумматора
соответствует величине безопасной дистанции. Блок 7 сравнения дистанций определяет разность AS Зб12 Si2 управляет подачей сигнала рассогласования на тот или иной исполнительный механизм. Отрицательный сигнал рассогласования (A S 0) с выхода сумматора 25 проходит через диод 26 на первый выход блока 7 и далее к исполнительному механизму 8 разгона, что приводит к его включению, к увеличению скорости автомобиля, к уменьшению текущей дистанции Si2 и к увеличению безопасной дистанции 5б12 В результате сигнал рассогласования приводится к нулю. При Д S 0 сигнал с выхода сумматора
25 поступает через диод 27 на исполнительный механизм 9 замедления (фиг.1), а также на сигнализатор 10. Происходит уменьшение скорости и восстановление равенства между Si2 и 5б12 Так работает в предлагаемом устройстве подсистема однонаправленного слежения и поддержания безопасной дистанции.
Одновременно и непрерывно в процессе текущего движения контроллер 11 и блок 12 расчета оптимального замедления обрабатывают информацию, необходимую для работы подсистемы двухнаправленного слежения. Квадрат 14 блока 12 вырабатывает сигнал U2 , блоки 15-18 умножения - сигналы (U2 Уз), (S23 Уз), (U 1 Ua) и (S23 Ui) соответственно, которые поступают на входы сумматора 20 вместе с сигналом с делителя 19 напряжения, соответствующим постоянному коэффициенту bo. Сумматор 20 формирует сигнал оптимального замедления J2onm по соотношению (1), подаваемый на выход блока 12 и далее на первый (силовой) вход коммутатора 13.
Дифференциатор 28 контроллера (фиг.З) по изменению скорости впереди идущего автомобиля оценивает его замедление J1, которое подается на первый вход компаратора 30. Пороговое значение замедления jnp, подаваемое на второй вход компаратора 30 от делителя 29 напряжения, соответствует режиму экстренного торможения при заданном коэффициенте сцепления с дорогой. Сигнал управления коммутатором и далее исполнительным механизмом замедления появляется на выходе компаратора 30;являющемся и выходом контроллера в целом, лишь тогда, когда интенсивное замедление впереди идущего автомобиля вызывает аварийную ситуацию, т.е. при Ji jnp.
Для повышения надежности срабатывания контроллера величину порогового замедления можно установить на уровне
jnp (0,90 - 0,95) jmax(6)
Когда такая экстренная ситуация возникает, в коммутаторе на базу транзистора 31 подается сигнал управления с контроллера 11. Транзистор открывается и на выход коммутатора пропускается сигнал оптимального замедления с первого входа коммутатора 13.
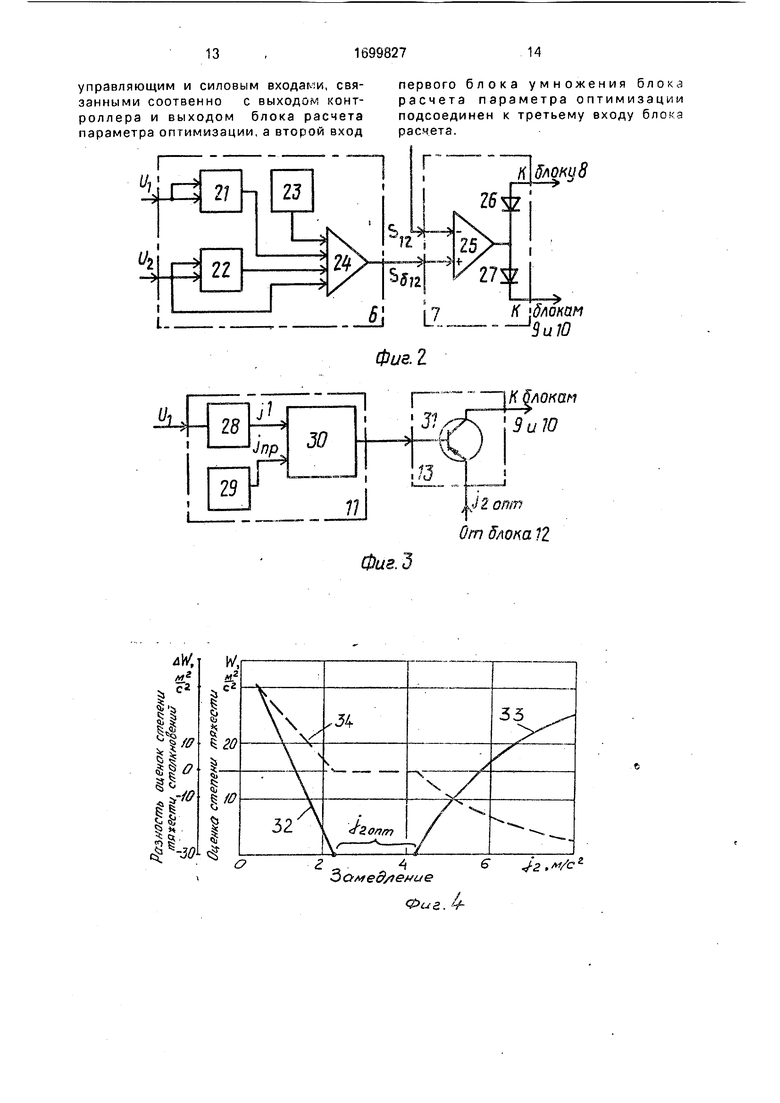
На фиг.4 и 5 иллюстрируется возможность и пути выбора оптимального режима автоматического торможения автомобиля (оптимального замедления) при различных условиях движения. Оценочными параметрами, характеризующими уровень безопасности движения, являются оценки W и А/23 степени тяжести возможных столкновений со впереди движущимся и со сззд.1 следующим автомобилями соответственно. 5 Смысл оценок Wi2 и W23 состоит в определении потерянной при столкновениях кинетической энергии автомобилей, приходящейся на единицу их массы, что и характеризует степень тяжести столкно10 венмй. При выборе этих оценок принято во- внимание, как и для известного устройства, следующее, Считаем, что тяжесть столкновения пропорциональна энергии удара, тогда степень тяжести оценивается величи- 15 ной потерянной кинетической энергии при столкновении. Столкновение автомобилей можно отнести к типу абсолютно неупругих ударов, т.е. таких, при которых вся потерянная кинетическая энергия расходуется, нз0 пример, на деформацию кузовов. Для такого типа удара потерянная кинетическая энергия пропорциональна квадрату относительной скорости между автомобилями в момент столкновения. Поэтому конкретно
5 степень тяжести оценивается величиной квадрзта относительной скорости к ту столкновения.
Оценки Wi2 и W23 определяются при расчете по исходным координатам относи0 тельного положения (расстояния Si2 до впереди идущего и $23 до сзади следующего автомобилей), абсолютным скоростям автомобилей (LH - впереди движущегося, U 2 - управляемого устройством, из - сзади сле5 дующего) и по характеристикам процесса торможения в опасной ситуации, вызванной экстренным торможением впереди идущего автомобиля и последующей реакцией всех сзади следующих. Коэффициент сцепления
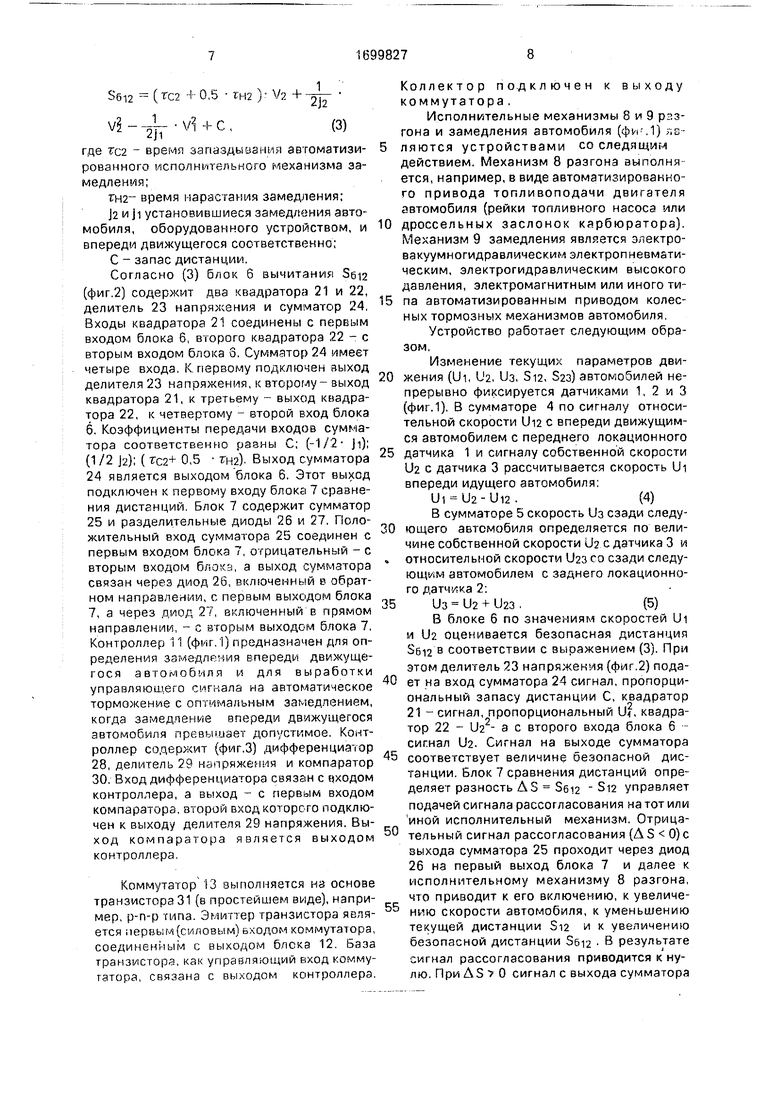
0 колес с дорогой принимаем постоянным для всех колес и всех автомобилей и равным у 0.7. При начальных значениях 512 0,1м; 823 22м; Ui - 22,8 м/с; U2 12,2 м/с; Us i7,2 м/с увеличение
5 интенсивности торможения автомобиля, управляемого устройством (j2 - установившееся замедление этого автомобиля, фиг.4), приводит к уменьшению степени тяжести WIT столкновения со впереди движущимся
0 автомобкгзм (график 32) вплоть до предотвращения его при J2 ,4 м/с . Однако, при дальнейшем увеличении замедления (более 4,2 м/с ) будут возникать соударения со сзади следующим автомобилем (кривая
5 33 - оценка Л/23 степени тяжести). Таким образом, существует зона оптимальных
замедлений (2.4 J2o
4 2} м/с для
которой также справедливо выражение IAW - I Wi2 - W2J Kmm , (7)
а в данное cn iae -- С,
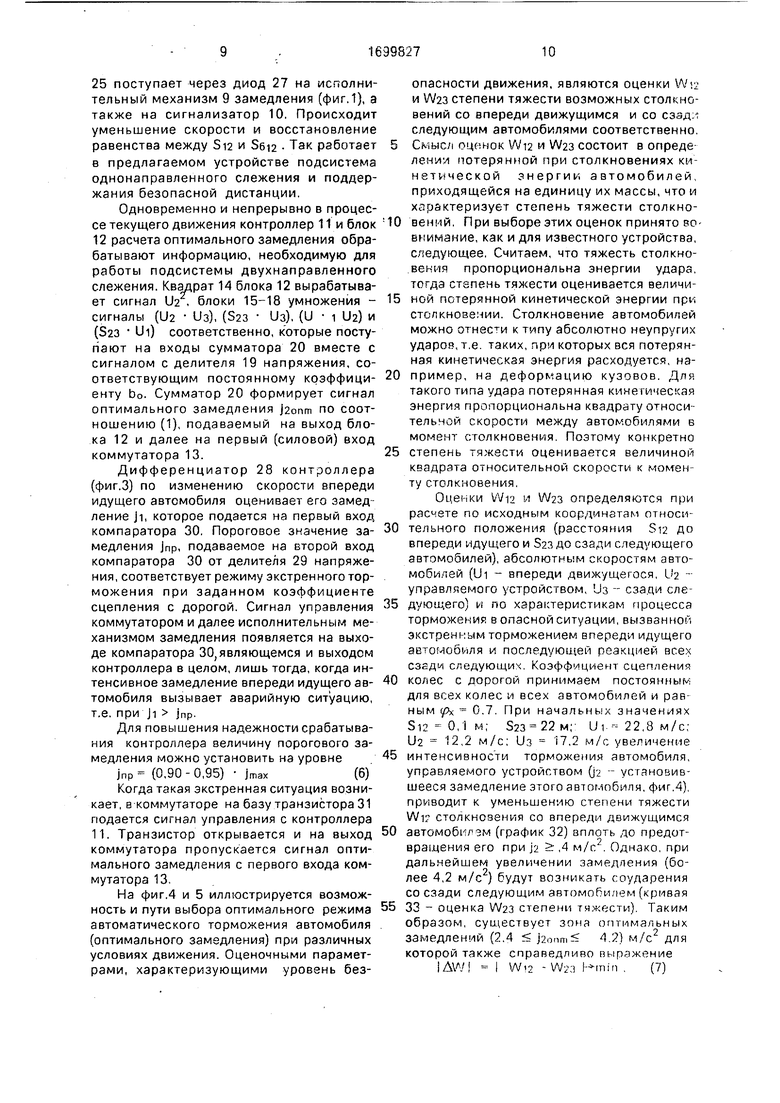
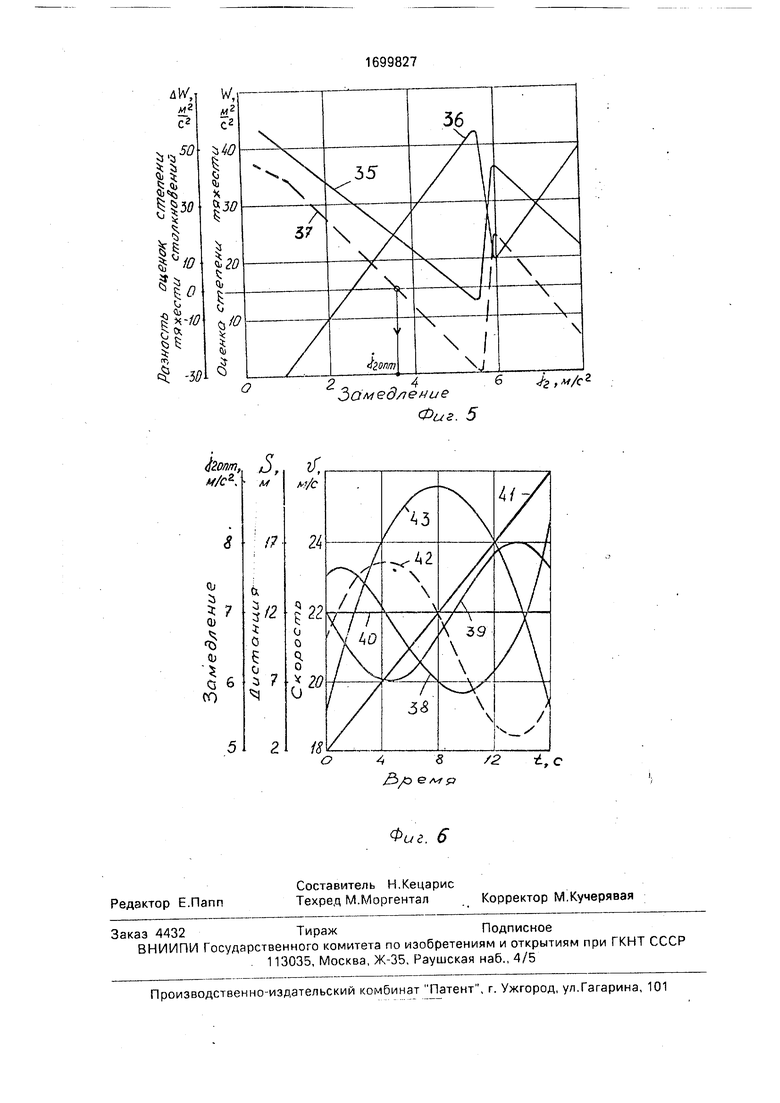
Прм иных начальных условиях движения (для фиг.5 Si2 13 м 2Г 22 м; Ui 22.8 м/с; U -22,8 м/с; Уз- 27,8 м/с) варьированием замедления предотвратить столкновения с обои/ автомобилями невозможно. Задание величин i от 0,5 до 5,5м/с обуславливает уменьшение оценки Wi2 (график 35) и увеличение Л/23 (график 36), при этом прежде происходит соударение с впереди идущим автомобилем. При ,5 м/с первичным становится соударение со сзади следующим автомобилем. За счет перераспределение энергии, масс в соударяющихся группах автомобилей при J2 5,5 м/с7 на оценочных характеристиках имеются скачки. Разность Д W оценок (график 37) уде one гвг.ряет. условию (7) при J2 3,5 м/с и J2 5,8 м/с2, однако оптимальным принимаем значение 3,5 м/с так как оно удовлетворяет еще одному, дополнительному условию: SW Wi2 + (8)
Характер изменения оптимрльного замедления автомобиля в процессе движения иллюстрируется графиками на фиг.6. Зависимость J2nom f(t) (график 3В), где t - текущее время, получена по соотношению (1) при следующих частных условиях: Ui Uib - sin (0,35 t)(график 39);
IJ2 22 м/с - consi(график 40);
из и3н + 0,5 t(график 4 i);
Si - Son(график 42);
(U Ы-(график 43)где UiH 22 м/с U,-,u - 16 м/с; 5 м
При эадг-нгом очр ироозн я независимь х пеое ЗгН /ч 23, Ui, Li2 и Уз требуемое ОГПИЬРГ.ЬНСС замедление нэхо дится в пределах (|;,9-Й,4) г,/-2. Это означает, что n(JM возн кчиве ич экстренных ситуаций осущес rpr.fi . тор(чоч:ение с максимальной 11 ч и с (лью требуется не в каждом случае, Кчиполое сильное влияние на J2onm. .уд, пс .еншо (}, оказывает величчьз собственно скорости автомобиля.
Применение предлагаемого устройства обеспечивает зл счет осуществления в экстренных .пя;с юрможений с интенсивностью, в общем случае меньшей максимально возможной nj условиям сцепления колес с дорогой, снижение ве- роятносш Олгиыровки колег автомобиля заноса, потери устойчивости и управляемости, уменьшение изгосй шин и нагруженно- сти механических узлов, уменьшение расхода знерпта па прмвеценпе. в действие механизма зэ о пенил, увеличение его срока служоы и надежности, Все это повышает безопасность движения и снижает тяжесть и народно-хозяйственные потери тех столкновений, которые невозможно предотвратить.
Формула изобретения
Устройство для поддержания безопасной дистанции между автомобилями в потоке, содержащее передний и задний локационные датчики, датчик собственной скорости автомобиля, блоки определения скорости движущихся впереди и сзади автомобилей, блок расчета безопасной
дистанции до впереди движущегося автомобиля, блок сравнения безопасной и действительной дистанций, исполнительные механизмы разгонэи замедления автомобиля, сигнализатор опасности для
сзади следующего автомобиля, контроллер экстренного режима и блок расчета параметра оптимизации, имеющий четыре входа, первый из которых соединен с выходом сигнала дистанции до сзади следующего авгомобиля заднего локационного датчика, второй - с выходом блока определения скорости впереди движущегося автомобиля, третий - с выходом датчика собственной скорости автомобиля, четвертый - с выходом блока определения скорости сзади следующего автомобиля,причем состоит блок расчета параметра оптимизации из сумматора, делителя напряжения, четырех блоков умножения и квадратора, при этом
первые входы первого и второго блоков умножения соединены с четвертым входом блока расчета, первый вход третьего блока умножения и вход квадратора - с третьим входом блока расчета, второй вход третьего
и первый вход четвертого блоков умножения - с вторым входом блока расчета, вторые входы второго и четвертого блоков умножения - с первым входом блока расчета, з из десяти входов сумматора первый
подключен к выходу делителя напряжения, входы с второго по пятый - соответственно к первому, второму, третьему и четвертому входам блока расчета, шестой вход сумматора - к выходу квадратора, входы с седьмо0 го по десятый - соответственно к выходам четвертого, третьего, второго и первого блоков умножения, а выход сумматора является выходом блока расчета параметра оптимизации, отличающееся тем, что, с целью
5 повышения безопасности движения автомобиля в потоке путем задания оптимальной интенсивности торможения в экстоенной ситуации, оно снабжено подключенным к входу исполнительного механизма замедления коммутатором с
управляющим и силовым входами, связанными соотвенно с выходом контроллера и выходом блока расчета параметра оптимизации, а второй вход
Замедление
первого блока умножения блока расчета параметра оптимизации подсоединен к третьему входу блска расчета.
К блокам 9иЮ
2 опт От блока 12
Фиё.З
Фиг. vL
&W,
f2
С
1 P
§|
it
«|,
Јx-#
Г
$ -58
О
Замедление
faonm, /сг.
2,
M
S
/7
7
e
tx
2
0
5
§7
51
2l
JZ,M/CZ
Фиг. 5
| Устройство для поддержания безопасной дистанции | 1989 |
|
SU1632820A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
