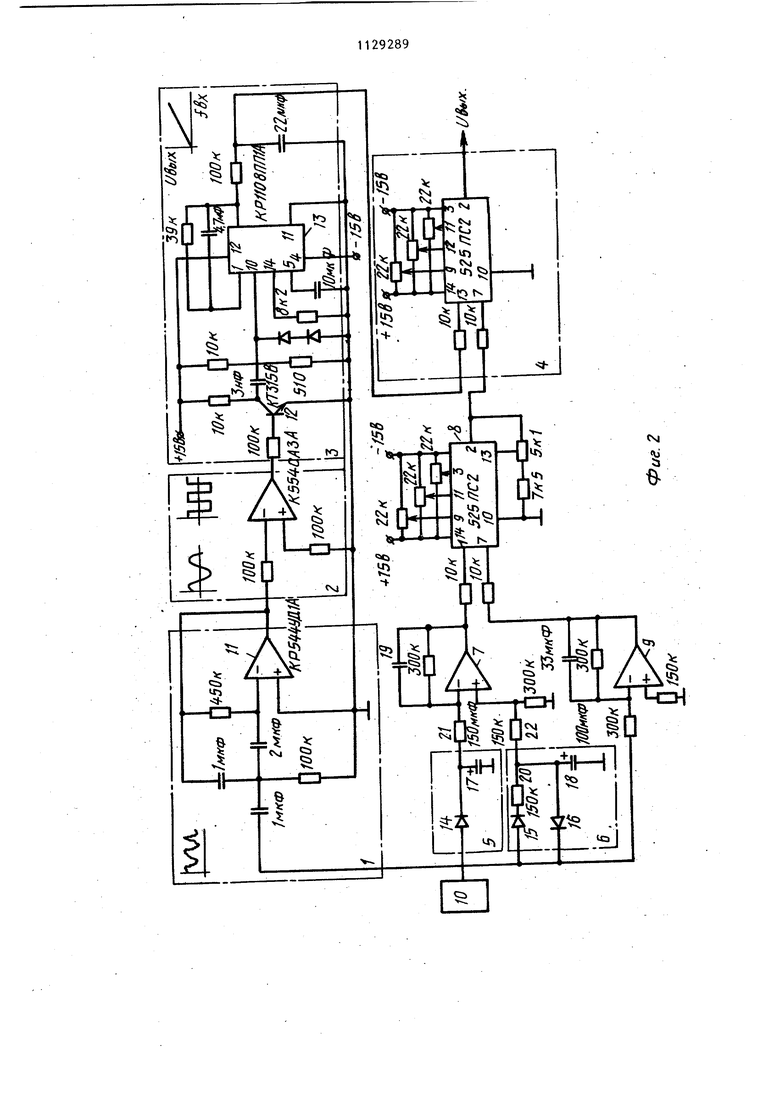
Фиг. 1 Изобретение относится к горной технике и может быть использовано при создании систем регулирования производительности землечерпательных агрегатов и драг. Известен способ определения крепости горных пород, основанный на из мерении сопротивления вдавливанию стержня, имеющего заранее обусловленную форму 1 J. Согласно этому способу стержень ударяют специальным приспособлением, позволяющим дозировать и вьщерживать постоянную силу ударов, и углубляют стержень в измеряемый грунт на определенную заданную величину, а по количеству ударов, затраченных на это углубление, судят о крепости исследуемого грунта. Недостатком способа является низкая точность определения крепости, вызванная тем, что представительност исследуемой пробы чрезвычайно мала в применении характерист-ики крепости для целого забоя. Кроме того, способ определения крепости носит дискретный характер, не пригодный для решения задач непрерывного регулирования процессом драгирования. Наиболее близким по технической сущности к предлагаемому является способ определения крепости грунта при драгировании, основанный на изме рении величины нагрузки привода черпаковой цепи, вьщелении из нее усред ненных во времени амплитуд переменной и постоянной составляющих и опре делении отношения вьделенных амплитуд 23. Недостатком способа определения крепости грунта является низкая точнесть определения, вызванная тем, что результат определения крепости зависит от изменения скоростных режимов р.езания грунта. Изменение скоростного режима реза ния черпающего аппарата драги (скорости движения черпаковой цепи) вызывает изменение кинетической энергии, запасаемой в маховых массах при вода черпаковой цепи. При этом изменяется момент на валу движения, т.е. переменная составляющая тока кагрузки двигателя. Таким образом, при одной и той же крепости грунта и величине постоянно составляющей тока нагрузки привода черпаковой цепи результаты определе192 ния крепости грунта оказываются зависимыми от скорости черпания. Изменение скоростного режима черпающего аппарата драги может происходить в любой момент работы драги в результате оперативного вмешательства со стороны дра,гера или в результате воздействия системы авторегулирования. Цель изобретения - повышение точности определения крепости грунта при переменных скоростях режима черпания . Поставленная цель достигается тем, что согласно способу определения крепости грунта при драгировании, основанному на измерении нагрузки привода черпаковой цепи, вьщелении из нее усредненных во времени амплитуд переменной и постоянной составляющих и определении отношения выделенных амплитуд, дополнительно выделяют частоту переменной составляющей нагрузки привода черпаковой цепи, определяют произведение отношения усредненных во времени амплитуд переменной и постоянной составляюпщх нагрузки привода черпаковой цепи на частоту переменной составляющей нагрузки привода черпаковой цепи и О крепости грунта судят по величине полученного произведения. Введение корректирующего сигнала по частоте переменной составляющей тока нагрузки привода черпаковой пепи, который характеризует скорость черпания, в качестве указанного множителя позволяет автоматически компенсировать изменения величины сигнала, пропорционального усредненной во времени амплитуде переменной составляющей тока нагрузки привода черпания, происходящие при набросах нагрузки на черпающий аппарат драги при врезании черпаков в грунт, что повышает точность способа. На фиг. 1 представлена функциональная схема устройства, реализующего способ; на фиг. 2 - принципиальная электрическая схема устройства; на фиг. 3 - диаграмма работы устройства; на фиг. 4 - зависимость уровня непрерывного входного сигнала от частоты переменной составляющей нагрузки. Способ осуществляется следующим образом. В процессе драгирования непрерывно регистрируют одновременно три параметра тока нагрузки привода черпания: усредненную во времени амплитуду переменной составляющей, которую преобразуют в электрический сигнал А«, усредненную во времени амплитуду постоянной составляющей, которую преобразуют в электрический сигнал А, частоту переменной составляющей, которую преобразуют в электрический сигналА. Затем последовательно осу ществляют операцию деления, т.е. сна чала определяют отношение - д,где к характеризует крепость грунта для постоянных значений скоростей резания грунта, и умножения, т.е. на блоке 6 вырабатывают сигнал K/l.K, где К характеризует крепость грунта инвариантную к изменениям скорости черпаковой цепи. При регулировании скорости черпания эффективность действия маховых масс, применяемых в существующих приводах для сглаживания нагрузки с резко аБфаженным переменным характером, меняется. Кинетическая энергия запасаемая в маховых массах, определяется из выражения . где I - момент инерции маховиков; Чи - угловая скорость маховиков. В случае неизменной жесткости ме ханических характеристик электропри вода, которые характерны для примен емых электроприводов постоянного то ка, при наборе нагрузки от М до .Мто, на валу привода черпания момен на валу электродвигателей изменяется от М до М при установленной скорости сорили от MO до Mj при уста новленной скорости to,. При этом ск рость черпания снижается в первом случае на величину Дш, во втором случае - на величину Ди)2 Энергия, отдаваемая маховиками на преодолени пика нагрузки, определяется в первом случае .2 I. . .... 2 () 3(2u)uu)-dujJ| 2 - 2 во втором случае - 1 -J . --{з((-&(1 ; бозначим отношение скоростей (диаазон регулирования) как U) Расход энергии маховиков на преодоение одного и того же пика нагрузки в первом и во втором случаях один и тот же, т.е. 1з(2ы,ди)-ли)(2 jdWjd отсюда 2и)) Пренебрегая величинами получают )2.(JJ - - С Это значит, что снижение скорости при набросе нагрузки и соответствующее ему изменение момента на валу двигателя (переменная составляющая нагрузки) пропорциональны диапазону регулирования скорости привода черпания, таким образом, величина амплитуды переменной составляющей нагрузки привода черпания обратно пропорциональна скорости черпания. Величина постоянной составляющей нагрузки остается неизменной на любой скорости черпания. . Частота переменной составляющей на рузки привода черпаковой цепи равна частоте врезания черпаков в грунт и,следовательно, пропорциональна скорости черпания. Способ осуществляется устройством, которое состоит из последовательно соединенных фильтра 1 высоких частот, нуль-органа 2, преобразователя 3 дискретного сигнала в аналоговый сигнал, множительного устройства 4, детекторов амплитуды высокого уровня 5 и низкого уровня 6, суммирующего усилителя .7,делительного устройства 8,причем входы детекторов амплитуды 5 и -6 соединены с входом фипьтра 1 высоких частот, а выходы - с входами суммирующего усипителя 7, выход которого соединен с входом делительного устройства 8, выход которого подключен к другому входу множительного устройства 4. Кроме-того, устройство включает сглаживающий фильтр 9,вход которого соединен с входом
5 -1
фильтра 1 высоких частот, а выход с входом делительного устройства 8. Выходом устройства для определения крепости грунта при драгировании являет ся выход множительного устройства 4. . сигналом является сигнал с датчика 10 тока привода черпаковой цепи.
Фильтр высоких частот 1 собран .по схеме Баттерворга на операционном усилителе 11; в качестве нуль-органа 2 использован усилитель для сравне,- « кия сигналов по амплитуде; преобразователь 3 дискретного сигнала в аналоговый сигнал построен с использованием транзистора 12 и преобразователя 13; делительное 8 и множительное 4 устройства вьшолнены на основе аналоговых перемножителей; детекторы амплитуды 5 и 6 собраны на диодах 14, 15 и 16, конденсаторах 17, 18 и 19 и резисторах 20, 21 и 22,суммирующий усилитель 7 и сглаживающий фильтр 9 вьшолнены на основе операционных усилителей.
Устройство работает еледуюцрм .образом,.
Фильтр 1 высоких частот вьщеляет из входного сигнала (фиг. За) переменную составляющую низкой частоты (фиг. 36), соответствующую частоте врезания черпаков в грунт. Нуль-орган 2 преобразует сигнал переменной составляющей в переменный сигнал прямоугольной формы той же частоты (фиг. Зв), транзистор 12 пропускает импульсы только одной полярности (в данном случае положительной, фиг.. Зг) . Преобразователь 13 преобразует импульсы прямоугольной формы в непрерывный сигнал (фиг. Зд), уровень которого находится в прямой зависимости от частоты входного сигнала (фиг. 4).
Детекторы амплитуды высокого 5 и низкого 6 уровней и суммирующий усилитель 7 образуют устройство вьщеления усредненной вр времени амплитуды переменной составляющей исходного сигнала.
Исходный сигнал, получаемый с датчика 10 тока привода черпаковой цепи
92896
(фиг, Зе, кривая 1), преобразуется детекторами 5 и 6 в амплитуды высокого (фиг.Зе, кривая 2) и низкого (фиг. Зе, кривая 3) уровней. Через диод 14 конденсатор 17 заряжается мгновенно до амплитуды высокого уровня исходного сигнала, а-разряд происходит медленно через входной резистор суммирующего усилителя 7,
0 подключенного к инвертирующему входу. Конденсатор 18 заряжается медленно через диод 15 и резистор, когда исходный сигнал имеет высокий уровень напряжения, а разряжается мгновенно до самого низкого уровня исходного сигнала через диод 16. Сигнал с конденсатора 18 подается через другой входной резистор на .неинвертирующий вход суммирующего усилителя 7. На выходе усилителя. 7 формируется
усредненный во времени с помощью конденсатора 19 сигнал, пропорциональный амплитуде переменной составляющей исходного сигнала.
Сглаживающий фильтр 9 формирует
усредненный во времени сигнал, пропорциональный амплитуде постоянной , составляющей, исходного сигнала. Делительное устройство 8 производит деление сигнала, пропорционального
0 амплитуде переменной составляющей сходного сигнала на сигнал, пропорциональный амплитуде постоянной со ставляющей исходного сигнала.
Множительное устройство 4 произ5 водит перемножение сигналов с выхода делительного устройства 8 на сигнал, пропорциональный частоте переменной составляющей исходного сигнала, по- ступающий с выхода преобразователя 13.
0
На выходе множительного устройства формируется сигнал, пропорциональный крепости грунта при драгировании.
Использование способа позволяет повысить точность определения крепости грунта при драгировании с переменной скоростью черпания и, соответственно, с больщей точностью формиро-. вать сигнал задания по нагрузке чер паковой цепи в устройствах управления производительностью драгирования.
H /TvTv/

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения крепости грунта при драгировании | 1985 |
|
SU1268672A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Устройство контроля категории крепости грунта при драгировании | 1983 |
|
SU1106900A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Способ автоматического управления процессом драгирования | 1988 |
|
SU1609877A1 |
| Адаптивный регулятор производительности добычного аппарата драги | 1985 |
|
SU1270221A1 |
| Черпающее устройство драги | 1977 |
|
SU732450A1 |

СПОСОБ ОПРЕДЕЛЕНИЯ КРЕПОСТИ ГРУНТА ПРИ ДРАГИРОВАНИИ, основанный на измерении нагрузки привода черпаковой цепи, вьщелении из нее усредненных во времени амплитуд переменной и постоянной составлякицих и определении отношения вьщеленных амплитуд, отличающийся тем, что, с целью цовышения точности определения крепости грунта при переменных скоростях режима черпания, дополнительно вьщеляют частоту переменной составляющей нагрузки привода черпаковой цепи, определяют произведение отношения усредненных во времени амплитуд переменной и постоянной составляюощх нагрузки привода черпаковой цепи на частоту переменной составляющей нагрузки привода черпа§ ковой цепи и о крепости грунта судят (Л по величине полученного произведения.
J
Фае.З
Фаг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ветров А.А | |||
| Резание грунтов землеройными машинами | |||
| М., Машиностроение , 1971, с | |||
| Способ приготовления искусственной массы из продуктов конденсации фенолов с альдегидами | 1920 |
|
SU360A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРЕПОСТИ ГРУНТА ПРИ ДРАГИРОВАНИИ | 0 |
|
SU264293A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
